畳み込みニューラル ネットワークを構築する
- 畳み込みネットワークの入力と層は従来のニューラル ネットワークとは多少異なるため、再設計する必要がありますが、トレーニング モジュールは基本的に同じです
完全に接続されたレイヤー: バッチ784、各ピクセル間に接続はありません。
畳み込み層: バッチ1 28 28、各ピクセル間に接続があります。
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torchvision import datasets,transforms
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
まずはデータを読み込む
- トレーニング セットとテスト セット (検証セット) を個別に構築する
- データを繰り返しフェッチする DataLoader
# 定义超参数
input_size = 28 #图像的总尺寸28*28
num_classes = 10 #标签的种类数
num_epochs = 3 #训练的总循环周期
batch_size = 64 #一个撮(批次)的大小,64张图片
# 训练集
train_dataset = datasets.MNIST(root='./data',
train=True,
transform=transforms.ToTensor(),
download=True)
# 测试集
test_dataset = datasets.MNIST(root='./data',
train=False,
transform=transforms.ToTensor())
# 构建batch数据
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=batch_size,
shuffle=True)
畳み込みネットワークモジュールの構築
- 一般的な畳み込み層、relu層、プーリング層をパッケージとして記述可能
- 畳み込みの最終結果は依然として特徴マップであることに注意してください。分類または回帰タスクを実行するには、これをベクトルに変換する必要があります。
画像は2次元のコンボリューション conv2
動画は3次元のコンボリューション conv3
単一ベクトルは1次元のコンボリューション conv1
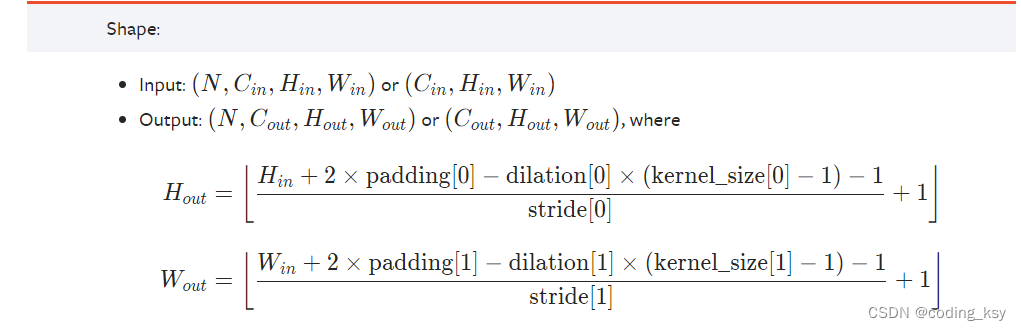
公式サイト conv2dの出力幅と長さの計算式
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Sequential( # 输入大小 (1, 28, 28)
nn.Conv2d(
in_channels=1, # 1:灰度图;3:RGB
out_channels=16, # 要得到几多少个特征图,即是卷积核的个数
kernel_size=5, # 卷积核大小
stride=1, # 步长
padding=2, # 如果希望卷积后大小跟原来一样,需要设置padding=(kernel_size-1)/2 if stride=1
), # 输出的特征图为 (16, 28, 28)
nn.ReLU(), # relu层
nn.MaxPool2d(kernel_size=2), # 进行池化操作(2x2 区域), 输出结果为: (16, 14, 14)
)
self.conv2 = nn.Sequential( # 下一个套餐的输入 (16, 14, 14)
nn.Conv2d(16, 32, 5, 1, 2), # 输出 (32, 14, 14)
nn.ReLU(), # relu层
nn.Conv2d(32, 32, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(2), # 输出 (32, 7, 7)
)
