視覚ナビゲーション システムは環境に敏感で、照明の変化、繰り返されるテクスチャ、動的オブジェクトなどの影響を受けますが、慣性ナビゲーション システム (INS) は完全に自律的に動作し、外部環境の影響を受けず、継続的かつ高頻度の自律ナビゲーションを実現できますが、誤差はすぐに発散します。この 2 つを組み合わせると、相互に補完して視覚慣性航法システム (VINS) を形成できます。しかし、既存の VINS では視覚が主導的な役割を果たすことが多く、INS の利点が十分に活用されておらず、複雑な環境におけるナビゲーション システムの堅牢性の期待に応えることができません。我々は、INSをコアとしたGNSS-Visual-INS統合ナビゲーションシステム(IC-GVINS)を提案します。これは、大規模で複雑な環境においてシステムの絶対測位精度とロバスト性を効果的に向上させることができます。
視覚慣性航法システム (VINS) は高精度で比較的低コストであり、無人車両やロボットの自律航法に広く使用されています。ただし、ビジョン システムは、照明の変化や動的オブジェクトなどの影響を非常に受けやすく、パフォーマンスの低下につながります。慣性航法システム(INS)は外部環境の影響を受けず、継続的な自律航行を実現します。同時に、産業グレードの微小電気機械システム (MEMS) 慣性測定ユニット (IMU) は、明らかなコスト上の利点と相まって、高い短期精度を備え、準戦術レベルに達しており、使用が増加しています。INS の利点を最大限に発揮するために、複雑な環境におけるナビゲーションと測位の精度と堅牢性を向上させるために、INS を核とした GNSS-Visual-INS 統合ナビゲーション システム IC-GVINS [1] を提案します。
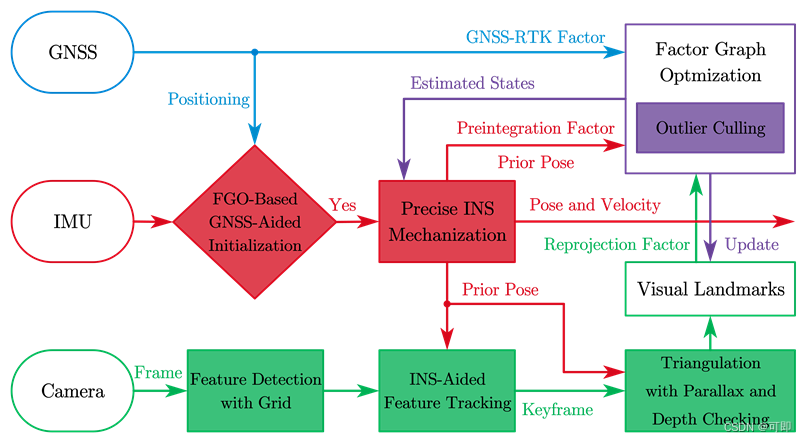
IC-GVINS のシステムブロック図を図 1 に示します。まず、産業グレードの MEMS IMU のパフォーマンスを最大限に発揮するために、INS ソリューションにおける地球の自転の影響を考慮しました。地球の回転を効果的に補正するために、グラフ最適化に基づく GNSS/INS 統合ナビゲーションを使用してシステムを初期化し、地理座標と一致する絶対姿勢を取得します [2]。これに基づいて、ビジュアル フロントエンド システムは GNSS/INS 結果で直接初期化され、既存の GNSS-Visual-INS システムで VINS を独立して初期化する必要があるという問題が解決されます。次に、INS 情報は、視覚フロントエンドの特徴点追跡とランドマーク点三角測量を支援するために使用され、それにより、高動的条件下での視覚特徴点追跡の連続性が向上します。最後に、図 2 に示すように、グラフ最適化フレームワークに基づいて、IMU 事前統合、視覚的特徴点、および GNSS 位置情報が融合されて、正確な状態推定が実現されます。

この論文の主な貢献は次のとおりです。
1) INS の利点を最大限に発揮するために、INS を核とした GNSS-Visual-INS 統合ナビゲーションシステム IC-GVINS を提案する。INSを中核とした設計上の特長としては、地球の自転を考慮した高精度INSアルゴリズム、グラフ最適化に基づくGNSS支援によるINS初期化、INS支援によるビジュアルフロントエンド処理が挙げられます。
