産業用ロボットの基礎
、産業用ロボットのハードウェア構成は、
コントローラ、ドライブ、サーボモータ、減速機、機械的負荷、エンドエフェクタアセンブリ、システム保護装置、各種入出力インターフェースを含みます。
オーストリアケバ産業オートメーションモデルCP 263 / Xコントローラにおける産業用ロボットの使用。


次のようにコントローラインタフェース:
1のEtherCAT
CAN 1
シリアル-
イーサネット×2 10/100 Mbit / sの
USBは、USB 2.0を2倍、フルスピードは、高パワー
K-バスは、追加モジュールに横向き
コンパクトフラッシュタイプ1
のグラフィックスDVI(ケバオペレーティングパネル用のみ)
拡張性の1xシリアル、1×CAN、 1XのPCI
コントローラの入力および出力を次のように
デジタル入力は、拡張した
デジタル出力0.5 Aが拡張された
デジタル出力Aが拡張された
アナログ入力(シングルエンド)が延長した
アナログ入力(差動またはシングルエンドの ) 延長した
アナログ電圧出力を既に拡張
温度入力をこれは、延長された
SSIが展開されました
次のようにコントローラの仕様は以下のとおりです。
寸法高さ×幅×奥行き[mm]で120×270×100
重量[G] 1266
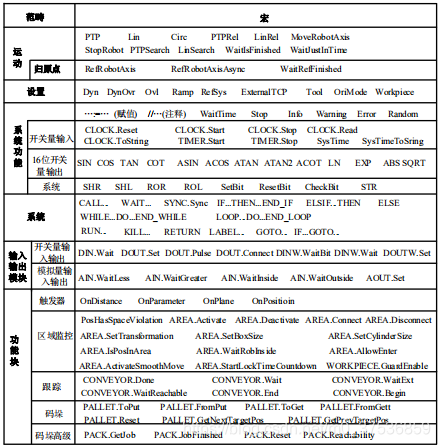

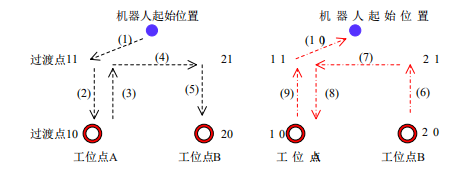
図1は、作業部位A用にステーションサイトBから配置されている図2のワークサイトBにステーション点Aから配置されている
注:このシステムは、制御モード位置に基づいている規格を統一するために、遷移点を示すために、フォームのIJを用いて
位置を行列。
Step 3:预定义“搬运”程序变量
(1)新建程序,示教器→主菜单→文件→新建项目:项目名称(PickOne)→新
西安工程大学工业机器人实验参考资料(内部资料)
14
建程序:程序名称(main) 。
(2)新建子程序,文件→新建程序:程序名称(Pick);文件→新建程序:程
序名称(PickReturn) 。
(3)定义位置变量:
示教器→主菜单→变量→变量监测【注:禁止建立全局变量,慎用】→
项目[PickOne] →变量→新建→位置→变量:CARTPOS→名称:XPUDot10 →确定。
项目[PickOne] →变量→新建→位置→变量:CARTPOS→名称:XPUDot11
→确定。
项目[PickOne] →变量→新建→位置→变量:CARTPOS→名称:XPUDot20
→确定。
项目[PickOne] →变量→新建→位置→变量:CARTPOS→名称:XPUDot21
→确定。
项目[PickOne] →变量→新建→位置→变量:CARTPOS→名称:XPUHome
→确定。
(4)定义速度变量:
项目[PickOne] →变量→新建→动力学及重叠优化→变量:DYNAMIC→名称:
XPUSpeed →确定。
(5)定义气阀开合变量:
项目[PickOne] →变量→新建→输入输出模块→变量:DOUT→名称:
XPUOpenClose →确定。
Step4:变量与输入输出关联。
(1) 关 联 气 阀 开 合 变 量 : 监 测 → 变 量 → 检 测 变 量 → 选 中
XPUOpenClose(Port:MAPTO BOOL: IoDOut→键盘:输入 0)。
(2)编写“搬运”代码。
Step 5: 编写“搬运”程序 main 函数:
主菜单→项目→PickOne →main →加载
→新建→系统:LABLE(命名:XPULoop) 【注意:第一个“编辑”是修改指
令】
→新建→运动:PTP(pos:POSITON_ (XPUHome)、dyn:DYNAMIC_(XPUSpeed))
→确认
→新建→系统功能:WaitTime(500) →确认 【时间单位:ms】
→新建→系统:CALL →程序:Pick→确认 【从工位点 1 移动到工位点 2】
→新建→系统功能:WaiTTime(500) →确认
→新建→系统:KILL →程序:Pick→确认
西安工程大学工业机器人实验参考资料(内部资料)
15
→新建→运动:WaitIsFinished() →确认 【防止自动预读执行后续程序】
→新建→系统:CALL →程序:PickReturn→确认 【从工位点 2 移动到工
位点 1】
→新建→系统功能:WaitTime(500) →确认
→新建→系统:KILL →程序:PickReturn→确认
→新建→运动:PTP(pos:POSITON_ (XPUHome)、dyn:DYNAMIC_(XPUSpeed))
→确认【回到原点】
→新建→系统功能:WaitTime(3000) →确认
→新建→系统:GOTO(XPULoop) →确认
Step 6:编写 Pick 子函数:
. 主菜单→项目→PickOne →Pick →加载
【变量赋值】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot11→确
