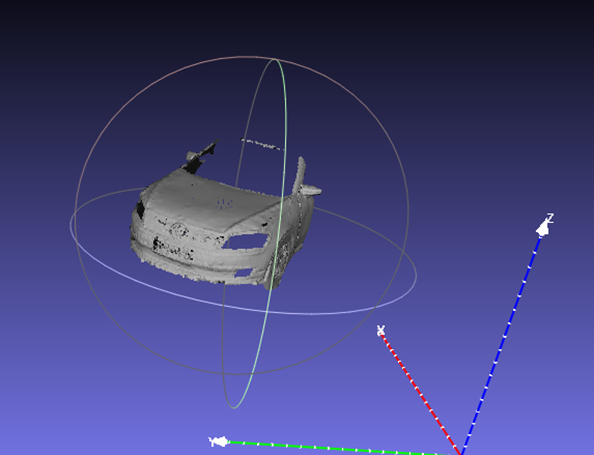
1.インポートファイルMeshLab 2点雲、位置差。ツールバーボタンの整列登録をクリックして、その後、合わせツール]ダイアログボックスが表示されます。第一の基準点群を選択し、基準点クラウドは、ポイントクラウドの良い名前はアスタリスクの前に表示される選択し、ボックスになるように、メッシュここでのりをクリックします。下図のように:

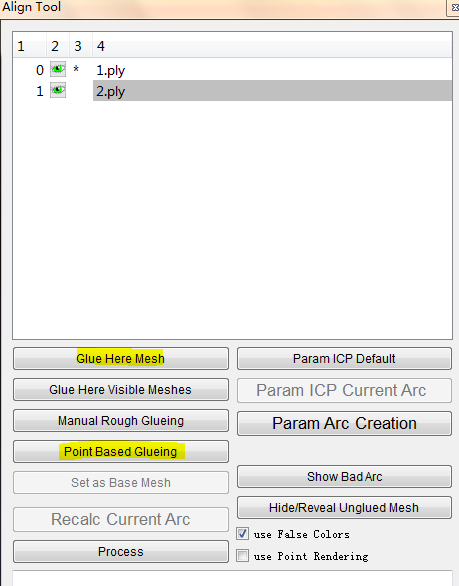
2.別の曇点を選択した後、好ましくは、点の少なくとも4つのペアが[OK]をクリックし、ポイントベース糊付け、手動マッチング点選択された二点群をクリック。、選択の選択肢を排除するためにCtrlキーをダブルクリックを押したままマウスの左ボタンをダブルクリックします。
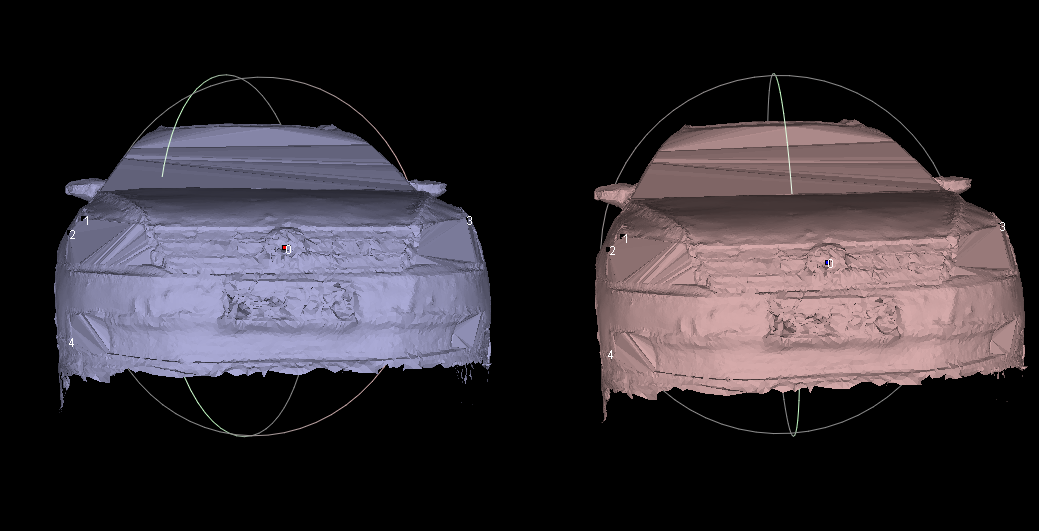
