説明する
モデルの由来: LaneNet モデル
環境 pycharm
1. データの準備
図に示すように、処理されたデータを変更されたモデルに配置します。
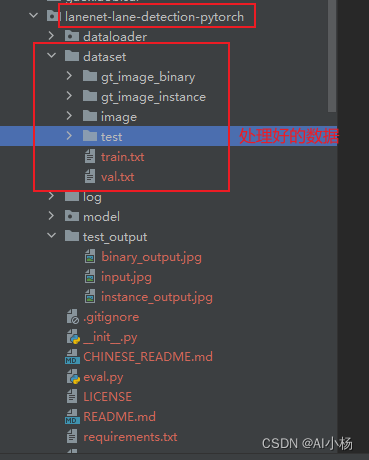
注: データ処理方法については、以前のブログを参照してください: tusimple データ セット処理
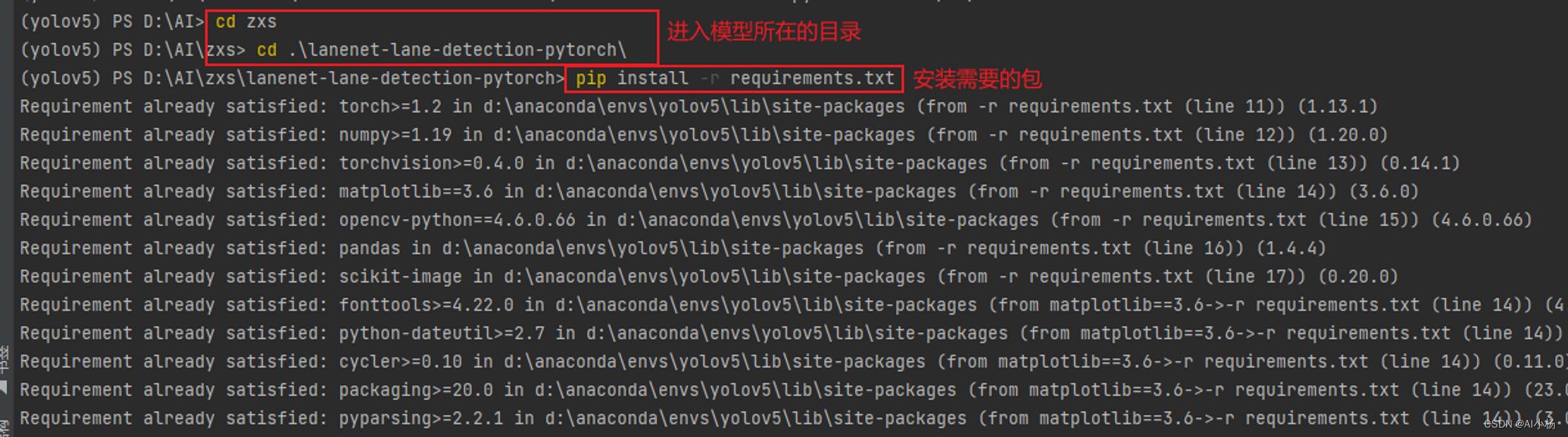
2. 環境構築
モデルのパスを入力し、依存関係パッケージをインストールして、pycharm ターミナルに次のように入力します。
pip install -r requirements.txt
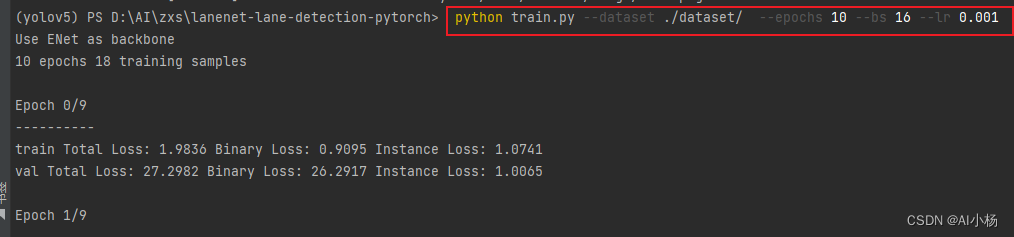
3. モデルのトレーニング
モデルのトレーニング:
