1. 研究内容:
車両運転に基づく異常事象検出の研究は、主に異常車両速度の検出と異常交通挙動の処理の2つから構成されます。
2. 研究目的:
車両の違法な車線変更の検出: 関連する画像処理ツールの使用に習熟すれば、車両の異常な車線変更を検出できます。車速の異常の検出: パターン認識に関連するツールについて学び、車速を分類して対応する異常な動作を特定します。検出された異常動作の処理: 車両の異常動作を検出するには、異常動作を適時記録し、警報を発します。
3. 解決すべき主な問題:
1. 異常な車両運転事象を検出するプロセスと方法を理解し、精通している。
2. 異常な車両運転のモデルを確立する。
3. 実際の問題に応じてモデルを最適化します。
4. 画像表示
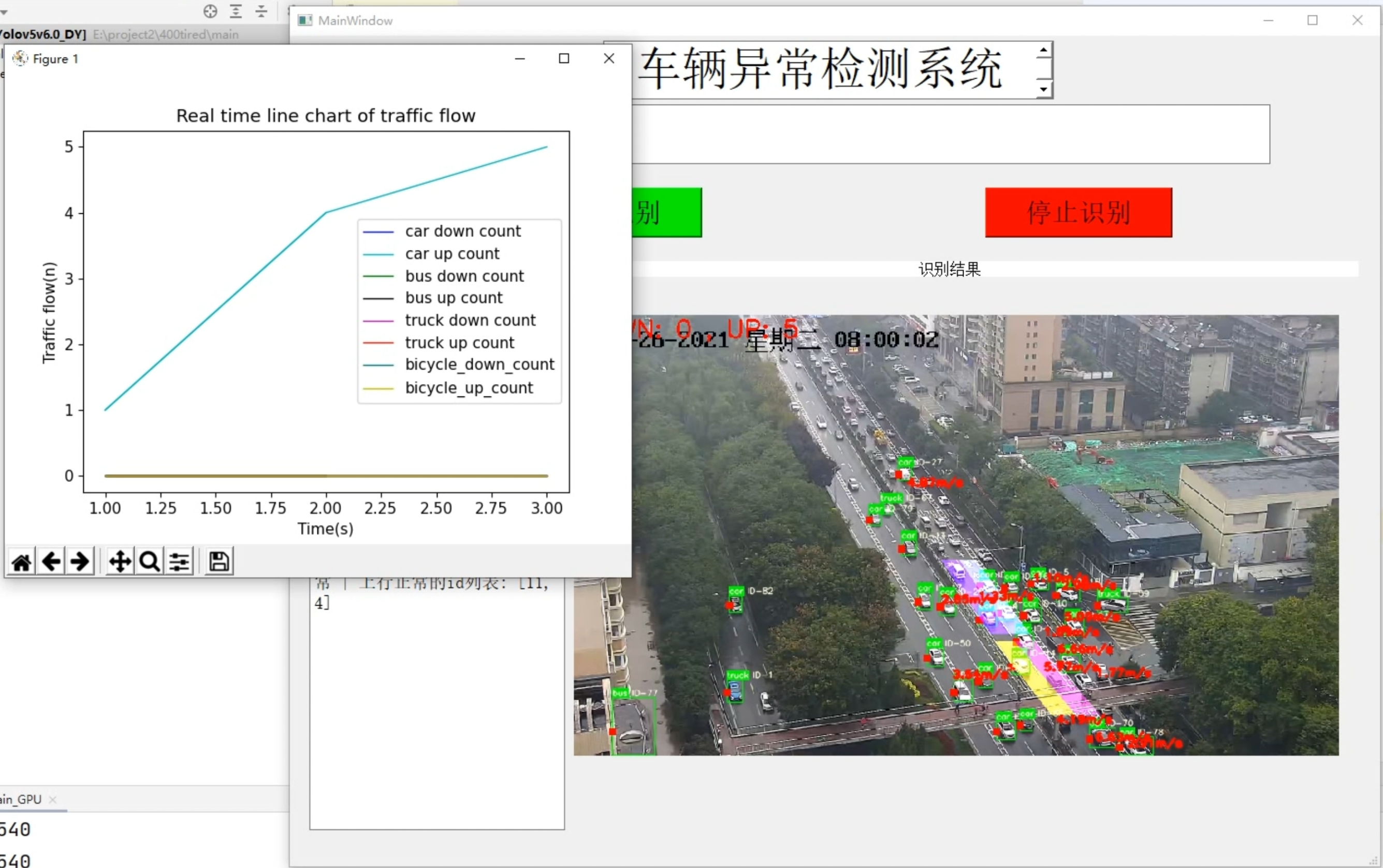
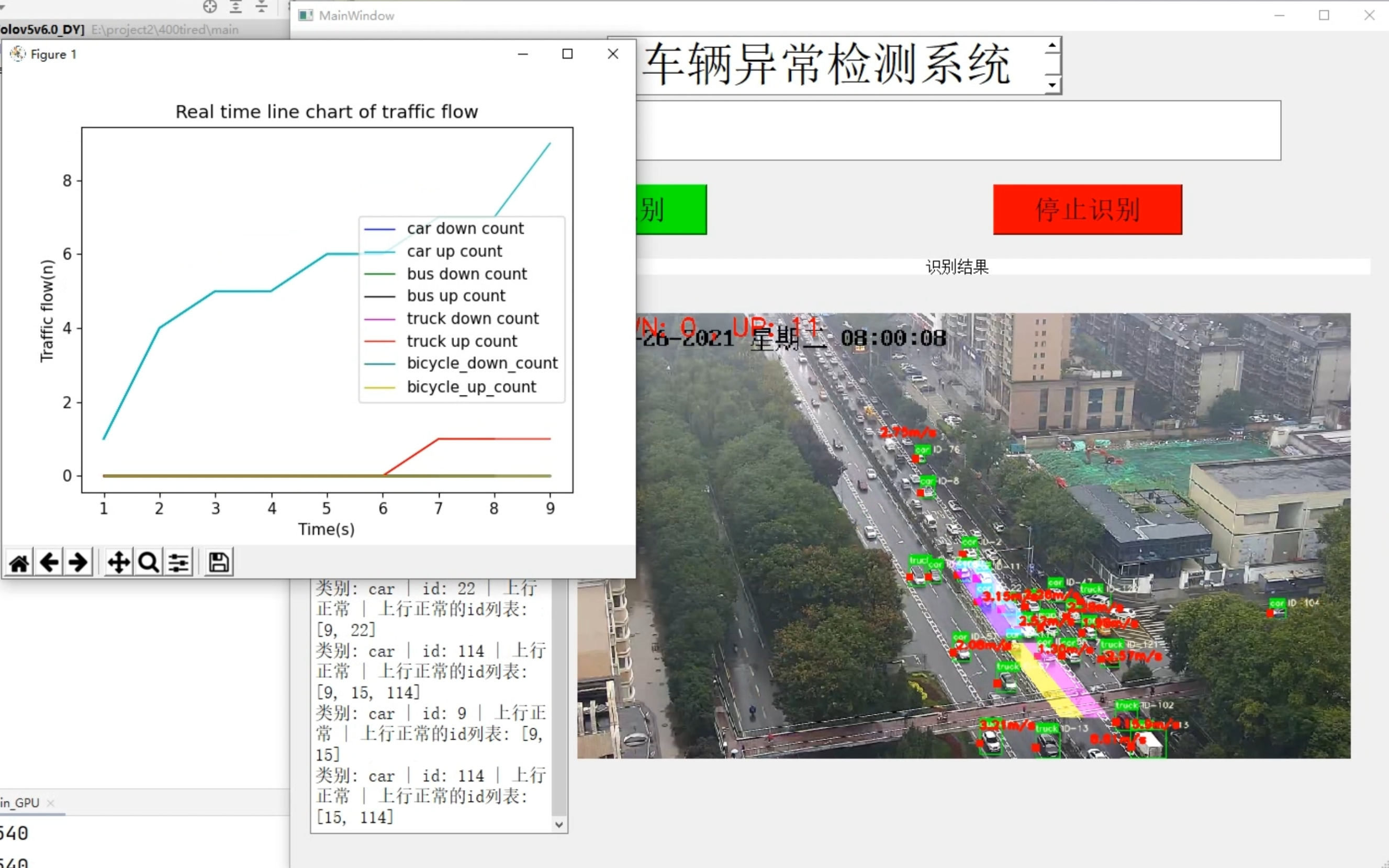
5.ビデオ表示
[YOLOv7] YOLO およびディープソートに基づく車両速度および交通流検出システム (ソースコードおよび導入チュートリアル)_哔哩哔哩_bilibili
6.ディープソートターゲット追跡
(1) 元のビデオ フレームを取得します。
(2) ターゲット検出器を使用して、ビデオ フレーム内のターゲットを検出し
ます。 (3) 検出されたターゲットのフレーム内の特徴を抽出します。これには、見かけの特徴が含まれます (ID スイッチを回避するための便利な特徴比較) )と動き特徴(動き特徴は
カルマンフィルタで予測するのに便利です
) (4) 前後2フレームの対象物の一致度を計算し(ハンガリアンアルゴリズムとカスケードマッチングを使用)、追跡したそれぞれにIDを割り当てます。目標。
ディープソートの前身はソート アルゴリズムであり、ソート アルゴリズムの中核となるのはカルマン フィルター アルゴリズムとハンガリアン アルゴリズムです。
卡尔曼滤波算法作用:该算法的主要作用就是当前的一系列运动变量去预测下一时刻的运动变量,但是第一次的检测结果用来初始化卡尔曼滤波的运动变量。
匈牙利算法的作用:简单来讲就是解决分配问题,就是把一群检测框和卡尔曼预测的框做分配,让卡尔曼预测的框找到和自己最匹配的检测框,达到追踪的效果。
並べ替えのワークフローを次の図に示します。
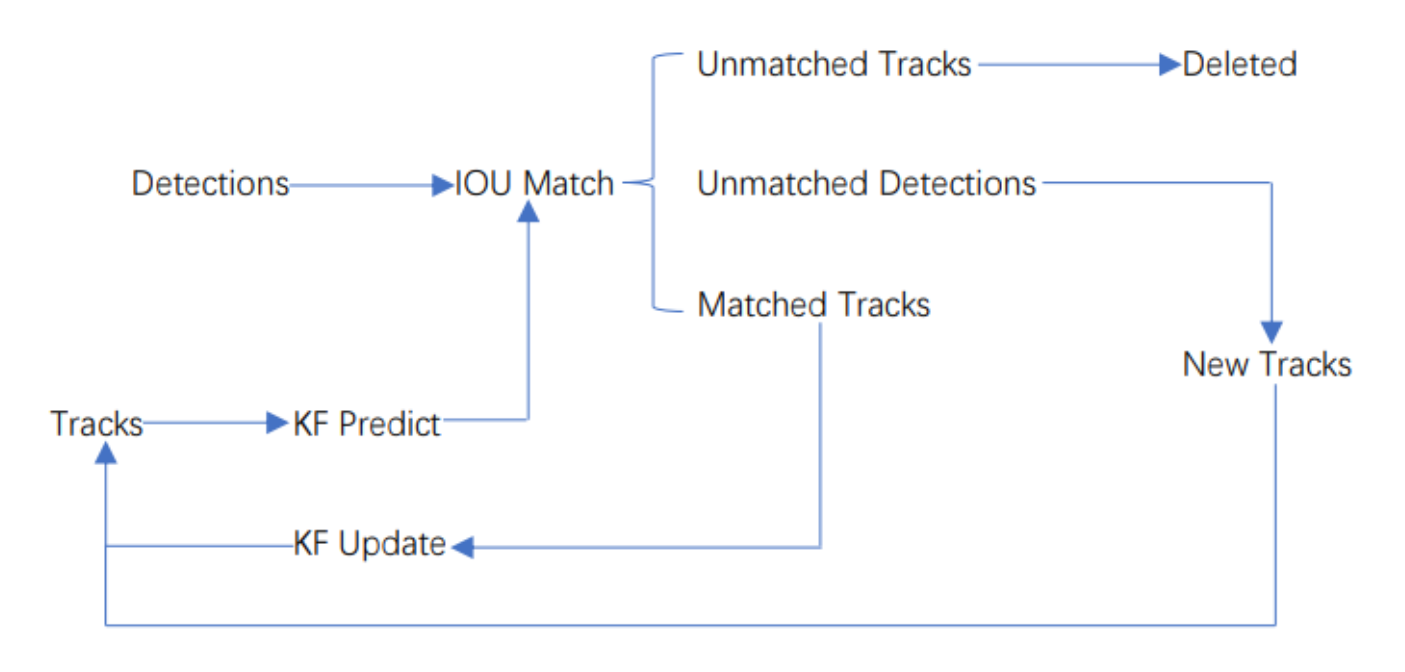
検出とは、ターゲットによって検出されたフレームです。Tracks はトラック情報です。
アルゴリズム全体のワークフローは次のとおりです。
(1) 最初のフレームの検出結果から、対応するトラックを作成します。カルマン フィルターの動き変数を初期化し、カルマン フィルターを通じて対応するフレームを予測します。
(2) フレームターゲット検出のフレームと、前のフレームで Tracks によって予測されたフレームに対して IOU マッチングを実行し、IOU マッチング結果を通じてコスト行列 (コスト行列、計算方法は 1-IOU) を計算します。
(3) (2) で取得したすべてのコスト行列をハンガリアン アルゴリズムの入力として使用し、線形マッチング結果を取得します。この時点で 3 つの結果が得られます。1 つ目はトラックの不一致 (Unmatched Tracks) です。不一致のトラックは直接削除します。トラック、2 番目は検出の不一致 (不一致検出)、そのような検出を新しいトラック (新しいトラック) として初期化します、3 番目は検出フレームと予測フレームのペアリングの成功で、前のフレームと予測フレームの追跡に成功したことを示します。次のフレームで、対応する検出のカルマン フィルターを通じて対応する Tracks 変数を更新します。
(4) ビデオ フレームが終了するまで、手順 (2) ~ (3) を繰り返します。
ディープソートアルゴリズムプロセス
ソート アルゴリズムは依然として比較的大まかな追跡アルゴリズムであるため、オブジェクトが遮られると、特にそのオブジェクト自体の ID が失われやすくなります。このブログを参考にした改良アルゴリズムでは、ソートアルゴリズムをベースにマッチングカスケードマッチング(Matching Cascade)と新たな軌跡の確認(confirmed)を追加しています。トラックは確認済み状態 (confirmed) と未確認状態 (unconfirmed) に分けられ、新しく生成されたトラックは未確認状態、未確認状態 トラックは確認済み状態に変換される前に、一定回数 (デフォルトは 3) 検出と一致する必要があります。 。確認済みトラックは、削除される前に、一定回数 (デフォルトは 30 回) 継続的に検出と不一致になる必要があります。
ディープソート アルゴリズムのワークフローを次の図に示します。
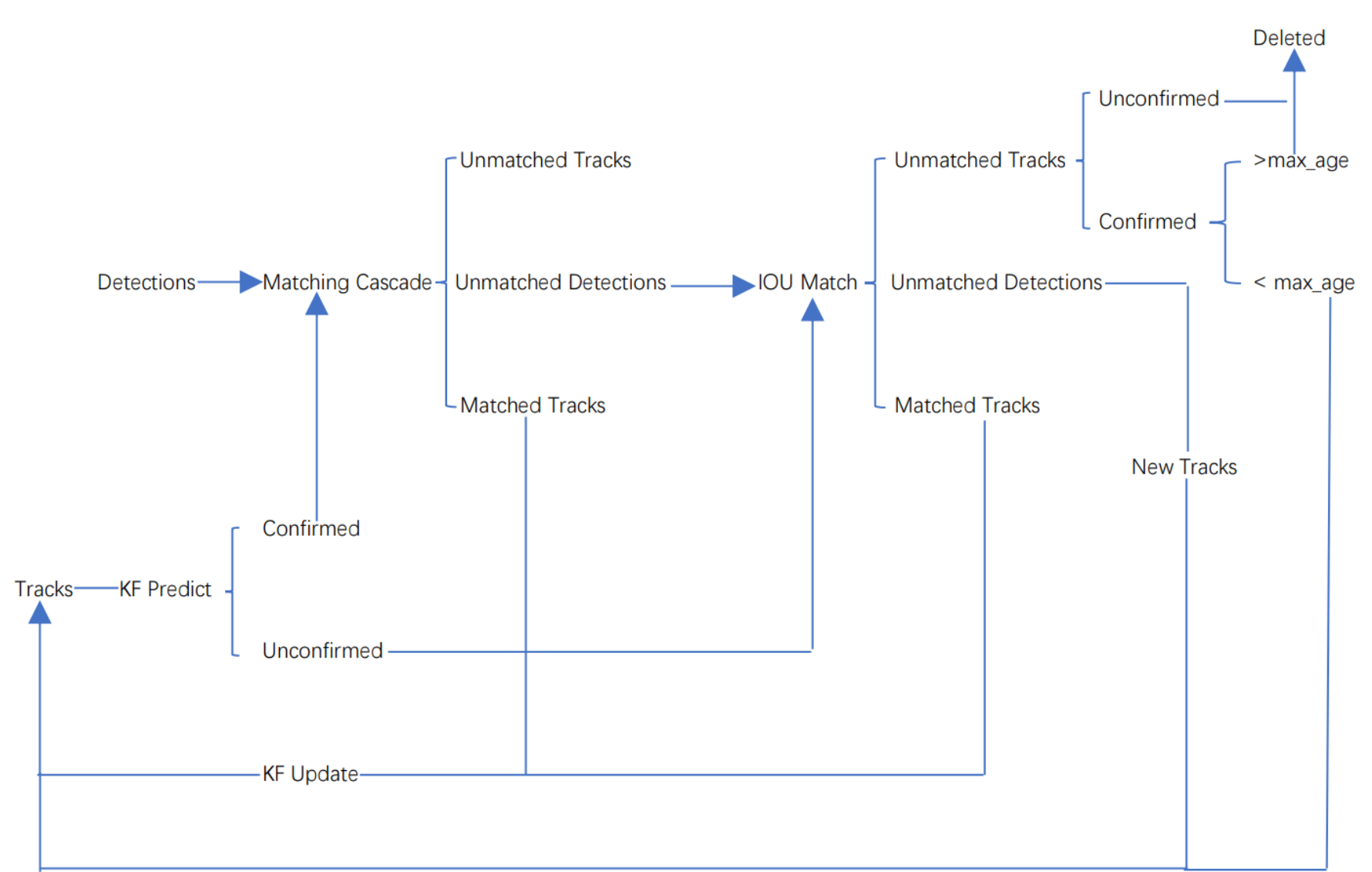
アルゴリズム全体のワークフローは次のとおりです。
(1) 最初のフレームの検出結果から、対応するトラックを作成します。カルマン フィルターの動き変数を初期化し、カルマン フィルターを通じて対応するフレームを予測します。この時点でのトラックは未確認である必要があります。
(2) フレームターゲット検出のフレームと最初のフレームの Tracks によって予測されたフレームに対して IOU マッチングを実行し、IOU マッチング結果を通じてコスト行列 (コスト行列、計算方法は 1-IOU) を計算します。