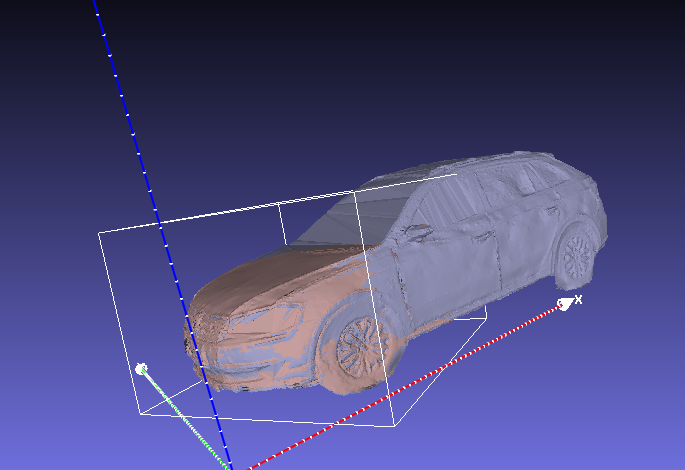
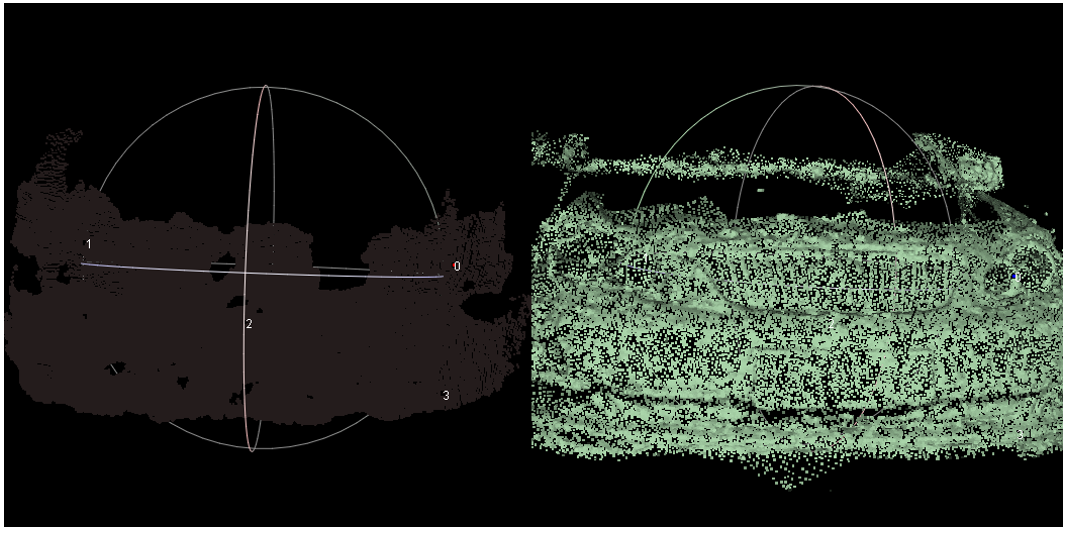
3.実行した後、2点群は、実質的に一緒に一致すると、名前の曇り点の前に第2のブロックはまた、アスタリスクを表示されます。:(示すように、ピンク、紫点曇点クラウドオーバーラップ)
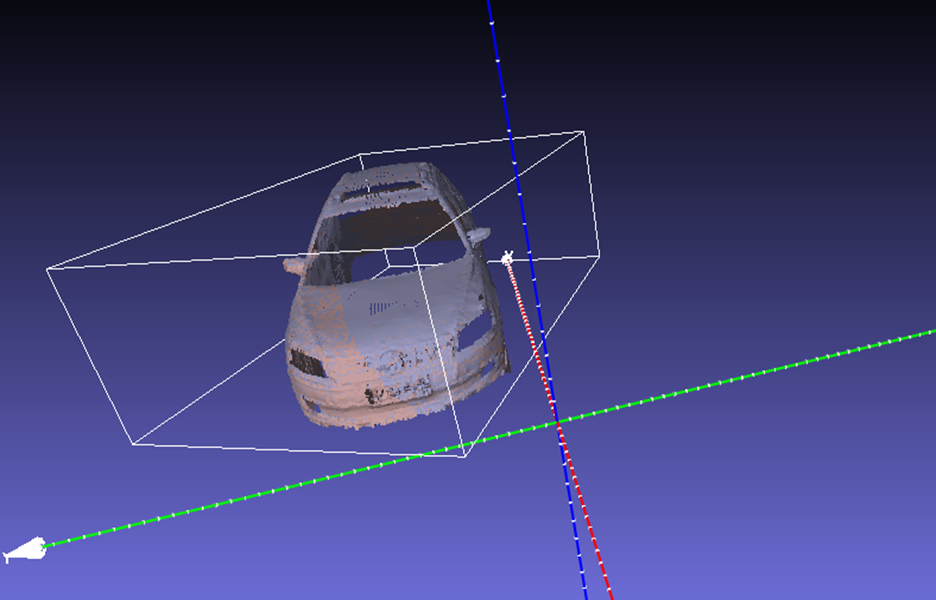
4.初期登録、ICPの登録後、デフォルトのパラメータは、必要に応じて変更され、ParamのICPデフォルトで指摘しました。同じサイズの我々の2つのポイントクラウド場合は、選択に一致するリジッドチェックします。私たちは、最終的な変換行列は、スケーリング係数を持つことを確認していない場合。プロセス・ソフトウェアをクリックした後、自動的に計算を開始
- 采样点数目(サンプル番号):これは、他のメッシュに比較するために、各メッシュからプルサンプルの数です。あなたは、この数が大きすぎるしたくありません。小さなサンプルは、一般的にも静かに動作します。5,000 1,000通常は十分です。
