읽기 쉽고, 그것을 기록 - 후
실험 내용 : 천막은, 부저 및 키 입력
공식 정보 : "는 STM32 중국어 레퍼런스 매뉴얼 V10은"제 8 장 일반 및 다중화 기능 IO (GPIO 및 AFIO가)
특징 : 작업을 등록 포함되지 않습니다, 친구 관련된 코드 비트 연산 초보자 라이브러리 함수 연산에 적합한
도 원리 :
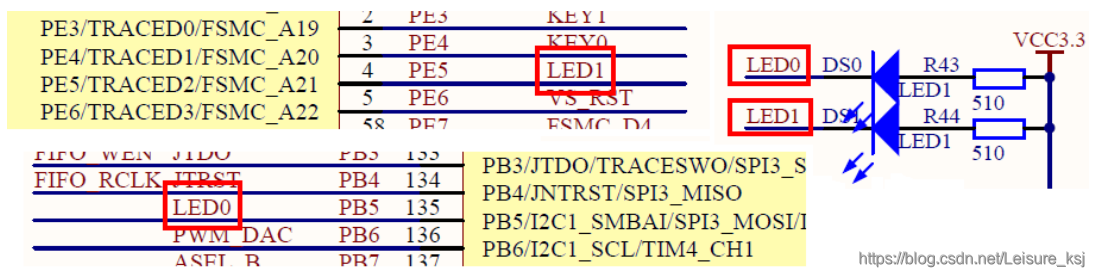
도시 된 바와 같이, 1), 윤곽, PB5 다음 LED0, PE5 LEDl 후,
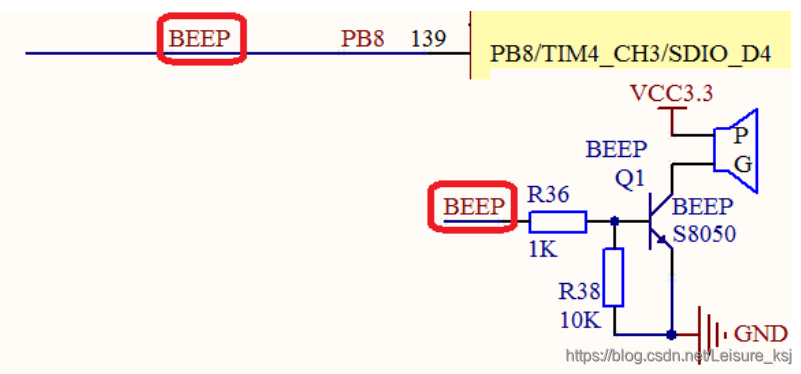
 2)에 도시 된 바와 같이, 버저 후 PB8 삑 소리의 조작 음 (비프 부)
2)에 도시 된 바와 같이, 버저 후 PB8 삑 소리의 조작 음 (비프 부)
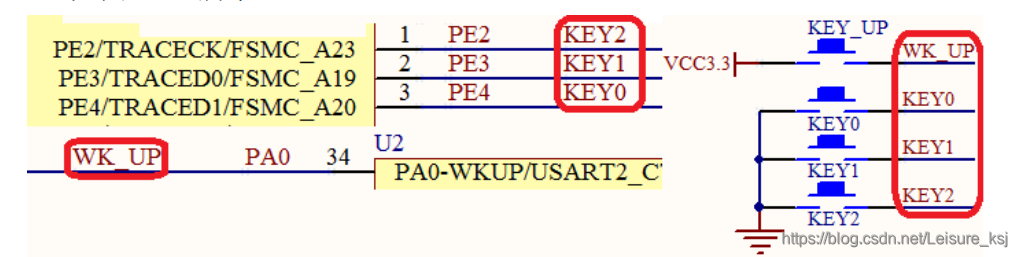
3)에 도시 된 바와 같이, 다음쪽에 KEY0 PE4, PE3 다음 KEY1, KEY2 PE2 후, 다음 PA0 WK_UP;
작품 주연 도킹 가진 GPIO 핀들을 꼭 상세히 다루지 않는다.
네 개의 GPIO 라이브러리 함수를 포함 :
1)void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct); //初始化作用
2)void GPIO_SetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin); //设置输出电平为高
3)void GPIO_ResetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin); //设置输出电平为低
4)uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef*GPIOx, uint16_t GPIO_Pin); //读取某个GPIO端口的输入电平stm32f10x_gpio.h 파일에서 , 다음 코드는, 당신은 명심해야합니다
typedef enum
{ GPIO_Mode_AIN = 0x0, //模拟输入//
GPIO_Mode_IN_FLOATING = 0x04, //输入浮空//
GPIO_Mode_IPD = 0x28, //输入下拉//
GPIO_Mode_IPU = 0x48, //输入上拉//
GPIO_Mode_Out_OD = 0x14, //开漏输出//
GPIO_Mode_Out_PP = 0x10, //推挽输出//
GPIO_Mode_AF_OD = 0x1C, //复用开漏输出//
GPIO_Mode_AF_PP = 0x18 //复用推挽输出//
}GPIOMode_TypeDef;주소에 해당하는 이들 8 개 모드 레지스터를 수정하는 방법 나는 조심스럽게 stm32f10x_gpio.c 파일 무효 GPIO_Init (GPIO_TypeDef * GPIOx, GPIO_InitTypeDef 해석 될 수 있습니다 관심이 모르는 * GPIO_InitStruct) 기능을.