python train.py --dataset ./data/dataset/ --epochs 10 --bs 16 --lr 0.001
オプションのパラメータ:
–dataset: データセットのパス
–epochs: トレーニング エポック (デフォルト 25)
–lr: 学習率 (デフォルト 0.0001)
–bs: バッチ ファイルの数 (デフォルト 4)
注: 時間を節約するために、10 ホイールのみをトレーニングします
- スクリーンショットを実行する
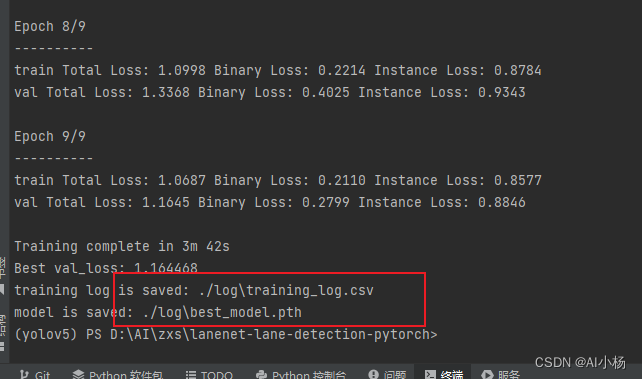
操作が完了すると、最後の 2 行でトレーニング結果を保存するパスがフィードバックされ、結果は現在のディレクトリのログ フォルダーに保存されます。
4. モデルの評価
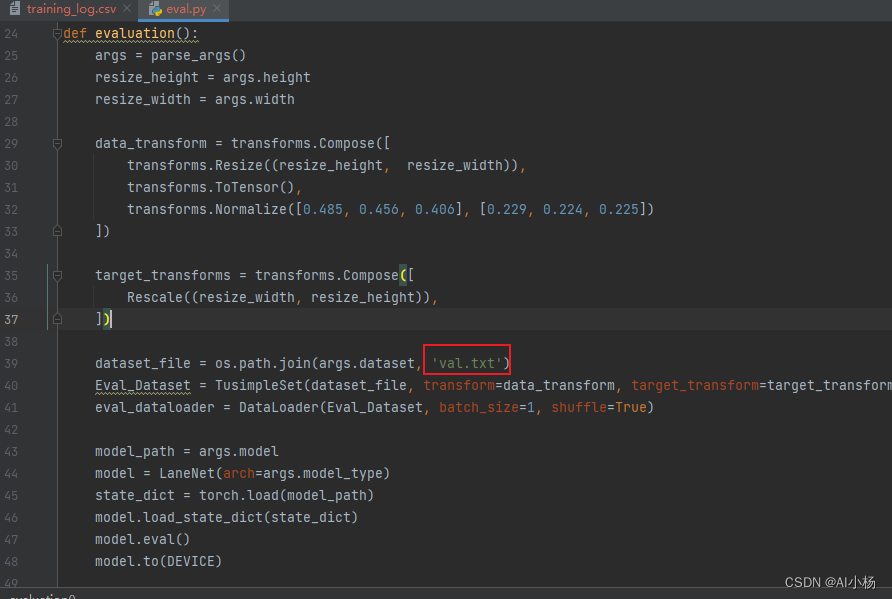