(3) (2) で取得したすべてのコスト行列をハンガリアン アルゴリズムの入力として使用し、線形マッチング結果を取得します。この時点で 3 つの結果が得られます。1 つ目はトラックの不一致 (Unmatched Tracks) です。不一致のトラックは直接削除します。トラック (このトラックは不確実な状態にあるため、確定した状態の場合は、連続して一定の回数 (デフォルトは 30 回) に達した後でのみ削除できます)、2 番目は検出の不一致 (不一致の検出) です。 , このような検出を新しいトラック (新しいトラック) として初期化します。3 番目は、検出フレームと予測フレームが正常にペアリングされたことです。これは、前のフレームと次のフレームの追跡に成功し、対応する検出が渡されたことを意味します。カルマン フィルターを通じて、対応する Tracks 変数を更新します。
(4) 確認したトラックが表示されるか、ビデオ フレームが終了するまで、手順 (2) ~ (3) を繰り返します。
(5) カルマンフィルターを通して、確定状態のトラックと不確定状態のトラックに対応するボックスを予測します。確認されたトラック フレームと検出のカスケード マッチング (以前は、トラックが一致する限り、検出の外観特徴とモーション情報が保存され、デフォルトで最初の 100 フレームが保存され、外観特徴とモーション情報は保存されます)これは、確認された状態 (確認済み) のトラックと検出が一致する可能性が高いためです)。
(6) カスケード マッチングの後に考えられる結果は 3 つあります。1 つ目は、トラックのマッチングです。このようなトラックは、カルマン フィルターを通じて、対応するトラック変数を更新します。2 番目と 3 番目のタイプは、Detection と Track の不一致であり、このとき、以前に未確認の Track と不一致の Track を 1 つずつ Unmatched Detection と照合して IOU マッチングを行い、コスト マトリックス (コスト マトリックス) を計算します。 IOU 照合結果に基づき、その計算方法は 1-IOU) です。
(7) (6) で取得したすべてのコスト行列をハンガリアン アルゴリズムの入力として使用し、線形マッチング結果を取得します。この時点で 3 つの結果が得られます。1 つ目はトラックの不一致 (Unmatched Tracks) です。不一致のトラックは直接削除します。トラック (このトラックは不確実な状態にあるため、確定した状態の場合は、連続して一定の回数 (デフォルトは 30 回) に達した後でのみ削除できます)、2 番目は検出の不一致 (不一致の検出) です。 , このような検出を新しいトラック (新しいトラック) として初期化します。3 番目は、検出フレームと予測フレームが正常にペアリングされたことです。これは、前のフレームと次のフレームの追跡に成功し、対応する検出が渡されたことを意味します。カルマン フィルターを通じて、対応する Tracks 変数を更新します。
(8) ビデオ フレームが終了するまで手順 (5) ~ (7) を繰り返します。
7. YOLOv7 形式のデータセットを準備する
yolo 形式のデータセットがどのようなものであるかわからない場合は、まずこのブログを読むことをお勧めします。ほとんどの CVer はデータのラベル付けに labelImg を使用することを推奨しますが、私も例外ではなく、すべての人にデータのラベル付けに labelImg を使用することをお勧めします。ただし、ここでは labelImg の詳しい使い方は紹介しません。インターネット上にチュートリアルがたくさんあります。同時に、データのラベル付けにはグラフィカル インターフェイスが必要であり、リモート サーバーでは不便であるため、ローカル コンピュータでラベル付けした後、サーバーにアップロードすることをお勧めします。
ここでは、ラベル付きの yolo 形式のデータセットをすでに取得していると仮定し、このデータセットは次の形式で保存されます。
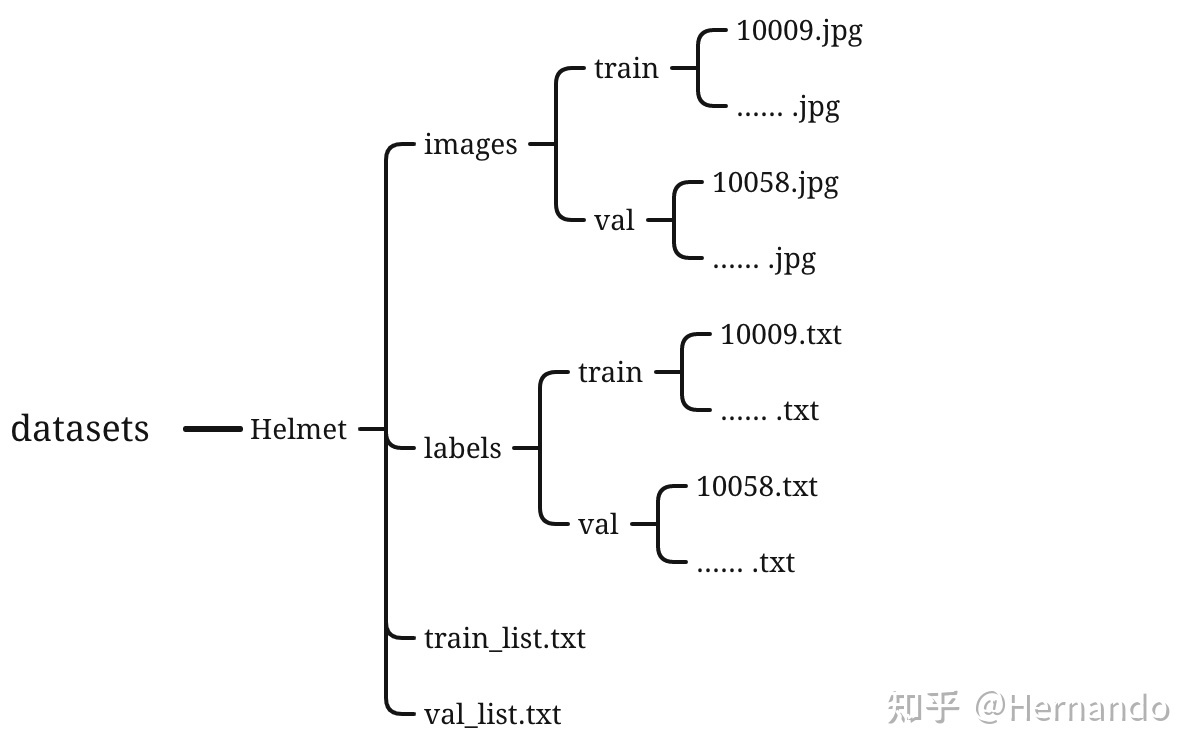
ただし、train_list.txt と val_list.txt は labelImg ではなく後から自分たちで生成され、その他は labelImg によって生成されます。
次に、train_list.txt と val_list.txt を生成します。train_list.txt にはすべての学習ピクチャのパスが、val_list.txt にはすべての検証ピクチャのパスが格納されており、下図のように 1 つの線が 1 つのピクチャのパスを表します。サイクルを記述することでこれら 2 つのファイルを生成するのは難しくありません。
8. 設定ファイルを変更する
構成する必要があるファイルは合計 2 つあり、1 つは /yolov7/cfg/training/yolov7.yaml (モデルの構成ファイル)、もう 1 つは /yolov7/data/coco.yaml (モデルの構成ファイル) です。データセットの構成ファイル。
最初の手順では、yolov7.yaml ファイルを同じパスにコピーし、その名前を yolov7-Helmet.yaml に変更します。
2 番目のステップは、yolov7-Helmet.yaml ファイルを開いて、下の図に示すように変更を加えることです。ここでの変更は 1 つだけで、nc をデータ セットのターゲット合計数に変更することです。それから保存します。

3 番目の手順では、coco.yaml ファイルを同じパスにコピーし、名前を変更します。Helmet.yaml という名前を付けました。
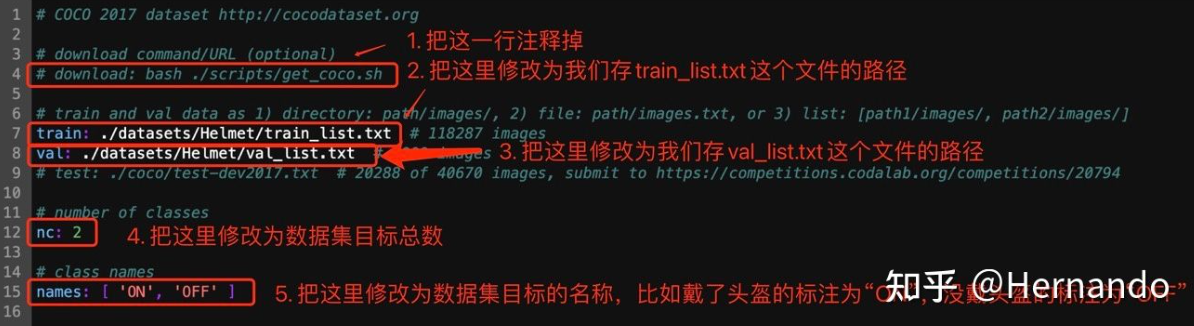
4 番目のステップでは、Helmet.yaml ファイルを開いて以下に示すように変更を加えます。変更する必要がある箇所は 5 か所あります。
1 番目の場所: COCO データセットを自動的にダウンロードするコマンドをコメント アウトして、コードが自動的にデータセットをダウンロードしてメモリを占有するのを防ぎます。2 番目の場所: train_list.txt のパスに train の場所を変更します。3 番目の場所: val の場所 val_list.txt のパス、4 番目の場所: nc をデータセット内のターゲットの総数に変更、5 番目の場所: names をデータセット内のすべてのターゲットの名前に変更します。それから保存します。
