Ponto agrupamento nuvem e região estimativa de limite
Ponto de nuvem de dados para as determinadas características e agrupamento divisão regular, o trabalho propõe um método de agrupamento e as características espaciais da fusão, e na região de detecção do limite com base no agrupamento (de um lado do artigo que é método mencionado), a idéia específica do algoritmo é a seguinte:
(1) pré-tratamento ponto de nuvem , bombeando grega, e similares para secar .
(2) não pode ser removido áreas divididas;
(3) O que se segue é a área restante da divisória conjunto, seleccionando x máximo de superfície como uma pesquisa cara semente começou , a pesquisa para o raio adjacente, um raio é R , quando o raio R procurou dentro n os triângulos, estes triângulos Comparativo média ponderada superfície mid_d limiar de diferença é conjunto delta_d, se a diferença for menor do que a distância valor limiar delta_d , então a busca para ser um aglomerado triangular cara Custer integração, de outra forma, sem fusão, e depois há uma nova superfície de entrada rosto semente, continuar a procurar o exposto, e calcula um novo campo média ponderada mid_d . Esta iteração até que toda a divisão completa de todos os clusters.
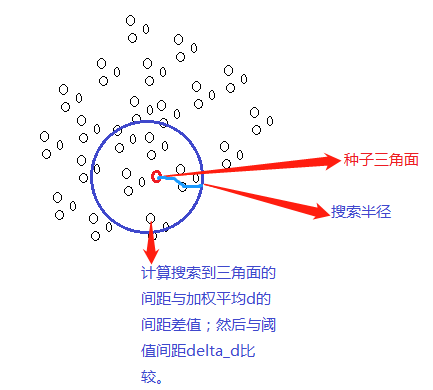
diagrama esquemático
(4) pode ser obtido por O terceiro passo muitas agrupamento Custers , através de todos os conjuntos Custers , desde que o número mínimo de pontos ou limiar área A3 , excluindo uma área de menos do que A3 agrupamento Custer ; cada Custer detecção limite de superfície Triangulate e integração.
(5) para detectar um limite da quarta etapa, o tratamento serrilha, processamento de alisamento principalmente limite, existe um limite de intensidade de alisamento dis_threshold , como um limite de área ; retornar os dados área limite.
(Nota: O terceiro passo principal é a de dividir o em dois passos, um passo Teoria cluster)
Parte do código:
int Divisão ( std :: vector <PointType> & in_points, std :: vector <PCTTM_TriangleFace> & face_vect, std :: vector < double > & distance_vect, std :: vector <PointType> & face_center_points2, std :: vector <std: : vector < int >> & region_vector, const double & d_threshold, const int & num_threshold) { se (in_points.size () < 3 || face_vect.size () == 0 || distance_vect.tamanho () == 0 ) { Std :: cout << " in_points.size () <3 || face_vect.size () == 0 || distance_vect.size () == 0 " << std :: endl; voltar - 1 ; } Std :: vector <PointType> face_center_points; // std :: vector <point3f_rgba> face_center_points2; // 计算三角面几何中心 std :: vector < double > distance_vect2; // 剔除灰色 std :: vector < int > out_index (face_vect.size ()); para (size_t i = 0 ; i <face_vect.size (); i ++ ) { PointType pt2 = calculateFaceCenter (in_points [face_vect [i] .p_index_0], in_points [face_vect [i] .p_index_1], in_points [face_vect [i] .p_index_2]); int d_index = static_cast < int > ( 10,0 * d_threshold / 5,0 ); int índice = static_cast < int > ( 10,0 * distance_vect [i] / 5,0 ); se (distance_vect [i] <= d_threshold) { face_center_points2.push_back (pt2); distance_vect2.push_back (distance_vect [i]); } Else { out_index [i] = -1 ; } Face_center_points.push_back (pt2); } / * ****************离散点的区域划分************************ * / árvore KDT :: KDTree; tree.setInputPointCloud (face_center_points2); tree.setNumOfLeafData ( 100 ); tree.buildKDTree (); dupla densidade = 0,0 ; se (caculateDensity (face_center_points2, densidade) == - 1 ) { std :: cout << " caculateDensity () falhou !!! " << std :: endl; voltar - 1 ; } Const duplo delta_threshold = 1,49999 ; // 0,3-3,0 const flutuador searchRadius = 3,0 densidade *; // 点云平均密度的1-3倍 // std :: vector <std :: vector <int >> region_vector; std :: vector < int > index_ (face_center_points2.size ()); para (size_t i = 0 ; i <face_center_points2.size (); i ++ ) { se (index_ [i] == - 1 ) { continuar ; } Std :: vector <int >region_; double mid_d = 0,0 ; / * ****************迭代循环搜索*********************** * / region_.push_back ( Eu); index_ [i] = - 1 ; int t = 0 ; mid_d = distance_vect2 [i]; enquanto (t < region_.size ()) { // mid_d = distance_vect2 [region_ [t]]; const PointType searchPoint2 = face_center_points2 [region_ [t]]; std :: vector <size_t> searchIndex2; std :: vector < Flutuar > searchDistance2; duplas dis = 0,0 ; int num = 0 ; se (tree.runKNNSearchRadius (searchPoint2, searchRadius, searchIndex2, searchDistance2)> 1 ) { para (size_t n = 0 ; n <searchIndex2.size (); n ++ ) { se ! (index_ [searchIndex2 [n]] = - 1 && abs (distance_vect2 [searchIndex2 [n]] - mid_d) < delta_threshold) { region_.push_back (searchIndex2 [n]); index_ [searchIndex2 [n]] = - 1 ; dis + = distance_vect2 [searchIndex2 [n]]; Num ++ ; } } } Mid_d = (dis + mid_d * (region_.size () - num)) / region_.size (); t ++ ; } // 存取大于的分域 se (region_.size ()> num_threshold) { region_vector.push_back (region_); } } Retornar 0 ; }
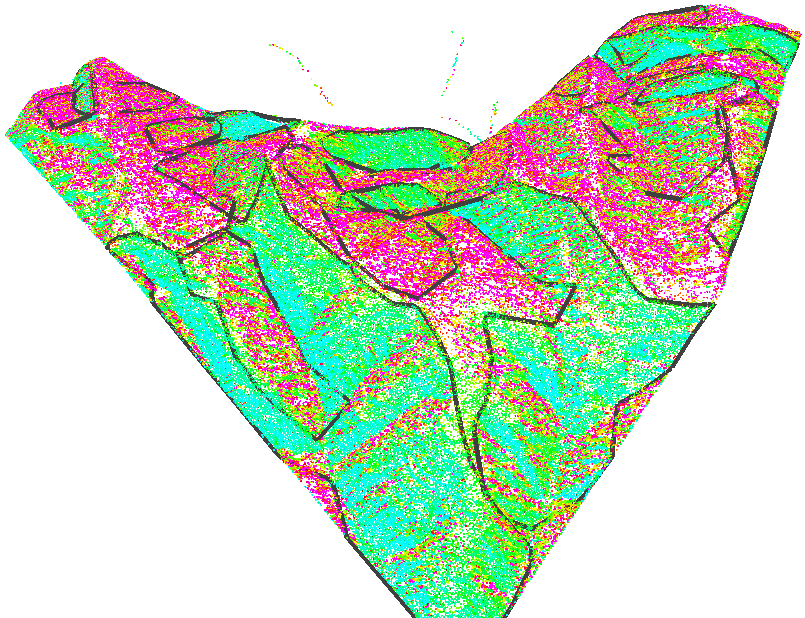
efeito: