オリジナル | Wen BFT ロボット

01
まとめ
この論文では、ガベージピッキングシステムにおける点群セグメンテーションのアルゴリズムを提案します。このアルゴリズムは、低コストの深度カメラ RealSense を使用して点群データを取得し、点群データをフィルタリングしてセグメント化し、最後にセグメント化されたサブブロックを個別に接続して完全なワークモデルを形成します。アルゴリズムの有効性と実用性はテスト ケースによって検証されます。
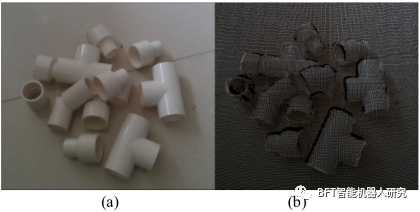
図 1 作業台上の T パイプがきちんと配置されていません。(a) ワークの RGB 画像。(b) 図 1(a) 3D データ点セット。
02
順序付けされていない点群コレクション内のパーツを識別する際の主な課題は何ですか?
深度カメラまたはレーザー スキャナーによって取得された点群の順序付けされていないコレクションから、部品を識別する際の主な課題は、3D オブジェクトを正確にセグメント化する方法です。点群データには乱れやノイズがあるため、点群を個々のオブジェクトに分割し、各オブジェクトの境界と形状を認識するには、効果的なアルゴリズムを開発する必要があります。このようなセグメンテーションの結果は、ロボットが部品を正確に把握して取り扱うために非常に重要です。
03
提案されたアルゴリズムはどのようにポイント データセットをフィルタリングし、サブブロック セグメントに分割するのでしょうか?
提案されたアルゴリズムは、最初に点データセットをフィルタリングして、ノイズと無関係なデータを除去します。これにより、元の順序付けされていない点群のコレクションが、よりクリーンでコンパクトな点群データに変換されます。次に、フィルタリングされた点群データが複数のサブブロック セグメントに分割されます。
特定のセグメンテーションプロセスは、拡張凸面基準および角度基準を使用して点群内の局所的な凸面および角度情報を判断し、それによって点群を複数のサブブロックセグメントに分割することを含んでもよい。これらのサブブロックのフラグメントは、単一のワークピースの 3D モデルを表すことができ、その後のオブジェクトの認識と把握の基礎を提供します。点群データをフィルタリングしてセグメント化することにより、アルゴリズムは元の点群データをより管理しやすいサブブロック フラグメントに変換することができ、これにより後続の処理ステップにより良い基礎が提供されます。
04
提案されたアルゴリズムでサブブロック フラグメントを独立して接続するために使用される 2 つの基準はどれですか?
提案されたアルゴリズムでは、サブブロック フラグメントを独立して接続するために 2 つの基準が使用されます。これら 2 つの基準は、それぞれ拡張凸面基準と角度基準です。これら 2 つの基準を使用すると、アルゴリズムは、点群データ内の局所的な凸性と角度の情報に従って、セグメント化されたサブブロック セグメントを独立して接続し、より大きな結合セグメントを形成できます。
拡張凸性基準は、サブブロックセグメントの凸性特性を判断するために使用され、角度基準は、サブブロックセグメント間の角度関係を判断するために使用される。これら 2 つの基準を使用することにより、アルゴリズムはサブブロック フラグメントを効果的に接続して完全なアーティファクト モデルを形成し、その後の識別と処理の基礎を提供します。
05
論文原理
A. 前処理
この記事の「方法」セクションでは、ノイズを除去する方法について説明します。具体的な手順は次のとおりです。
まず、点群データをフィルタリングして、ノイズや無関係なデータを除去します。これは、ガウス フィルタリングや平均フィルタリングなどのフィルタリング アルゴリズムを使用して実現できます。フィルタリング アルゴリズムにより、点群データを平滑化し、外れ値やノイズを除去できます。
第二に、特定の方法を使用して作業台上のノイズを除去できます。この記事では、RealSense カメラによってスキャンされたワークベンチ上のノイズについて言及しています。ワークベンチ上のノイズを特定して除去することで、セグメンテーション アルゴリズムのパフォーマンスを向上させることができます。特定の方法には、ベンチ上のノイズを検出して除去するための画像処理技術または幾何学的解析方法の使用が含まれる場合があります。
これらのステップを通じて、アルゴリズムは点群データのノイズを効果的に除去し、よりクリーンでコンパクトな点群データを取得できます。これにより、後続のセグメンテーションおよび接続ステップにより正確な入力を提供できます。
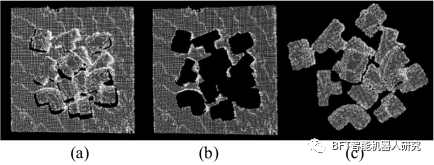
図 2 ワークベンチのノイズ ポイント フィルタリング。(a) ノイズのある点群データ、(b) ワークベンチ平面のノイズ点、(c) フィルタリングされたクリーンな点群。
B. サブブロック フラグメントの分割
拡張された凸面基準と角度基準に従って、点群データは複数のサブブロック フラグメントに分割されます。
特定のセグメント化プロセスには、点群データを複数の小さなブロックまたは領域に分割し、凸性および角度基準に従ってどのブロックまたは領域が同じサブブロック セグメントに属するかを判断することが含まれる場合があります。
各サブブロック フラグメントは、単一のワークピースの 3D モデルとして表現できます。これは、後続の処理と分析のためにサブブロック フラグメント内の点群データを抽出することによって実現できます。
これらのステップを通じて、アルゴリズムは点群データを複数のサブブロック フラグメントにセグメント化することができ、それぞれが 1 つのワークピースの 3D モデルを表すことができます。これは、その後の物体の認識と把握の基礎となります。
C. サブブロック フラグメントを独立して接続する
分割されたサブブロックフラグメントを独立して連結します。特定の接続プロセスには、凸状フィーチャとサブブロック フラグメント間の角度関係が接続基準に準拠していることを確認するために、隣接するサブブロック フラグメントのマッチングと位置合わせが含まれる場合があります。
接続されたサブブロックの断片が完全なワークモデルを形成します。このワークモデルは、その後の物体の認識と把握に使用できます。
これらのステップを通じて、アルゴリズムはセグメント化されたサブブロックの断片を独立して接続して、完全なワークモデルを形成することができます。
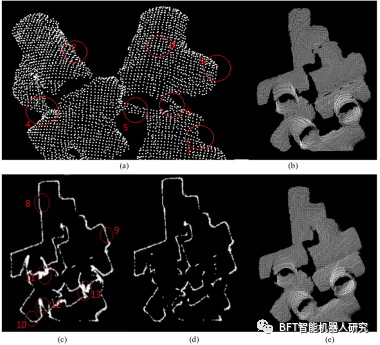
図 3 「境界点」ノイズのフィルタリング: (a) 「境界点」のある点データセット、(b) 「境界点」のないコンパクトな点データ、(c) 「境界点」、(d) 「境界点」はさらに(e) 図 3(b) の特徴点に図 3(d) の特徴点を加算した結果
06
実験効果
この記事では、Intel RealSense SR300 カメラを使用して点群データを取得し、アルゴリズムがテストおよび検証されています。実験結果は、このアルゴリズムが点群データを複数のサブブロック フラグメントに効果的に分割し、これらのサブブロック フラグメントを個別に接続して完全なワークピース モデルを形成できることを示しています。同時に、このアルゴリズムは点群データ内のノイズや無関係なデータを削除することもできるため、アルゴリズムのパフォーマンスと精度が向上します。

図 4 分割結果 (a) 単一タイプの部品の S 分割結果。(b) 多品種部品のSセグメンテーション結果
この記事では、成功したセグメンテーション率や誤ったセグメンテーション率など、アルゴリズムの効果を評価するためにいくつかの定量的な指標も使用しています。実験結果は、このアルゴリズムがさまざまなテスト シナリオで良好な結果を達成でき、セグメンテーション成功率が 95% 以上、誤セグメンテーション率が 5% 未満であることを示しています。これは、このアルゴリズムが高い精度と堅牢性を備えており、実際のガベージピッキングシステムに適用できることを示しています。
実験結果と記事の説明によると、このアルゴリズムは点群セグメンテーションとワーク認識において優れたパフォーマンスと効果を示しています。したがって、このアルゴリズムは、特にガベージピッキングシステムおよび関連分野において、幅広い応用の可能性を秘めています。
まず、このアルゴリズムをガベージ ピッキング システムに適用して、散在する 3D オブジェクトを自動セグメンテーションおよび認識することができます。RealSense などの低コストの深度カメラを使用することで、点群データを取得し、アルゴリズムを使用して点群データをセグメント化し、接続することで、散乱オブジェクトの自動認識とキャプチャを実現できます。これにより、廃棄物ピッキングシステムの効率と精度が大幅に向上します。
さらに、このアルゴリズムは産業オートメーション、ロボットビジョン、物体認識などの他の分野にも適用できます。点群データを分割・結合することで、複雑な物体の認識・解析を実現します。これは、自動化された生産ライン、インテリジェント倉庫システム、ロボット ナビゲーションなどのアプリケーション シナリオにとって非常に価値があります。
一般に、このアルゴリズムは点群セグメンテーションとワーク識別において高い精度と堅牢性を備えており、ガベージピッキングシステムやその他の関連分野に適用でき、自動化とインテリジェンスの実現に強力な技術サポートを提供します。
参考资料: [1] Gong X 、Chen M 、Yang X .RealSense によってサンプリングされた 3D 散乱パーツの点群セグメンテーション[C]//2017 IEEE International Conference on Information and Automation (ICIA).IEEE、2017.DOI:10.1109/ ICInfA.2017.8078881。
さらに面白いコンテンツについては、BFT Robot の公式アカウントにご注目ください。
この記事はオリジナル記事であり、著作権は BFT Robot に帰属します。転載する必要がある場合は、ご連絡ください。この記事の内容についてご質問がございましたら、お問い合わせいただければ迅速に対応させていただきます。