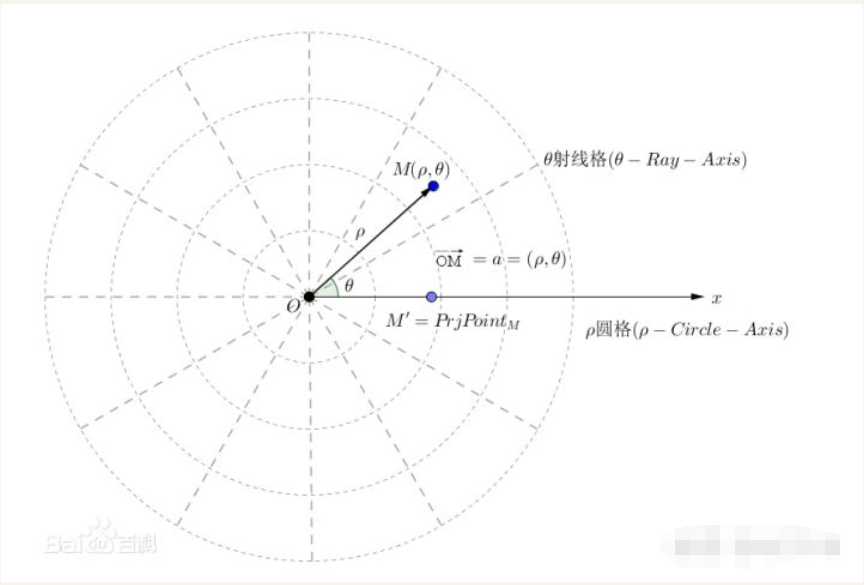
1.極座標での第一印象は何ですか
ポール:円の中心の極O、
ポーラー:レイ極性リードの方向に0° Ox、
電極径:選択されたユニットの長さr
極角:でOx角度を計算開始正方向θ(通常は反時計方向で撮影)
ポールは:極性O極性日に中心として、Ox出発点として方向、極半径をr描く半径、極角としてθセクタを、コンパス脚部の最終位置を極座標で与えられますM
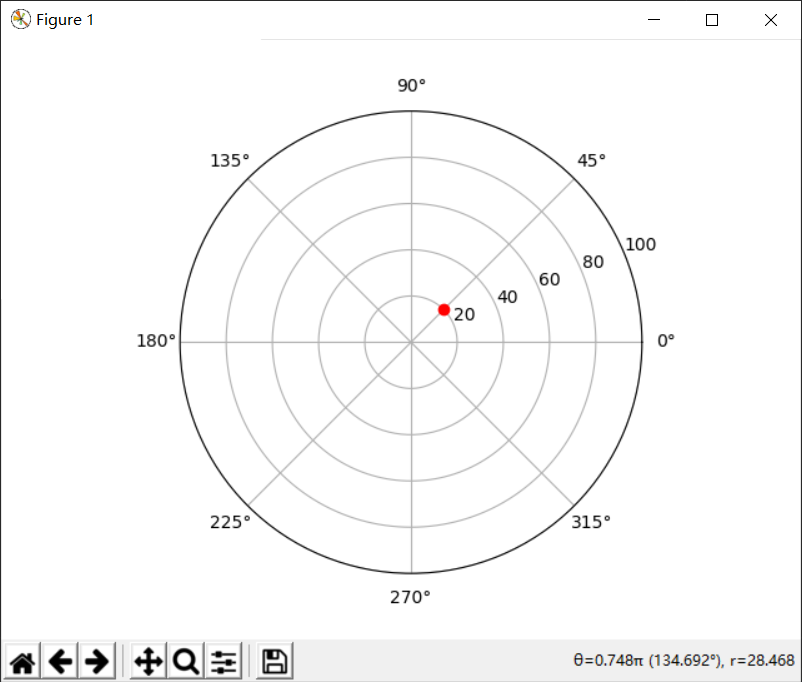
2. matplotlibのを使用してポイントを描画
輸入PLTのようmatplotlib.pyplot 輸入NPとしてnumpyの 「」」 20:半径20 YLimプロパティ(0100):極性の設定範囲 LW = 2:極性パターン幅を示し RO:極性は赤のドットのグラフィック描画座標 「」」 plt.polar( 0.25 * np.pi、20、" RO "、LW = 2 ) plt.ylim(0、 100 ) plt.show()
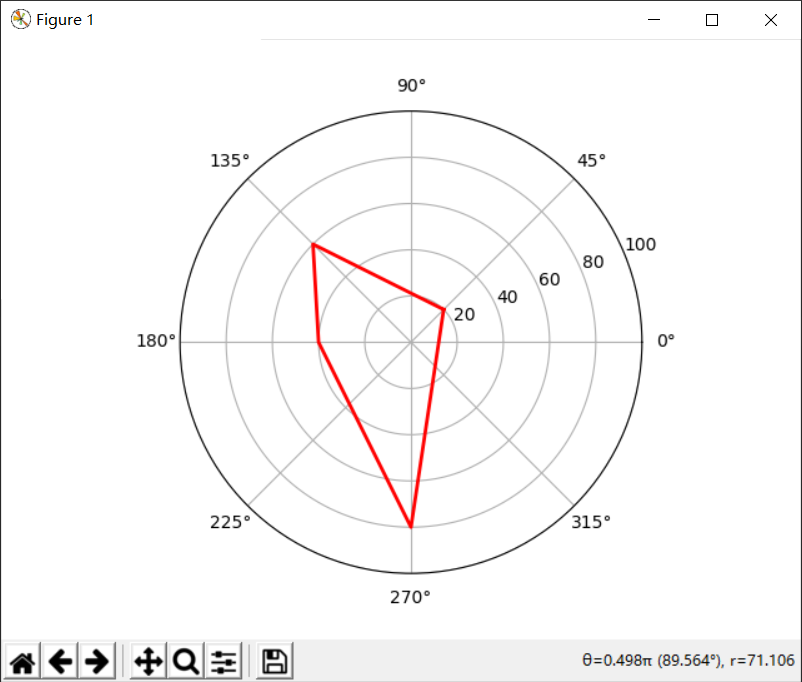
3点の使用matplotlibの動画複数の閉パターンに接続されています
輸入PLTのようmatplotlib.pyplot 輸入NPとしてnumpyの 「」」 それ閉パターン作り、複数の点と最初の点と同一の最後の点を描画します 「」」 シータ = np.array([0.25,0.75,1,1.5,0.25 ]) R = [20,60,40,80,20 ] plt.polar(シータ * np.pi、R、" R- "、LW = 2 ) plt.ylim(0、 100 ) plt.show()
4.塗りつぶしの色
輸入PLTのようmatplotlib.pyplot 輸入NPとしてnumpyの #使用ggplotの描画スタイルの plt.style.use(' ggplot ' ) #の建設角値 シータ= np.array([0.25,0.75,1,1.5,0.25を]) R = [20,60,40,80,20 ] plt.polar(シータ * np.pi、R、" R- "、LW = 1 ) #は、塗りつぶしの色、及び透明度0.75に設定 plt.fill(シータnp.pi *、R&LT、' R&LT '、アルファ= 0.75 ) plt.ylim(0、 100 ) #の表示グリッド線 plt.grid(真) plt.show()

