この記事では、ROS で SOFA を使用する方法を学びます。
公式ドキュメントでは ROS2.0 を使用する例がありますが、私のコンピューターには ROS がインストールされているため、この例の使用を検討する前に、ROS2.0 のコードをインストールする必要がありますROSに転写されます。(心配な人)
1. 公式例
例の場所: Sofa_python3.8/plugins/SoftRobots/docs/sofapython3/examples/sofaros
readme.html を開きます:
上記の内容:
(実際の操作については次のセクションを参照してください。最初からソフトウェアを直接開いたので、環境によっては設定後は、後述の「1.1 事前準備」で設定方法を説明します)
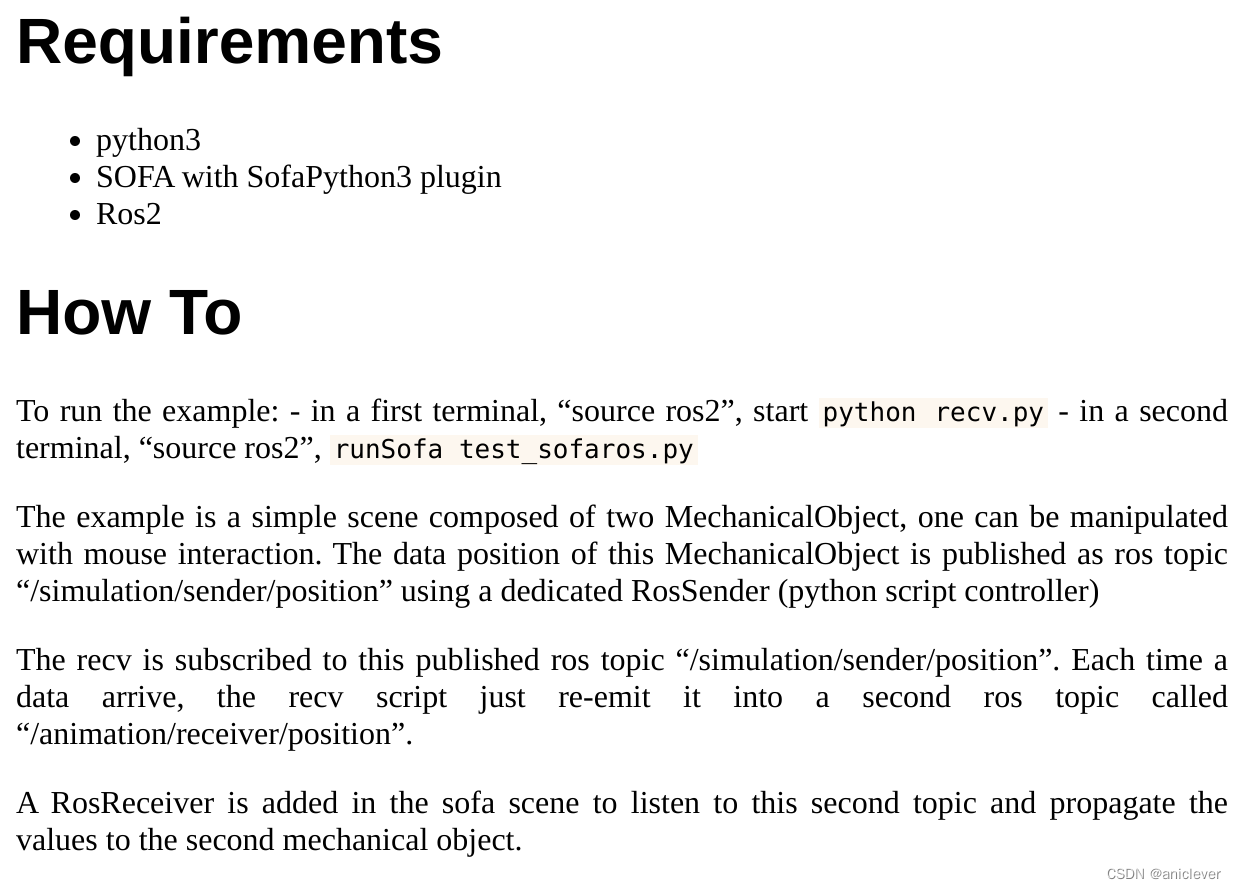
必要な環境は以下のとおりです。
- インストールされたPython3
- Python3バージョンプラグインを使用したソファ
- ROS2.0; (このノートブックのシステムは ubuntu20.04 ですが、環境をセットアップするのが簡単ではない可能性があるため、Windows を使用することは非常にお勧めできません)
使用手順:
4. 次に 2 つの端末を開き、どちらも「source ros2」を実行します。
5. 最初の端末は「python recv.py」を実行します。このファイルの機能は、サブスクリプション情報を転送するための情報転送ステーションとして使用されます。
6. 2 番目のターミナルで「runSofa test_sofaros.py」を実行します。この例は 2 つの MechanicalObject で構成された単純なシーンで、そのうちの 1 つはマウスで対話的に操作できます。この MechanicalObject のデータ位置は、専用の RosSender (Python スクリプト コントローラー) を使用して、ros トピック "/simulation/sender/position" として公開されます。
7.recv は、公開された ros トピック「/simulation/sender/position」実行にサブスクライブされます。
1.1 早めの準備
1.1.1 ソファ関連の設定
まず、ROS 環境でソファを実行したい場合は、シェルでソファを開くことができるようにする必要があります。(公式の基本チュートリアルにはターミナルのコマンドでソファを開く方法が載っていますが、以前はめんどくさいのでソファのアイコンを作ってからターミナルを使っていませんでした…) ここで私の紹介します。関連する構成プロセス。
参考記事:
win11下、SOFA v19(python2)とv21(python3)のデュアルバージョン共存関連設定
公式設定チュートリアル
最初のステップは、スタートアップ ファイル runSofa が配置されているパスをシステム パスに追加することです。これにより、ターミナルで runSofa を使用するたびに、起動ファイルが配置されているフォルダーを見つける必要がなくなります。操作プロセス:
- ターミナルに次のように入力します:
sudo gedit ~/.bashrc現在のユーザーの構成ファイルを開きます(すべてのユーザーに対して構成する場合は、.profile ファイルを開きます) ( gedit に慣れていない場合は、vim、nano などを使用して、ファイルを編集します。私は怠け者なので、 gedit を使用します)。 - 開いた .bashrc ファイルの末尾に次の行を追加し
export PATH=$PATH:/home/zf/Software/Sofa_0328/bin、ファイルを保存します(ファイルはまだ閉じないでください。次の手順ではパスを追加します)。 - ターミナルで次のコマンドを実行して、行った変更を有効にします。
source ~/.bashrc - 完了しました。設定が完了したら新しいターミナルを開きます。どこでも runSofa を使用できます。
2 番目のステップは、SOFA_ROOT、PYTHONPATH の 2 つの部分を含む Sofa の環境変数を構成することです。
- .bashrc ファイルの末尾に以下を追加します。
# <<< sofa initialize <<<
export SOFA_ROOT=/home/zf/Software/Sofa_0328
export PYTHONPATH=$PYTHONPATH:$SOFA_ROOT/plugins/SofaPython3/lib/python3/site-packages:$SOFA_ROOT/plugins/SoftRobots/lib/python3/site-packages
- ここで、/home/zf/Software/Sofa_0328 は私のソファのインストール パスであり、実際の状況に応じて変更できます (ここのインストール パスは以前のものとは異なります。インストール パッケージ内のいくつかのファイルが破損し、再ダウンロードしたためです)バージョン);
- PYTHONPATH の後に追加されたのは、SofaPython3 および SoftRobots プラグインの python3/site-packages の場所です。
- ターミナルで次のコマンドを実行して、行った変更を有効にします。
source ~/.bashrc - 完全な構成
SOFA側で行う設定は以上です。次のコマンドを使用して、この例または以前に記述された .py シミュレーション シーン ファイルを開くことができます。例: まず、.py ファイルが配置されているディレクトリを見つけます (ここでの cd の後ろのパスは実際のパスに変更する必要があります)。次に、runSofa を使用して py ファイルを実行します。
$ cd ~/Sofa_0328/plugins/SoftRobots/docs/sofapython3/tutorials/CableGripper/details
$ runSofa cablegripper.py
1.1.2 Python関連の設定
おそらく python3 をインストールするだけです。以前の Python 環境には何も変更を加えていません。
1.1.3 ROS関連の設定
ROS のインストールについてはここでは繰り返しません。多くの信頼できるインストール チュートリアルが CSDN で見つかります。
ROS ワークスペースを構築したことがない場合は、まずワークスペースを作成する必要があります。作成プロセスについて簡単に説明します。バグは Baidu が解決します。
- ワークスペースを作成するパス:
$ mkdir -p ~/catkin_ws/src # 创路径,catkin_ws可自定名称,但src一定要有
$ cd ~/catkin_ws/src # 进入路径
$ catkin_ini_workspace # 工作空间初始化,把该文件夹定义为工作空间的属性
- コンパイルワークスペース:
$ cd ~/catkin_ws/ # 换到根路径
$ catkin_make # 对该目录进行编译,编译之后要设置环境变量
$ catkin_make install # 编译出install文件夹
- 環境変数の設定:
ターミナルでsourceコマンドを使用して設定された環境変数は、現在のターミナルでのみ有効になります。すべてのターミナルで有効にするには、ターミナル構成ファイルに環境変数設定を追加する必要があります。
$ echo "source /WORKSPACE/devel/setup.bash">>~/.bashrc$ source devel/setup.bash
- 環境変数を確認します。
$ echo $ROS_PACKAGE_PATH #如果打印的路径中已经包含当前工作空间的路径,则说明环境变量设置成功
次に、ワークスペースを作成した後、ワークスペースに関数パッケージを作成します。
$ catkin_create_pkg <pkg_name> [depend1] [depend2] [depend3]
例 (同じワークスペースでは、同じ名前の関数パッケージは存在できませんが、異なるワークスペースでは存在できます)
関数パッケージを作成した後、ワークスペース パスでコンパイルする必要があります。
例:
# 创建功能包
$ cd ~/catkin_ws/src # 功能包在代码空间内创建
$ catkin_create_pkg test_pkg std_msgs rospy roscpp
#功能包必须放到src里,后面是该功能包要用到哪些依赖
# std_msgs是ROS定义的标准的数据结构
# 编译功能包
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
1.2 公式の ROS2.0 コードを ROS に変更する
以下をざっと見てみると、公式サンプルで使っているコードはROS1.0でも実装できるので書き換えてみたいと思いますが、ダメならROS2.0をインストールするしかありません。
2日後…
達成できます!動く!
ROS自体に詳しくないので、さらに回り道をしてしまいましたが、幸いにもうまくいきました。プロセスは次のとおりです。
1.2.1 Ros ワークスペースで関数パッケージを作成する
まず、ROS ワークスペースが構築されていることを確認します (作成プロセスについては上記を参照)。
新しいターミナルを開き、次のコマンドを順番に実行します。
$ cd ~/catkin_ws/src
$ catkin_creat_pkg sofaros_test rospy std_msgs
$ cd ../
$ catkin_make
$ source devel/setup.bash
最初の行は、独自の ROS ワークスペースに応じて調整する必要があります。実際の場所はこれではなく、~/Code/catkin_ws/src です。
関数パッケージを作成した後、sofaros_test フォルダーに新しいフォルダー script を作成し、次の 3 つを追加します。新しい Python ファイルを作成し、実行可能権限を与えます。具体的な操作方法は以下の通りです。
$ cd ~/catkin_ws/src/sofaros_test/
$ mkdir scripts # 在ros工作空间里,为了与放C++代码的文件夹src进行区分,一般会新建一个文件夹scripts
$ cd scripts # 进入该文件夹
$ touch recv.py sofaros.py test_sofaros.py # 新建三个python文件
$ chmod a+x recv.py sofaros.py test_sofaros.py # 给这三个文件赋予可执行权限
その後、これら 3 つのファイルにコードを記述できます。3 つのファイルは、公式の例の同じ名前の 3 つのファイルに対応します。
1.2.2 転送ファイルrecv.pyを書き換える
まずrecv.pyを書き換えます。変更箇所は比較的少なく、比較的基本的なコードばかりなのでコメントは書きません。ROS2.0
のオリジナルファイルを使用:
#!/usr/bin/env python
import rclpy
from std_msgs.msg import Float32MultiArray
import sys
pub = None
def callback(data):
global pub
pub.publish(data)
print(data)
if __name__ == '__main__':
rclpy.init(args=sys.argv)
node = rclpy.create_node('listener')
node.get_logger().info('Created node')
sub = node.create_subscription(Float32MultiArray, "/simulation/sender/position", callback, 10)
pub = node.create_publisher(Float32MultiArray, "/animation/receiver/position", 10)
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
ROS1に書き換えた後:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from std_msgs.msg import Float32MultiArray
import sys
pub = None
def callback(data):
global pub
pub.publish(data)
print(data)
if __name__ == '__main__':
rospy.init_node("listener")
sub = rospy.Subscriber("/simulation/sender/position", Float32MultiArray, callback, queue_size=10)
pub = rospy.Publisher("/animation/receiver/position", Float32MultiArray, queue_size=10)
rospy.spin()
rospy.shutdown()
1.2.3 シミュレーションファイルを書き換える
a.test_sofaros.py
ROS2.0のオリジナルファイルを使用:
# coding: utf8
import sofaros
from std_msgs.msg import Float32MultiArray # wrapper for ROS primitive types, see : https://github.com/ros2/common_interfaces/tree/master/std_msgs
def send(data):
msg = Float32MultiArray()
msg.data = list(data.value[0])
return msg
def recv(data, datafield):
t = data.tolist()
datafield.value = [[t[0] + 1.0, t[1], t[2]]]
def createScene(rootNode):
rootNode.addObject('RequiredPlugin',
pluginName=["Sofa.Component.ODESolver.Backward", "Sofa.Component.SceneUtility"])
rootNode.addObject("EulerImplicitSolver")
rootNode.addObject("CGLinearSolver", iterations=25, threshold=1e-5, tolerance=1e-5)
rootNode.addObject('DefaultAnimationLoop')
rootNode.addObject('DefaultVisualManagerLoop')
s = rootNode.addChild("simulated")
s.addObject("MechanicalObject", name="sender", position=[0.0, 0.0, 0.0])
s.sender.showObject = True
s.sender.showObjectScale = 1.0
s.sender.drawMode = 1
a = rootNode.addChild("animated")
a.addObject("MechanicalObject", name="receiver", position=[0.0, 0.0, 0.0])
a.receiver.showObject = True
a.receiver.showObjectScale = 1.0
a.receiver.drawMode = 1
a.receiver.showColor = [0,1,0,1]
rosNode = sofaros.init("SofaNode")
rootNode.addObject(sofaros.RosReceiver(rosNode, "/animation/receiver/position",
a.receiver.findData("position"), Float32MultiArray, recv))
rootNode.addObject(sofaros.RosSender(rosNode, "/simulation/sender/position",
s.sender.findData("position"), Float32MultiArray, send))
return rootNode
ROS1に書き換えた後:
# coding: utf8
import sofaros
from std_msgs.msg import Float32MultiArray
def send(data):
msg = Float32MultiArray()
msg.data = list(data.value[0])
return msg
def recv(data, datafield):
t = list(data)
datafield.value = [[t[0] + 1.0, t[1], t[2]]]
def createScene(rootNode):
rootNode.addObject('RequiredPlugin',
pluginName=["Sofa.Component.ODESolver.Backward", "Sofa.Component.SceneUtility"])
rootNode.addObject("EulerImplicitSolver")
rootNode.addObject("CGLinearSolver", iterations=25, threshold=1e-5, tolerance=1e-5)
rootNode.addObject('DefaultAnimationLoop')
rootNode.addObject('DefaultVisualManagerLoop')
s = rootNode.addChild("simulated")