9. トレーニングコード
import argparse
import logging
import math
import os
import random
import time
from copy import deepcopy
from pathlib import Path
from threading import Thread
import numpy as np
import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torch.optim.lr_scheduler as lr_scheduler
import torch.utils.data
import yaml
from torch.cuda import amp
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.utils.tensorboard import SummaryWriter
from tqdm import tqdm
import test # import test.py to get mAP after each epoch
from models.experimental import attempt_load
from models.yolo import Model
from utils.autoanchor import check_anchors
from utils.datasets import create_dataloader
from utils.general import labels_to_class_weights, increment_path, labels_to_image_weights, init_seeds, \
fitness, strip_optimizer, get_latest_run, check_dataset, check_file, check_git_status, check_img_size, \
check_requirements, print_mutation, set_logging, one_cycle, colorstr
from utils.google_utils import attempt_download
from utils.loss import ComputeLoss, ComputeLossOTA
from utils.plots import plot_images, plot_labels, plot_results, plot_evolution
from utils.torch_utils import ModelEMA, select_device, intersect_dicts, torch_distributed_zero_first, is_parallel
from utils.wandb_logging.wandb_utils import WandbLogger, check_wandb_resume
logger = logging.getLogger(__name__)
def train(hyp, opt, device, tb_writer=None):
logger.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
save_dir, epochs, batch_size, total_batch_size, weights, rank, freeze = \
Path(opt.save_dir), opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank, opt.freeze
# Directories
wdir = save_dir / 'weights'
wdir.mkdir(parents=True, exist_ok=True) # make dir
last = wdir / 'last.pt'
best = wdir / 'best.pt'
results_file = save_dir / 'results.txt'
# Save run settings
with open(save_dir / 'hyp.yaml', 'w') as f:
yaml.dump(hyp, f, sort_keys=False)
with open(save_dir / 'opt.yaml', 'w') as f:
yaml.dump(vars(opt), f, sort_keys=False)
# Configure
plots = not opt.evolve # create plots
cuda = device.type != 'cpu'
init_seeds(2 + rank)
with open(opt.data) as f:
data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
is_coco = opt.data.endswith('coco.yaml')
# Logging- Doing this before checking the dataset. Might update data_dict
loggers = {'wandb': None} # loggers dict
if rank in [-1, 0]:
opt.hyp = hyp # add hyperparameters