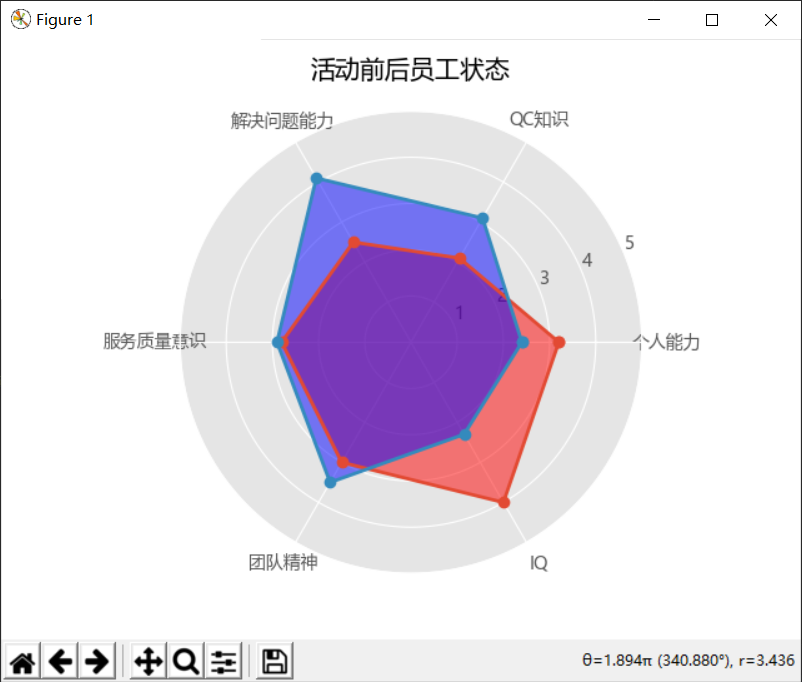
図5のレーダデータを複数描きます。
インポートのNPとしてnumpyの 輸入PLTとしてmatplotlib.pyplot #ノーマル中国と負の符号表示 plt.rcParams [ ' font.sans serif- ' ] = ' 微軟雅黒' plt.rcParams [ ' axes.unicode_minusは' ] = 偽 #使用ggplotスタイルの描画 plt.style.use(' ggplot ' ) #の構成データ 値= [3.2,2.1,3.5,2.8,3,4 ] values_1 = 2.4,3.1,4.1,1.9,3.5,2.3 ] 特集 = [ 「個人の能力」、「QCの知識」、「問題解決」、「サービスの認知度の品質」、「チームワーク」、「IQ 」] N = LEN(値) #は、平面二等分カットのために、レーダーチャートの角度を設定 角度np.linspace =(0,2 * np.pi、N、エンドポイント= 偽) #レーダ図クローズアップ 値= np.concatenate((値は、[値[0]))を 角度 = np.concatenate((角度、[角度[0])) values_1 = np.concatenate((values_1、[values_1 [0])) #描画 図= plt.figure() #を極座標形式に AX = fig.add_subplot(111、極性= TRUE) #1 線グラフ 斧。プロット(アングル、値が、' O- '、線幅= 2、ラベルなど= ' 前' ) ax.fill(角度値、' R '、アルファ= 0.5 ) #色塗りつぶし (アングル、values_1、ax.plotを' O- '、線幅= 2、ラベルなど= ' イベントの後に' ) ax.fill(角度、values_1、' B '、アルファ= 0.5 ) #は、各形質のラベルを追加する (180 [アングル* / ax.set_thetagrids np.pi、フィーチャ) #セット極性範囲 ax.set_ylim(0,5 ) #ヘッダ追加 plt.title(' 縦アクティブ状態の従業員' ) #の増加をグリッド紙 ax.grid(真) plt.show()