ROS instalação ubuntu18.04
Primeiro, selecione a versão
De acordo com o blog cada lançamento das mais recentes (2019) ROS aplicáveis plataforma de sistema operacional e linguagem ferramentas do Linux necessário
para selecionar Melodic Morenia (maio 2018 - maio 2023 ) versão das ROS.
Em segundo lugar, a instalação
Recomendado Bowen:
instalar a versão ROS Melodic do sistema operacional robô Ubuntu 18.04 LTS (! 2019 Nian Atualizado em outubro MoveIt 1.0 ROS 2,0 precipita)
Para instalar ROS sob Ubuntu18.04
1, a biblioteca de software de configuração
Permitir "restrito", "universo", e "multiverso".

2, altere a origem do pacote para uso doméstico
Você pode ver meu blog atualizada fonte de fonte de software Ali
3, definir o seu computador para aceitar o software do packages.ros.org
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
4, definir a chave
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
5, a instalação
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
Encontrou um problema
não pode ser corrigido pacote faltando. E: Não foi possível baixar http://cn.archive.ubuntu.com/ubuntu/pool/universe/o/opencv/libopencv3.2-java_3.2.0+dfsg-4ubuntu0.1_all.deb 无法连接上 117.128.6.21:80 (117.128.6.21),连接超时。。。
Solução:

Adicionar a posição mostrada na Fig.
deb http://archive.ubuntu.com/ubuntu/ trusty main universe restricted multiverse
No terminal
sudo apt-get update
Em seguida, voltar a essa instalação passo de equipamentos pesados.
Em seguida, instalar o python-rosdep
sudo apt install python-rosdep
6, a inicialização
sudo rosdep init
rosdep update
problemas experiência
error loading sources list:the read operation timed out
Resolva
hotspot aberto usando um telefone móvel, mas também hotspot móvel, estou aqui Unicom diferença do sinal ...
7, adicione a variável de ambiente
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8, instalar o plug
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
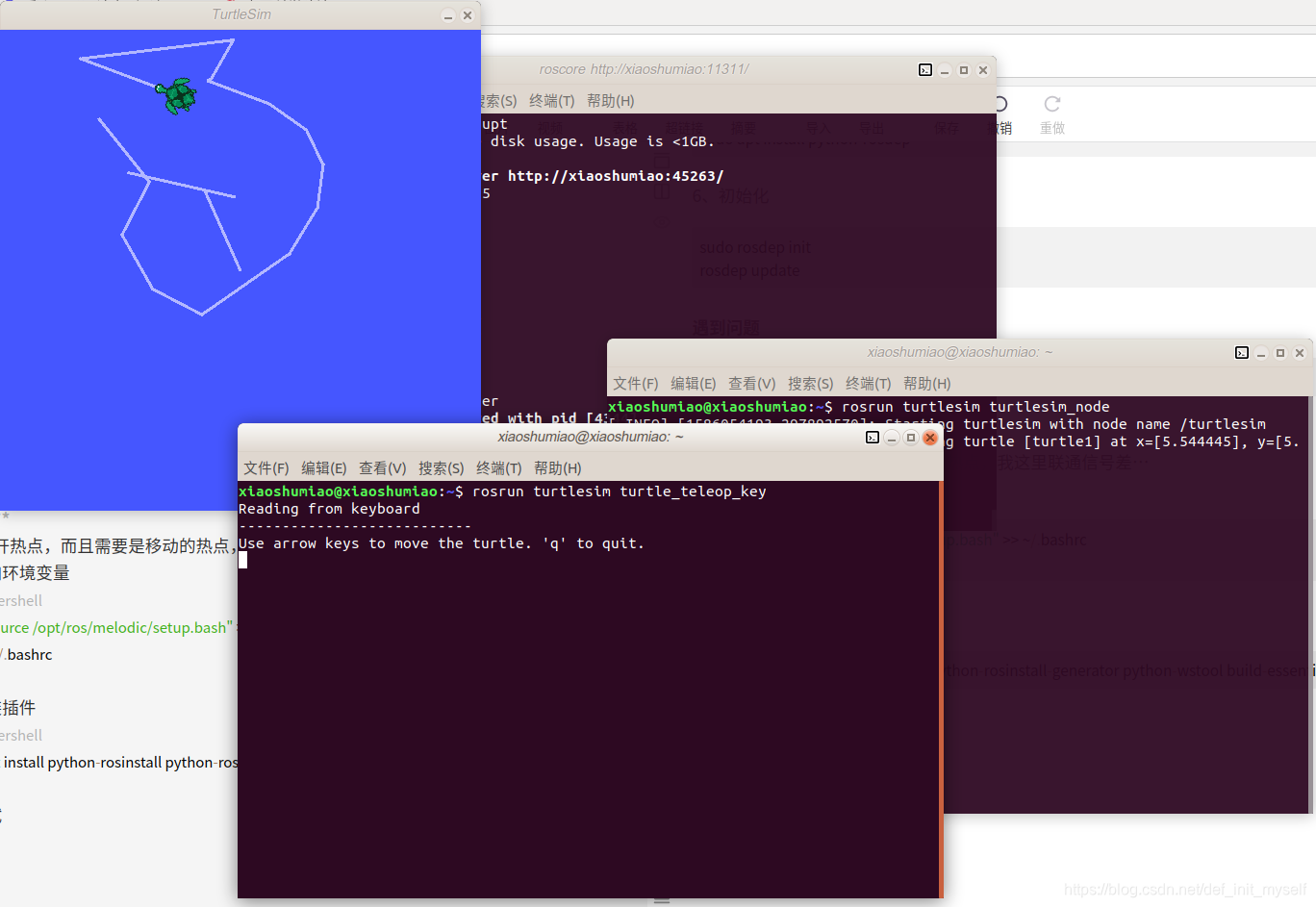
Teste 9.
Um total de três terminais livres, são introduzidos:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
obter!