2) 正確な INS 事前情報を使用することにより、IC-GVINS は状態推定にまばらなビジュアル キーフレームを使用するだけで済みます。これにより、システムの計算の複雑さが大幅に軽減され、ナビゲーションと測位のリアルタイム パフォーマンスが向上します。同時に、正確な INS 情報を使用して視覚的なフロントエンド特徴点追跡とランドマーク点三角測量が支援され、大規模な動的条件下での堅牢性が向上します。
3) IC-GVINS は、高速車両データセット (KAIST Complex Urban Dataset) と低速ロボット データセット (自己取得) を使用して総合的に評価されます。実験結果は、IC-GVINS が既存のシステムよりも高い精度と堅牢性を示すことを示しています。
4) IC-GVINS のソース コードはオープンソースであり、マルチソース ナビゲーション センサー ロボット データセットもオープンソースです。
要約: IC-GVINS の効果は、INS がマルチセンサー統合ナビゲーション システムにおいてより重要な役割を果たすことができることを示しています。一方で、INS は、マルチソース センサー情報フュージョンのための正確な時空間相関を確立するためのマルチソース センサー フュージョンのリンクとして使用できますが、他方では、INS はバックエンドの姿勢推定に限定されず、マルチソース センサーのフロントエンド観測抽出に正確かつ信頼性の高い支援を提供する必要があります。
参考文献:
[1] Xiaoji Niu、Hailiang Tang、Tisheng Zhang、Jing Fan、および Jingnan Liu、「IC-GVINS: A Robust, Real-time, INS-Centric GNSS-Visual-Inertial Navigation System」、IEEE Robotics and Automation Letters、2022、doi: 10.1109/LRA.2022.3224367。
[2] Hailiang Tang、Tisheng Zhang、Xiaoji Niu、Jing Fan、および Jingnan Liu、「ファクター グラフ最適化の MEMS-IMU 事前統合に対する地球の回転補償の影響」、IEEE Sensors Journal、vol. 22、いいえ。17、pp. 17194–17204、2022 年 9 月、土井: 10.1109/JSEN.2022.3192552。
コードアドレス: https://github.com/i2Nav-WHU/IC-GVINS
論文リンク: http://i2nav.cn/ueditor/jsp/upload/file/20221204/1670138484463044283.pdf
練習:
roslaunch ic_gvins ic_gvins.launch configfile:=/home/sjj/urban38/IC-GVINS/gvins.yaml
rosbag play urban38.bag
evo評価:
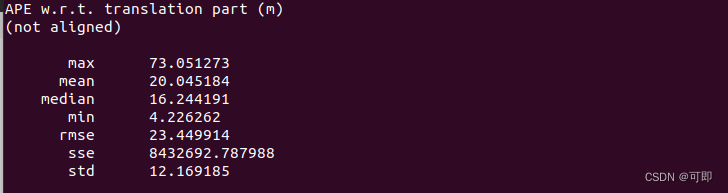
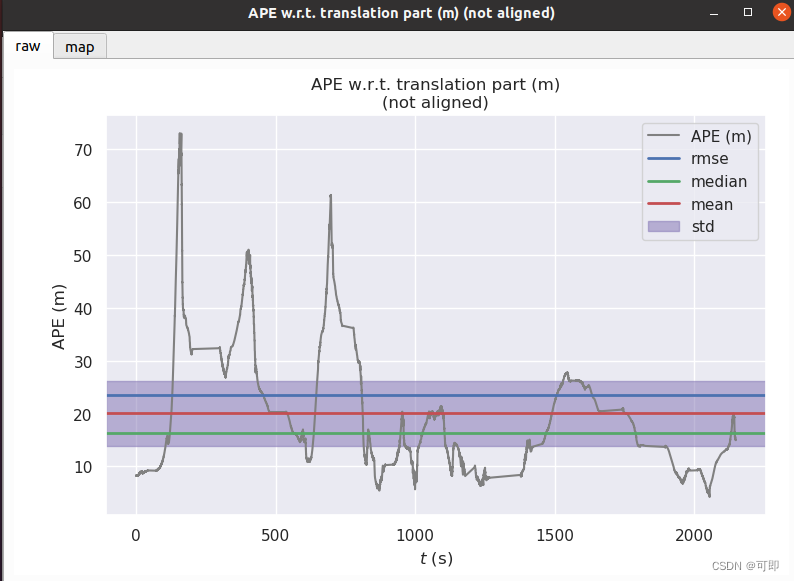
論文に記載されているATEとAREの精度はかなり良いです。私に何か問題があるのかわかりません。知っている人は多くのアドバイスを与えることができます〜