run_id = torch.load(weights, map_location=device).get('wandb_id') if weights.endswith('.pt') and os.path.isfile(weights) else None
wandb_logger = WandbLogger(opt, Path(opt.save_dir).stem, run_id, data_dict)
loggers['wandb'] = wandb_logger.wandb
data_dict = wandb_logger.data_dict
if wandb_logger.wandb:
weights, epochs, hyp = opt.weights, opt.epochs, opt.hyp # WandbLogger might update weights, epochs if resuming
nc = 1 if opt.single_cls else int(data_dict['nc']) # number of classes
names = ['item'] if opt.single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
assert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check
# Model
pretrained = weights.endswith('.pt')
if pretrained:
with torch_distributed_zero_first(rank):
attempt_download(weights) # download if not found locally
ckpt = torch.load(weights, map_location=device) # load checkpoint
model = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
exclude = ['anchor'] if (opt.cfg or hyp.get('anchors')) and not opt.resume else [] # exclude keys
state_dict = ckpt['model'].float().state_dict() # to FP32
state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersect
model.load_state_dict(state_dict, strict=False) # load
logger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # report
else:
model = Model(opt.cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
with torch_distributed_zero_first(rank):
check_dataset(data_dict) # check
train_path = data_dict['train']
test_path = data_dict['val']
# Freeze
freeze = [f'model.{x}.' for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # parameter names to freeze (full or partial)
for k, v in model.named_parameters():
v.requires_grad = True # train all layers
if any(x in k for x in freeze):
print('freezing %s' % k)
v.requires_grad = False
# Optimizer
nbs = 64 # nominal batch size
accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
for k, v in model.named_modules():
if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter):
pg2.append(v.bias) # biases
if isinstance(v, nn.BatchNorm2d):
pg0.append(v.weight) # no decay
elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter):
pg1.append(v.weight) # apply decay
if hasattr(v, 'im'):
if hasattr(v.im, 'implicit'):
pg0.append(v.im.implicit)
else:
for iv in v.im:
pg0.append(iv.implicit)
if hasattr(v, 'imc'):
if hasattr(v.imc, 'implicit'):
pg0.append(v.imc.implicit)
else:
for iv in v.imc:
pg0.append(iv.implicit)
if hasattr(v, 'imb'):
if hasattr(v.imb, 'implicit'):
pg0.append(v.imb.implicit)
else:
for iv in v.imb:
pg0.append(iv.implicit)
if hasattr(v, 'imo'):
if hasattr(v.imo, 'implicit'):