실험 절차 :
1) 새로운 건설 템플릿;
2) 새 하드웨어 빈 폴더 (연결 폴더 USER)
MDK 소프트웨어 3), 새로운 led.c, beep.c 및 key.c 세 가지가 .c 파일과 대응 led.h는 beep.h key.h와 헤더 파일은 폴더 하드웨어에 저장됩니다;
4) led.h 헤더 코드를 다음과 같이. :
#ifndef __LED_H
#define __LED_H
void LED_Init(void);
#endif5) beep.c 헤더 코드는 다음과 같다 :
#ifndef __BEEP_H
#define __BEEP_H
void BEEP_Init(void);
#endif6) key.h 헤더 코드는 다음과 같다 :
#ifndef __KEY_H
#define __KEY_H
#include "stm32f10x.h"
void KEY_Init(void);
u8 KEY_Scan(u8);
#endif다음과 같이 7) led.c 문서의 코드는 다음과 같습니다
#include "led.h"
#include "stm32f10x.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE); //使能PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
GPIO_SetBits(GPIOB,GPIO_Pin_5); //PB.5 输出高,LED0灭
GPIO_Init(GPIOE, &GPIO_InitStructure); //根据设定参数初始化GPIOE.5
GPIO_SetBits(GPIOE,GPIO_Pin_5); //PE.5 输出高,LED1灭
}다음과 같이 8) beep.c 문서의 코드는 다음과 같습니다
#include "stm32f10x.h"
#include "beep.h"
void BEEP_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //蜂鸣器-->PB.8 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.8
GPIO_ResetBits(GPIOB,GPIO_Pin_8); //PB.8 输出低,蜂鸣器不叫
}다음과 같이 9) key.c 문서의 코드는 다음과 같습니다
#include "stm32f10x.h"
#include "key.h"
#include "delay.h"
void KEY_Init(void) //IO初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE); //使能PA,PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4; //KEY0-KEY2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE2,3,4
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.0
}
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1;//按键按松开标志
if(mode)key_up=1; //支持连按
if(key_up&&(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==0||GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)==0||GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2)==0||GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)==1))
{
delay_ms(10);//去抖动
key_up=0;
if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==0)return 1;
else if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)==0)return 2;
else if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2)==0)return 3;
else if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)==1)return 4;
}else if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==1&&GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)==1&&GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2)==1&&GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)==0)key_up=1;
return 0;// 无按键按下
}10)이 MDK 소프트웨어에서 바로이 target1, 프로젝트 항목 관리를 클릭 ..., 프로젝트 항목 인터페이스, 그룹 열, 새로운 하드웨어 및 led.c에 beep.c 및 key.c 세 가지가 .c 파일에 와서 추가;
11)이 MDK 소프트웨어에 마법을 클릭이 (가) beep.h 및 key.h 세 개의 헤더 파일 (즉, 하드웨어), 디렉토리 led.h를 추가 할 수의 ... 올바른 경로를 포함을 클릭, C / C ++ 옵션에 지팡이;
(12) ) 새로운 main.c의 주요 기능은, 같은 다음과 같습니다 :
#include "stm32f10x.h"
#include "delay.h"
#include "led.h"
#include "beep.h"
#include "key.h"
int main(void)
{
vu8 key=0;
delay_init();
LED_Init();
BEEP_Init();
KEY_Init();
while(1)
{
key=KEY_Scan(1);
if(key)
{
switch(key)
{
case 4:
GPIO_SetBits(GPIOB,GPIO_Pin_8); //控制蜂鸣器叫
break;
case 3:
GPIO_ResetBits(GPIOB,GPIO_Pin_5); //控制LED0亮
break;
case 2:
GPIO_ResetBits(GPIOE,GPIO_Pin_5); //控制LED1亮
break;
case 1:
GPIO_ResetBits(GPIOB,GPIO_Pin_5); //控制LED0亮
GPIO_ResetBits(GPIOE,GPIO_Pin_5); //控制LED1亮
break;
}
delay_ms(1000); //延迟1000ms
GPIO_ResetBits(GPIOB,GPIO_Pin_8); //控制蜂鸣器不叫
GPIO_SetBits(GPIOB,GPIO_Pin_5); //控制LED0灭
GPIO_SetBits(GPIOE,GPIO_Pin_5); //控制LED1灭
}
}
}13)이 완료되면 당신은 결과를 볼 수 실행할 수 있습니다.
지식 포인트 :
1)이 포함 된 네 개의 GPIO 라이브러리 함수의 의미를 배우고
, 2) 이해 key.c 파일 (U8) U8 KEY_Scan 로직 기능
- 참고하여주십시오 기반 라이브러리 함수를 3) 방법 프로젝트 템플릿을 작성하는 리뷰 STM32 학습 경험이 : 새로운 프로젝트 템플릿