self.conv3 = nn.Sequential( # 下一个套餐的输入 (32, 7, 7)
nn.Conv2d(32, 64, 5, 1, 2), # 输出 (64, 7, 7)
nn.ReLU(), # 输出 (64, 7, 7)
)
self.out = nn.Linear(64 * 7 * 7, 10) # 全连接层得到的结果
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
x = x.view(x.size(0), -1) # flatten操作,结果为:(batch_size, 64 * 7 * 7)
output = self.out(x)
return output
評価基準としての精度
def accuracy(predictions, labels):
pred = torch.max(predictions.data, 1)[1]
rights = pred.eq(labels.data.view_as(pred)).sum()
return rights, len(labels)
ネットワークモデルをトレーニングする
# 实例化
net = CNN()
#损失函数
criterion = nn.CrossEntropyLoss()
#优化器
optimizer = optim.Adam(net.parameters(), lr=0.001) #定义优化器,普通的随机梯度下降算法
#开始训练循环
for epoch in range(num_epochs):
#当前epoch的结果保存下来
train_rights = []
for batch_idx, (data, target) in enumerate(train_loader): #针对容器中的每一个批进行循环
net.train()
output = net(data)
loss = criterion(output, target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
right = accuracy(output, target)
train_rights.append(right)
if batch_idx % 100 == 0:
net.eval()
val_rights = []
for (data, target) in test_loader:
output = net(data)
right = accuracy(output, target)
val_rights.append(right)
#准确率计算
train_r = (sum([tup[0] for tup in train_rights]), sum([tup[1] for tup in train_rights]))
val_r = (sum([tup[0] for tup in val_rights]), sum([tup[1] for tup in val_rights]))
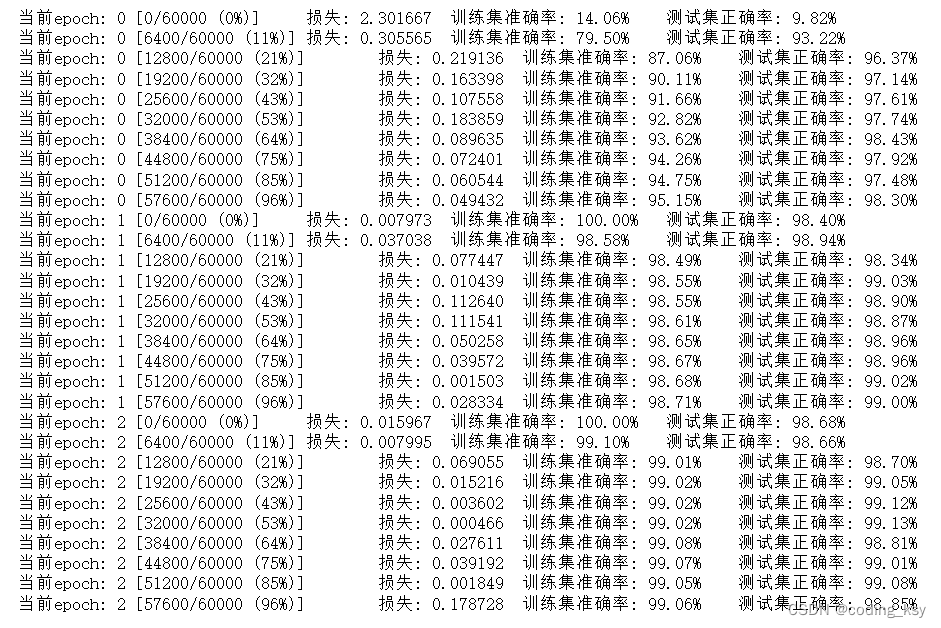
print('当前epoch: {} [{}/{} ({:.0f}%)]\t损失: {:.6f}\t训练集准确率: {:.2f}%\t测试集正确率: {:.2f}%'.format(
epoch, batch_idx * batch_size, len(train_loader.dataset),
100. * batch_idx / len(train_loader),
loss.data,
100. * train_r[0].numpy() / train_r[1],
100. * val_r[0].numpy() / val_r[1]))
練習する
- 畳み込みのレイヤーをさらに追加します。その効果は何ですか?
- 現在のタスクに全結合層があるのはなぜですか 32 7 7 各数字は何を表しますか?