- 構成ファイルを変更します。
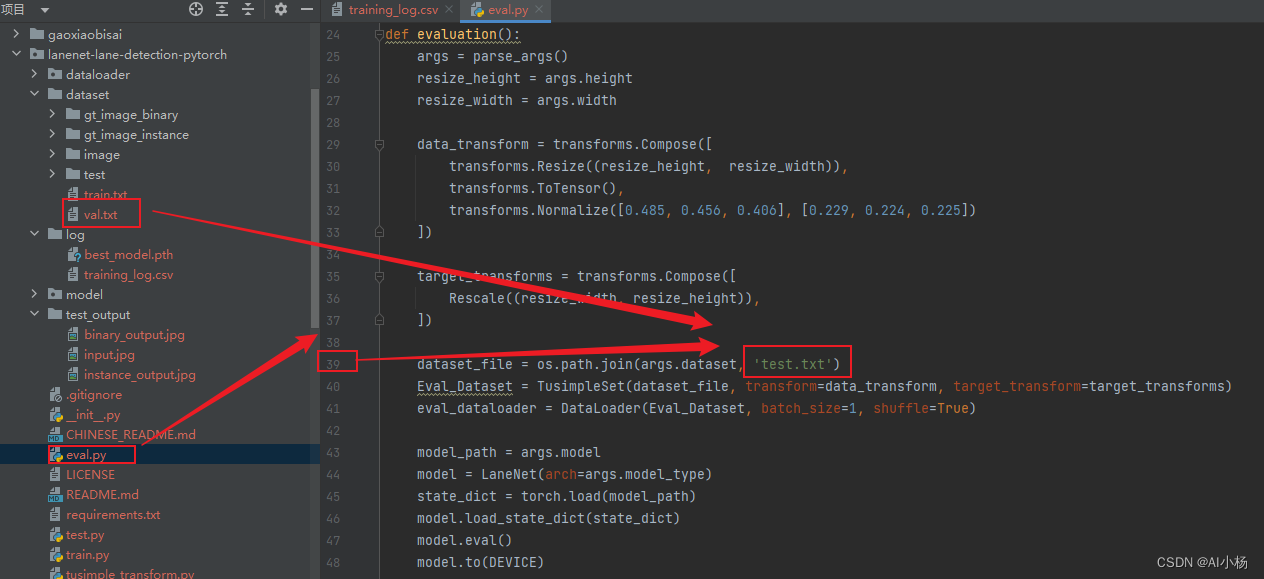
データ セットを処理するときにテスト セットに val.txt という名前を付けたので、次のように、モデルの現在のディレクトリにある eval.py ファイルの 39 行目の test.txt を val.txt に置き換える必要があります。写真:
- モデルの評価
python eval.py --dataset ./dataset/
- 実行中のスクリーンショット注: 私のデータ セットには 12 枚の写真しかなく、トレーニング回数が非常に少ないため、スコアが非常に低いため、スコアが非常に低い

理由は尋ねないでください。ここでの実験はレーンを実証するためだけです。
LaneNet モデルのライン検出実装 節約するためにトレーニング回数とデータ処理に何気なく費やされる時間。