pg0.append(v.imo.implicit)
else:
for iv in v.imo:
pg0.append(iv.implicit)
if hasattr(v, 'ia'):
if hasattr(v.ia, 'implicit'):
pg0.append(v.ia.implicit)
else:
for iv in v.ia:
pg0.append(iv.implicit)
if hasattr(v, 'attn'):
if hasattr(v.attn, 'logit_scale'):
pg0.append(v.attn.logit_scale)
if hasattr(v.attn, 'q_bias'):
pg0.append(v.attn.q_bias)
if hasattr(v.attn, 'v_bias'):
pg0.append(v.attn.v_bias)
if hasattr(v.attn, 'relative_position_bias_table'):
pg0.append(v.attn.relative_position_bias_table)
if hasattr(v, 'rbr_dense'):
if hasattr(v.rbr_dense, 'weight_rbr_origin'):
pg0.append(v.rbr_dense.weight_rbr_origin)
if hasattr(v.rbr_dense, 'weight_rbr_avg_conv'):
pg0.append(v.rbr_dense.weight_rbr_avg_conv)
if hasattr(v.rbr_dense, 'weight_rbr_pfir_conv'):
pg0.append(v.rbr_dense.weight_rbr_pfir_conv)
if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_idconv1'):
pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_idconv1)
if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_conv2'):
pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_conv2)
if hasattr(v.rbr_dense, 'weight_rbr_gconv_dw'):
pg0.append(v.rbr_dense.weight_rbr_gconv_dw)
if hasattr(v.rbr_dense, 'weight_rbr_gconv_pw'):
pg0.append(v.rbr_dense.weight_rbr_gconv_pw)
if hasattr(v.rbr_dense, 'vector'):
pg0.append(v.rbr_dense.vector)
if opt.adam:
optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
else:
optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decay
optimizer.add_param_group({'params': pg2}) # add pg2 (biases)
logger.info('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))
del pg0, pg1, pg2
# Scheduler https://arxiv.org/pdf/1812.01187.pdf
# https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLR
if opt.linear_lr:
lf = lambda x: (1 - x / (epochs - 1)) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
else:
lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
# plot_lr_scheduler(optimizer, scheduler, epochs)
# EMA
ema = ModelEMA(model) if rank in [-1, 0] else None
# Resume
start_epoch, best_fitness = 0, 0.0
if pretrained:
# Optimizer
if ckpt['optimizer'] is not None:
optimizer.load_state_dict(ckpt['optimizer'])
best_fitness = ckpt['best_fitness']
# EMA
if ema and ckpt.get('ema'):
ema.ema.load_state_dict(ckpt['ema'].float().state_dict())
ema.updates = ckpt['updates']
# Results
if ckpt.get('training_results') is not None:
results_file.write_text(ckpt['training_results']) # write results.txt
# Epochs
start_epoch = ckpt['epoch'] + 1
if opt.resume:
assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)
if epochs < start_epoch:
logger.info('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %
(weights, ckpt['epoch'], epochs))
epochs += ckpt['epoch'] # finetune additional epochs
del ckpt, state_dict
# Image sizes
gs = max(int(model.stride.max()), 32) # grid size (max stride)
nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
# DP mode
if cuda and rank == -1 and torch.cuda.device_count() > 1:
model = torch.nn.DataParallel(model)
# SyncBatchNorm
if opt.sync_bn and cuda and rank != -1:
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
logger.info('Using SyncBatchNorm()')
# Trainloader
dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
world_size=opt.world_size, workers=opt.workers,
image_weights=opt.image_weights, quad=opt.quad, prefix=colorstr('train: '))
mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
nb = len(dataloader) # number of batches
assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
# Process 0
if rank in [-1, 0]:
testloader = create_dataloader(test_path, imgsz_test, batch_size * 2, gs, opt, # testloader
hyp=hyp, cache=opt.cache_images and not opt.notest, rect=True, rank=-1,
world_size=opt.world_size, workers=opt.workers,
pad=0.5, prefix=colorstr('val: '))[0]
if not opt.resume:
labels = np.concatenate(dataset.labels, 0)
c = torch.tensor(labels[:, 0]) # classes
# cf = torch.bincount(c.long(), minlength=nc) + 1. # frequency
# model._initialize_biases(cf.to(device))
if plots:
#plot_labels(labels, names, save_dir, loggers)
if tb_writer:
tb_writer.add_histogram('classes', c, 0)
# Anchors
if not opt.noautoanchor:
check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
model.half().float() # pre-reduce anchor precision
# DDP mode
if cuda and rank != -1:
model = DDP(model, device_ids=[opt.local_rank], output_device=opt.local_rank,
# nn.MultiheadAttention incompatibility with DDP https://github.com/pytorch/pytorch/issues/26698
find_unused_parameters=any(isinstance(layer, nn.MultiheadAttention) for layer in model.modules()))
# Model parameters
hyp['box'] *= 3. / nl # scale to layers
hyp['cls'] *= nc / 80. * 3. / nl # scale to classes and layers
hyp['obj'] *= (imgsz / 640) ** 2 * 3. / nl # scale to image size and layers
hyp['label_smoothing'] = opt.label_smoothing
model.nc = nc # attach number of classes to model
model.hyp = hyp # attach hyperparameters to model
model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
model.names = names
# Start training
t0 = time.time()
nw = max(round(hyp['warmup_epochs'] * nb), 1000) # number of warmup iterations, max(3 epochs, 1k iterations)
# nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
maps = np.zeros(nc) # mAP per class
results = (0, 0, 0, 0, 0, 0, 0) # P, R, [email protected], [email protected], val_loss(box, obj, cls)
scheduler.last_epoch = start_epoch - 1 # do not move
scaler = amp.GradScaler(enabled=cuda)
compute_loss_ota = ComputeLossOTA(model) # init loss class
compute_loss = ComputeLoss(model) # init loss class
logger.info(f'Image sizes {imgsz} train, {imgsz_test} test\n'
f'Using {dataloader.num_workers} dataloader workers\n'
f'Logging results to {save_dir}\n'
f'Starting training for {epochs} epochs...')
torch.save(model, wdir / 'init.pt')
for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
model.train()
# Update image weights (optional)
if opt.image_weights:
# Generate indices
if rank in [-1, 0]:
cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
# Broadcast if DDP
if rank != -1:
indices = (torch.tensor(dataset.indices) if rank == 0 else torch.zeros(dataset.n)).int()
dist.broadcast(indices, 0)
if rank != 0:
dataset.indices = indices.cpu().numpy()
# Update mosaic border
# b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
# dataset.mosaic_border = [b - imgsz, -b] # height, width borders
mloss = torch.zeros(4, device=device) # mean losses
if rank != -1:
dataloader.sampler.set_epoch(epoch)
pbar = enumerate(dataloader)
logger.info(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'total', 'labels', 'img_size'))
if rank in [-1, 0]:
pbar = tqdm(pbar, total=nb) # progress bar
optimizer.zero_grad()
for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
ni = i + nb * epoch # number integrated batches (since train start)
imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0
# Warmup
if ni <= nw:
xi = [0, nw] # x interp
# model.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())
for j, x in enumerate(optimizer.param_groups):
# bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])
if 'momentum' in x:
x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
# Multi-scale
if opt.multi_scale:
sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
sf = sz / max(imgs.shape[2:]) # scale factor
if sf != 1:
ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
# Forward
with amp.autocast(enabled=cuda):
pred = model(imgs) # forward
if 'loss_ota' not in hyp or hyp['loss_ota'] == 1:
loss, loss_items = compute_loss_ota(pred, targets.to(device), imgs) # loss scaled by batch_size
else:
loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
if rank != -1:
loss *= opt.world_size # gradient averaged between devices in DDP mode
if opt.quad:
loss *= 4.