认→更换赋值量→替换→变量→XPUDot10→确定。【工位点 10 值赋给 11】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot11:z
→确认→更换赋值量→替换→变量→XPUDot10:z→新增+→替换→键盘→150→
确定。【给工位点 11 的 z 轴赋值】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot21→确
认→更换赋值量→替换→变量→XPUDot20→确定。【工位点 20 值赋给 21】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot21:z
→确认→更换赋值量→替换→变量→XPUDot20:z→新增+→替换→键盘→150→
确定。【给工位点 21 的 z 轴赋值】
【从工位点 11 移动到工位点 10】
→新建→运动:WaitIsFinished() →确认 【防止自动预读执行后续程序】
→新建→运动:Lin(XPUDot11,XPUSpeed) →确认
→新建→运动:Lin(XPUDot10,XPUSpeed) →确认
→新建→运动:WaitIsFinished() →确认 【防止自动预读执行后续程序】
【气阀闭合】
→新建→开关量输入输出:DOUT:Set(DOUT:XPUOpenClose,value:BOOL(TRUE) )
→确认
→新建→系统功能:WaitTime(300) →确认
→新建→运动:WaitIsFinished() →确认 【防止自动预读执行后续程序】
【从工位点 10 移动到工位点 11】
→新建→运动:Lin(XPUDot11,XPUSpeed) →确认
西安工程大学工业机器人实验参考资料(内部资料)
16
【从工位点 11 移动到工位点 21】
→新建→运动:Lin(XPUDot21,XPUSpeed) →确认
【从工位点 21 移动到工位点 20】
→新建→运动:Lin(XPUDot20,XPUSpeed) →确认
→新建→运动:WaitIsFinished() →确认
【气阀开启】
→新建→开关量输入输
出:DOUT:Set(DOUT:XPUOpenClose,value:BOOL(FALSE) ) →确认
→新建→系统功能:WaitTime(300) →确认
【从工位点 20 移动到工位点 21】
→新建→运动:Lin(XPUDot21,XPUSpeed) →确认
Step 7:编写 PickReture 子函数:
. 主菜单→项目→PickOne →PickReturn →加载
【变量赋值】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot11→确
认→更换赋值量→替换→变量→XPUDot10→确定。【XPUDot11:=XPUDot10;工位
点 10 值赋给 11】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot11:z
→确认→更换赋值量→替换→变量→XPUDot10:z→新增+→替换→键盘→150→
确定。【XPUDot11.z:=XPUDot10.z+150;给工位点 11 的 z 轴赋值】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot21→确
认→更换赋值量→替换→变量→XPUDot20→确定。【XPUDot21:=XPUDot20;工位
点 20 值赋给 21】
→新建→系统功能: … := …(赋值)→更改→项目[PickOne] →XPUDot21:z
→确认→更换赋值量→替换→变量→XPUDot20:z→新增+→替换→键盘→150→
确定。【XPUDot21.z:=XPUDot20.z+150;给工位点 21 的 z 轴赋值】
→新建→运动:WaitIsFinished() →确认 【防止自动预读执行后续程序】
【气阀开启】
→ 新 建 → 开 关 量 输 入 输
出:DOUT:Set(DOUT:XPUOpenClose,value:BOOL(FALSE) ) →确认
→新建→运动:Lin(XPUDot21,XPUSpeed) →确认
→新建→运动:Lin(XPUDot20,XPUSpeed) →确认
→新建→运动:WaitIsFinished() →确认 【防止自动预读执行后续程序】
【气阀闭合】
西安工程大学工业机器人实验参考资料(内部资料)
17
→新建→开关量输入输出:DOUT:Set(DOUT:XPUOpenClose,value:BOOL(TRUE) )
→确认
→新建→系统功能:WaitTime(300) →确认
→新建→运动:Lin(XPUDot21,XPUSpeed) →确认
→新建→运动:Lin(XPUDot11,XPUSpeed) →确认
→新建→运动:Lin(XPUDot10,XPUSpeed) →确认
→新建→运动:WaitIsFinished() →确认