5. モデル予測
python test.py --img ./dataset/test/0004.png
- スクリーンショットを実行する

- 実行結果 結果
は、現在のディレクトリの test_output フォルダーに保存されます。
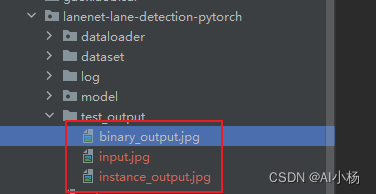
3 つの写真の効果は次のとおりです。 効果が
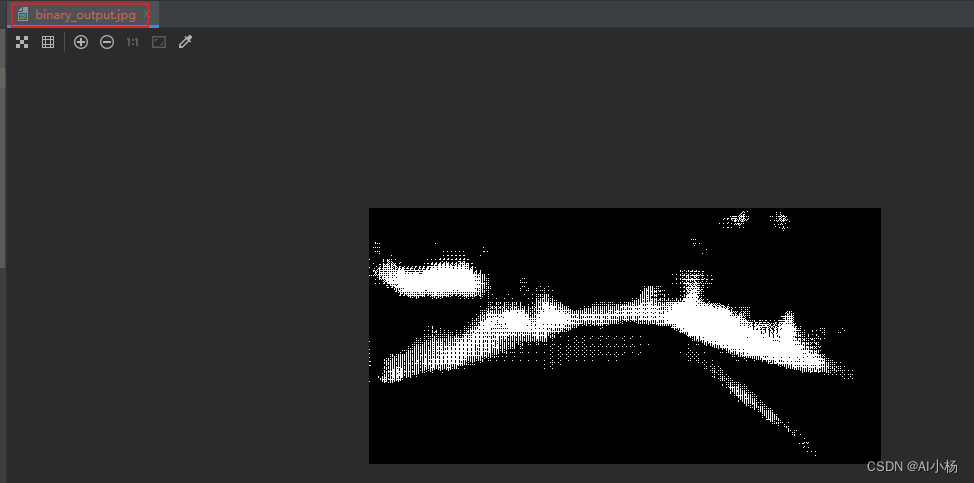
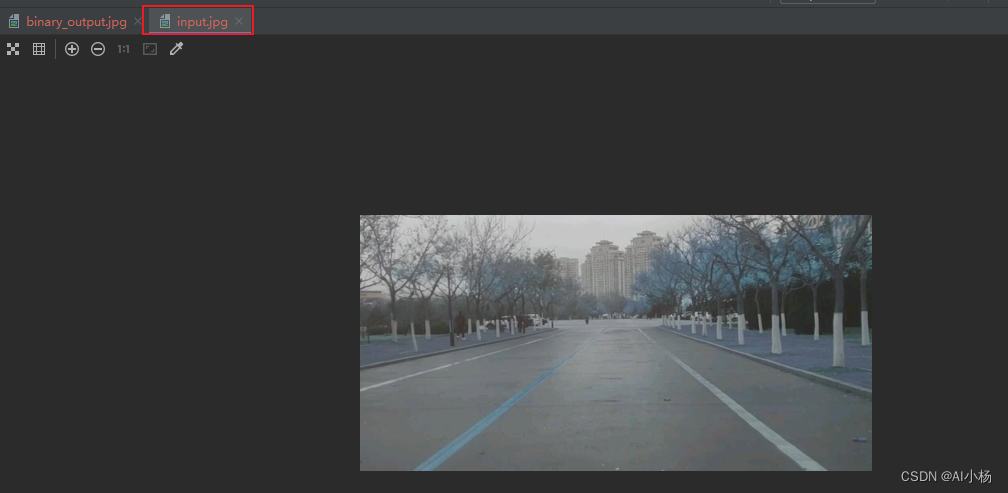
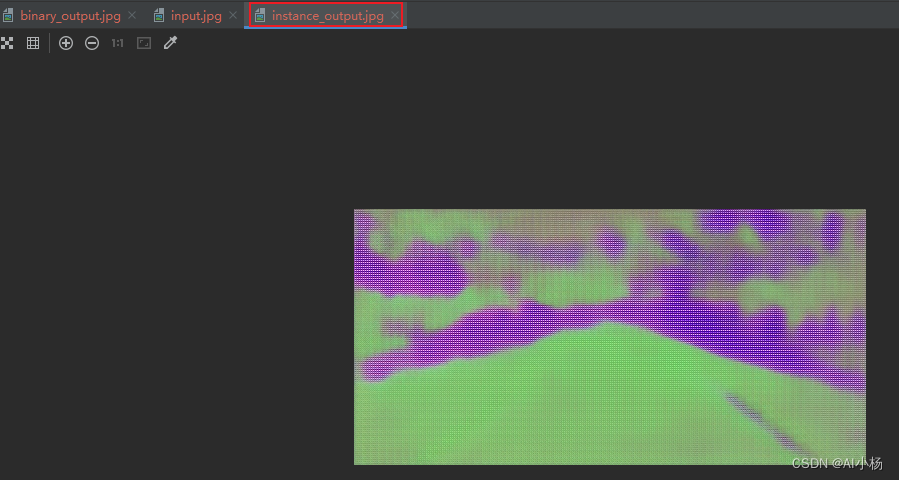
低い理由: データが少なく、トレーニングも少ない (忙しいスケジュールの合間を縫って、皆さんにおざなりに説明しただけです) 、ご覧いただきありがとうございます)。