- Minimal starting distance:this ignores any samples that are outside of this range. Typically for a manually aligned object you want this to be large enough to encompass your 'point picking' error. A value of 5 or 10 (in millimeters) is usually a good start. Once the initial alignements are complete, drop it down to 1mm to 'fine tune'
- Target distance(相当于均方误差mse):an average alignment error value that the software will try to obtain from the process
- 最大迭代次数(Max iteration number):the maximum number of iterations that the software will perform。
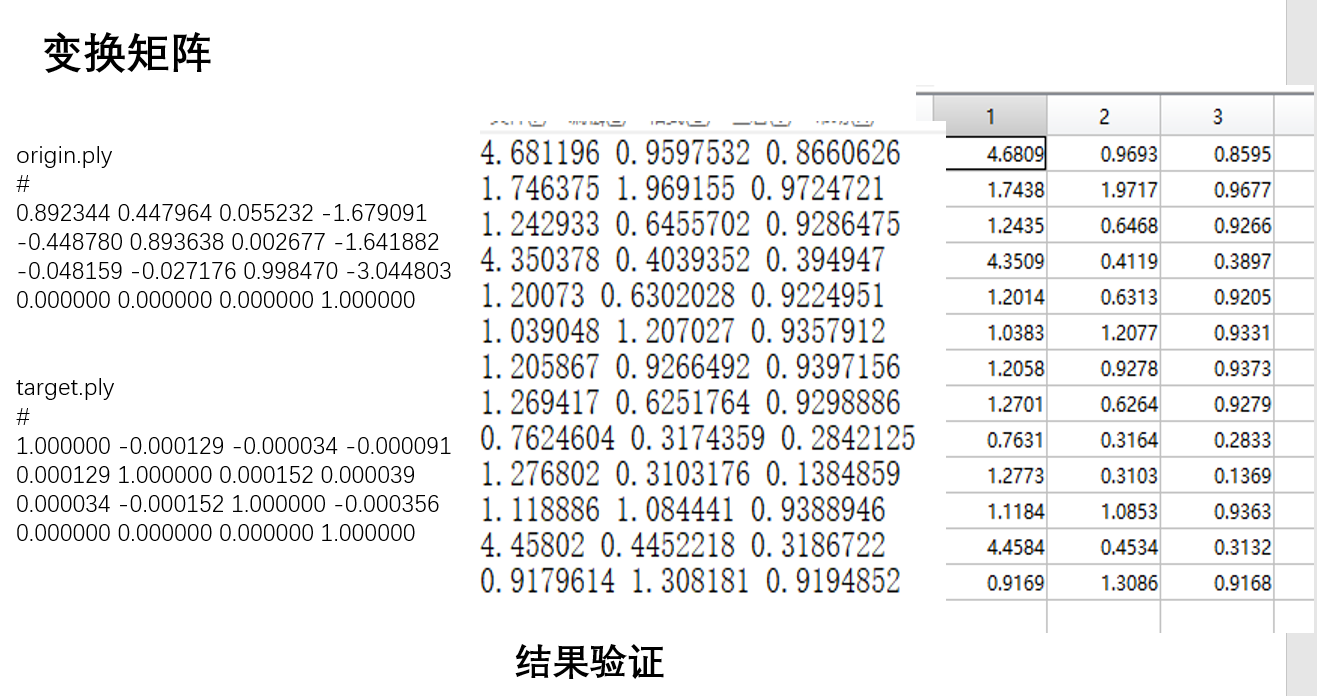
5. 变换矩阵与结果验证
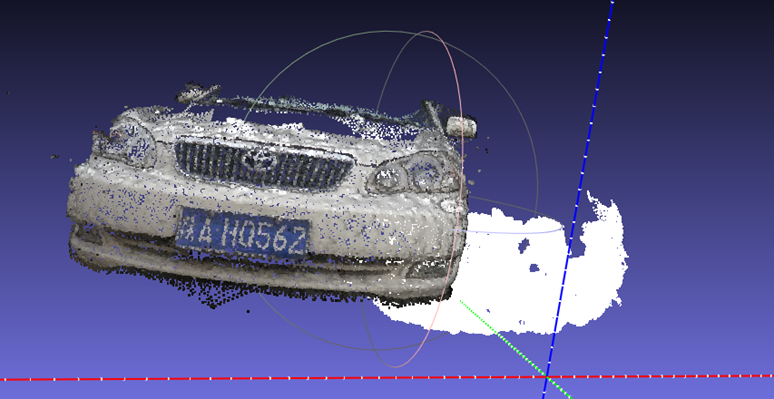
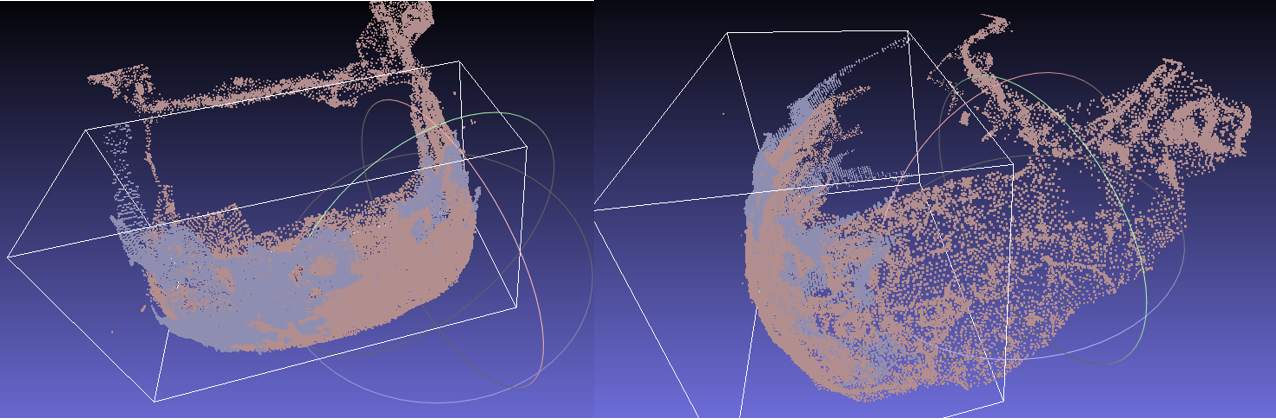
6. 点云规模不一致情况下实验
(1)

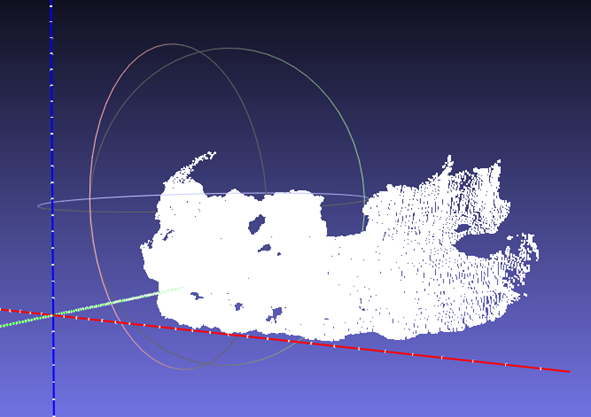
(2)
参考:https://blog.csdn.net/eric_e/article/details/80664042