【气阀开启】
→ 新 建 → 开 关 量 输 入 输
出:DOUT:Set(DOUT:XPUOpenClose,value:BOOL(FALSE) ) →确认
→新建→系统功能:WaitTime(300) →确认
→新建→运动:WaitIsFinished() →确认
→新建→运动:Lin(XPUDot11,XPUSpeed) →确认
Step 8:实例化对象(即示教):
. 主菜单→PickOne→加载→main→加载→示教器上“★”→STEP 模式。
【实例化 XPUHome 点】
手动上伺服【钥匙要旋至最左端】→将各个关节旋转到适合工艺需求的位置
→光标选中 PTP(XPUHome,XPUSpeed)→设置 PC→编辑【示教器第一个编辑】→示
教。
→Start+伺服→ Pick→Lin(XPUDot11) →切换直角坐标系【Jog 模式→“★”
切换到直角坐标系位置,即 X,Y,Z,A,B,C】 →返回 Step 模式→示教器 Start→
利用手柄调整到 XPUDot11 点【注意:设计过程中技巧问题 1 先调整工位 10 的
位置;2 设置 PC→赋值语句即可】。
运行“搬运”程序
主菜单→项目→PickOne→加载→钥匙旋至中间档位,即自动挡→上伺服 示
教器上 PWR
附录:参考代码
main 函数代码:
LABEL XPULoop
西安工程大学工业机器人实验参考资料(内部资料)
18
PTP(XPUHome, XPUSpeed)
WaitTime(500)
CALL pick()
WaitTime(500)
KILL pick
WaitIsFinished()
CALL pickreturn()
WaitTime(500)
KILL pickreturn
PTP(XPUHome, XPUSpeed)
WaitTime(3000)
GOTO XPULoop
PickOne 函数代码:
XPU11 := XPU10
XPU11.z := XPU10.z + 150
XPU21 := XPU20
XPU21.z := XPU20.z + 150
WaitIsFinished()
Lin(XPU11)
Lin(XPU10, XPUSpeed)
WaitIsFinished()
XPUOpenClose.Set(TRUE)
WaitTime(300)
WaitIsFinished()
Lin(XPU11, XPUSpeed)
Lin(XPU21)
Lin(XPU20)
WaitIsFinished()
XPUOpenClose.Set(FALSE)
WaitTime(300)
Lin(XPU21)
PickReturn 函数代码:
XPU11 := XPU10
XPU11.z := XPU10.z + 150
西安工程大学工业机器人实验参考资料(内部资料)
19
XPU21 := XPU20
XPU21.z := XPU20.z + 150
WaitIsFinished()
XPUOpenClose.Set(FALSE)
Lin(XPU21)
Lin(XPU20)
WaitIsFinished()
XPUOpenClose.Set(TRUE)
WaitTime(300)
Lin(XPU21)
Lin(XPU11)
Lin(XPU10)
WaitIsFinished()
XPUOpenClose.Set(FALSE)
WaitTime(300)
WaitIsFinished()
Lin(XPU11)
概要:劉は、私は再び一部を抽出し、この実験のガイド本を書きました。
ハンズオンを通じて、より多くのステップや開発プロセスにおける産業用ロボットの使用について学びます。劉さんはまた、知識と能力との関係について話した実験の過程で説明し、さらに実際の生産のために練習する方法を学びました精緻化。その後、小型ながら、それは一般的な使用の意味が含まれています。
プログラミングプロセスを通じて、プログラミング、連続試運転を続け、常に最初のプロセスからの背後に働いて彼のチームを見て、いくつかの問題があった、問題も異なっています。私たちは......、リブートにあるプログラムのほとんどを扱う、全体の実験は2日間続きました。産業用ロボットから、教師が尋ね達成するための転送アクションについて何も知りません。同じバグがまだ解決されていない次の朝は、チームリーダーの別のメンバーとしてだけでなく、次の3私はまだデバッグで、昼食を食べていませんでした。夜01時、他のチームメンバーは、我々はまだ試運転され、ビデオの最後のショットを完了するために取り組んで忙しいです。
アイデアの副ヘッドは、ロボット命令で解決策を見つけます。
我々は、ロボットアームが姿勢変更時位置Aから位置Bに回動さ無視し、したがってモードは、プログラミング中に変更されます。
この補正後、ロボットの正常な動作は、アクションを滑らかに。
リーダーは、言った、「ない心配、科学的精神がなければならない」
母!
8時14分に2019.1.11--16願い
(図は、あまりにも、恥ずかしい移動しません!)