s.addObject("MechanicalObject", name="sender", position=[0.0, 0.0, 0.0])
s.sender.showObject = True
s.sender.showObjectScale = 1.0
s.sender.drawMode = 1
a = rootNode.addChild("animated")
a.addObject("MechanicalObject", name="receiver", position=[0.0, 0.0, 0.0])
a.receiver.showObject = True
a.receiver.showObjectScale = 1.0
a.receiver.drawMode = 1
a.receiver.showColor = [0, 1, 0, 1]
# 下面的内容涉及到ROS的使用了
sofaros.init("ReceiverNode")
rootNode.addObject(sofaros.RosReceiver("/animation/receiver/position",
a.receiver.findData("position"), Float32MultiArray, recv))
rootNode.addObject(sofaros.RosSender("/simulation/sender/position",
s.sender.findData("position"), Float32MultiArray, send))
return rootNode
b. ソファロス.py
ROS2.0のオリジナルファイルを使用:
# coding: utf8
import Sofa.Core
import rclpy
class RosSender(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
# to reduce the latency in TCP, we can disable Nagle's algo with tcp_nodelay=False in ROS1
# (https://en.wikipedia.org/wiki/Nagle%27s_algorithm)
# Todo: find the equivalent in ROS2
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosSender"
# Args
self.node = args[0]
rosname = args[1]
self.datafield = args[2]
msgtype = args[3]
self.sendingcb = args[4]
# Create or connect to the topic rosname as a publisher
self.pub = self.node.create_publisher(msgtype, rosname, 10)
def onAnimateEndEvent(self, event):
data = self.sendingcb(self.datafield)
self.pub.publish(data)
class RosReceiver(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosReceiver"
self.node = args[0]
rosname = args[1]
self.datafield = args[2]
msgtype = args[3]
self.recvcb = args[4]
# Create or connect to the topic rosname as a subscription
self.sub = self.node.create_subscription(msgtype, rosname, self.callback, 10)
self.data = None
def callback(self, data):
self.data = data.data
def onAnimateBeginEvent(self, event):
rclpy.spin_once(self.node, timeout_sec=0.001) # Something must be hidden in this spin_once(), without it the callback() is never called
if self.data is not None:
self.recvcb(self.data, self.datafield)
self.data = None
def init(nodeName="Sofa"):
rclpy.init()
node = rclpy.create_node(nodeName)
node.get_logger().info('Created node')
return node
ROS1に書き換えた後:
# coding: utf8
import Sofa.Core
import rospy
from std_msgs.msg import Float32MultiArray
class RosReceiver(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosReceiver"
rosname = args[0]
self.datafield = args[1]
msgtype = args[2]
self.recvcb = args[3]
# Create or connect to the topic rosname as a subscription
self.sub = rospy.Subscriber(rosname, msgtype, self.callback, queue_size=10)
self.data = None
def callback(self, data):
self.data = data.data
def onAnimateBeginEvent(self, event):
if self.data is not None:
self.recvcb(self.data, self.datafield)
self.data = None
class RosSender(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
# Todo: find the equivalent in ROS2
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosSender"
# Args
rosname = args[0]
self.datafield = args[1]
msgtype = args[2]
self.sendingcb = args[3]
# Create or connect to the topic rosname as a publisher
self.pub = rospy.Publisher(rosname, msgtype, queue_size=10)
def onAnimateEndEvent(self, event):
data = self.sendingcb(self.datafield)
self.pub.publish(data)
def init(nodeName="Sofa"):
rospy.init_node(nodeName)
rospy.loginfo('Created Receiver node')
1.3 実行結果
書き込み後の実行プロセス:
まず 3 つのターミナルを開き、次のコマンドを実行します。
$ cd ~/catkin_ws
$ source devel/setup.bash
次に、最初のターミナルで次を実行します。
$ roscore
2 番目のターミナルで実行します。
$ cd ~/catkin_ws/src/sofaros_test/scripts
$ rosrun sofaros_test recv.py
3 番目のターミナルで実行します。
$ cd ~/catkin_ws/src/sofaros_test/scripts
$ runSofa test_sofaros.py
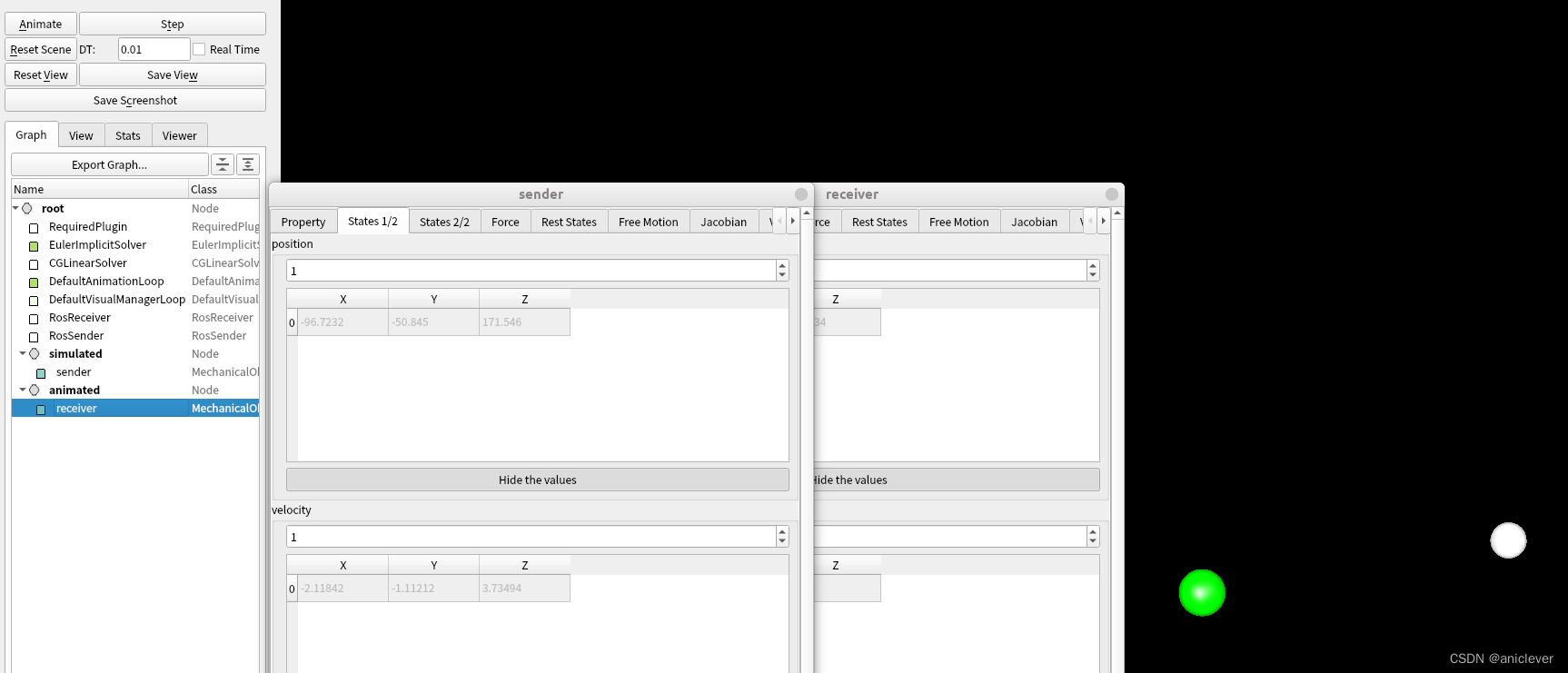
ソファのグラフィカル インターフェイスが表示されたら、[アニメーション] をクリックすると、背景がすでに実行されていることがわかります。ソファで、Shift キーを押しながらボールをドラッグすると、2 つのボールが一緒に動いていることがわかります。ツリー構造のアニメーション/レシーバーとシミュレーション/センダーをダブルクリックし、最初のstates1/2ラベルをクリックすると、2つの位置が同期して変化していることがわかります。図に示すように:

このとき、バックグラウンドで実行されているrecv.pyを閉じると(ターミナルでctrl+cを押す)、ボールは同期して動かなくなります(マイナス側から見ると、先ほどの ROS は成功しました)