# Backward
scaler.scale(loss).backward()
# Optimize
if ni % accumulate == 0:
scaler.step(optimizer) # optimizer.step
scaler.update()
optimizer.zero_grad()
if ema:
ema.update(model)
# Print
if rank in [-1, 0]:
mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
s = ('%10s' * 2 + '%10.4g' * 6) % (
'%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])
pbar.set_description(s)
# Plot
if plots and ni < 10:
f = save_dir / f'train_batch{ni}.jpg' # filename
Thread(target=plot_images, args=(imgs, targets, paths, f), daemon=True).start()
# if tb_writer:
# tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)
# tb_writer.add_graph(torch.jit.trace(model, imgs, strict=False), []) # add model graph
elif plots and ni == 10 and wandb_logger.wandb:
wandb_logger.log({"Mosaics": [wandb_logger.wandb.Image(str(x), caption=x.name) for x in
save_dir.glob('train*.jpg') if x.exists()]})
# end batch ------------------------------------------------------------------------------------------------
# end epoch ----------------------------------------------------------------------------------------------------
# Scheduler
lr = [x['lr'] for x in optimizer.param_groups] # for tensorboard
scheduler.step()
# DDP process 0 or single-GPU
if rank in [-1, 0]:
# mAP
ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'gr', 'names', 'stride', 'class_weights'])
final_epoch = epoch + 1 == epochs
if not opt.notest or final_epoch: # Calculate mAP
wandb_logger.current_epoch = epoch + 1
results, maps, times = test.test(data_dict,
batch_size=batch_size * 2,
imgsz=imgsz_test,
model=ema.ema,
single_cls=opt.single_cls,
dataloader=testloader,
save_dir=save_dir,
verbose=nc < 50 and final_epoch,
plots=plots and final_epoch,
wandb_logger=wandb_logger,
compute_loss=compute_loss,
is_coco=is_coco)
# Write
with open(results_file, 'a') as f:
f.write(s + '%10.4g' * 7 % results + '\n') # append metrics, val_loss
if len(opt.name) and opt.bucket:
os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))
# Log
tags = ['train/box_loss', 'train/obj_loss', 'train/cls_loss', # train loss
'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95',
'val/box_loss', 'val/obj_loss', 'val/cls_loss', # val loss
'x/lr0', 'x/lr1', 'x/lr2'] # params
for x, tag in zip(list(mloss[:-1]) + list(results) + lr, tags):
if tb_writer:
tb_writer.add_scalar(tag, x, epoch) # tensorboard
if wandb_logger.wandb:
wandb_logger.log({tag: x}) # W&B
# Update best mAP
fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, [email protected], [email protected]]
if fi > best_fitness:
best_fitness = fi
wandb_logger.end_epoch(best_result=best_fitness == fi)
# Save model
if (not opt.nosave) or (final_epoch and not opt.evolve): # if save
ckpt = {'epoch': epoch,
'best_fitness': best_fitness,
'training_results': results_file.read_text(),
'model': deepcopy(model.module if is_parallel(model) else model).half(),
'ema': deepcopy(ema.ema).half(),
'updates': ema.updates,
'optimizer': optimizer.state_dict(),
'wandb_id': wandb_logger.wandb_run.id if wandb_logger.wandb else None}
# Save last, best and delete
torch.save(ckpt, last)
if best_fitness == fi:
torch.save(ckpt, best)
if (best_fitness == fi) and (epoch >= 200):
torch.save(ckpt, wdir / 'best_{:03d}.pt'.format(epoch))
if epoch == 0:
torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
elif ((epoch+1) % 25) == 0:
torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
elif epoch >= (epochs-5):
torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
if wandb_logger.wandb:
if ((epoch + 1) % opt.save_period == 0 and not final_epoch) and opt.save_period != -1:
wandb_logger.log_model(
last.parent, opt, epoch, fi, best_model=best_fitness == fi)
del ckpt
# end epoch ----------------------------------------------------------------------------------------------------
# end training
if rank in [-1, 0]:
# Plots
if plots:
plot_results(save_dir=save_dir) # save as results.png
if wandb_logger.wandb:
files = ['results.png', 'confusion_matrix.png', *[f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R')]]
wandb_logger.log({"Results": [wandb_logger.wandb.Image(str(save_dir / f), caption=f) for f in files
if (save_dir / f).exists()]})
# Test best.pt
logger.info('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))
if opt.data.endswith('coco.yaml') and nc == 80: # if COCO
for m in (last, best) if best.exists() else (last): # speed, mAP tests
results, _, _ = test.test(opt.data,
batch_size=batch_size * 2,
imgsz=imgsz_test,
conf_thres=0.001,
iou_thres=0.7,
model=attempt_load(m, device).half(),
single_cls=opt.single_cls,
dataloader=testloader,
save_dir=save_dir,
save_json=True,
plots=False,
is_coco=is_coco)
# Strip optimizers
final = best if best.exists() else last # final model
for f in last, best:
if f.exists():
strip_optimizer(f) # strip optimizers
if opt.bucket:
os.system(f'gsutil cp {final} gs://{opt.bucket}/weights') # upload
if wandb_logger.wandb and not opt.evolve: # Log the stripped model
wandb_logger.wandb.log_artifact(str(final), type='model',
name='run_' + wandb_logger.wandb_run.id + '_model',
aliases=['last', 'best', 'stripped'])
wandb_logger.finish_run()
else:
dist.destroy_process_group()
torch.cuda.empty_cache()
return results
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='yolov7.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default='cfg/training/yolov7.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
parser.add_argument('--hyp', type=str, default='data/hyp.scratch.p5.yaml', help='hyperparameters path')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=4, help='total batch size for all GPUs')
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
parser.add_argument('--workers', type=int, default=0, help='maximum number of dataloader workers')
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--entity', default=None, help='W&B entity')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--quad', action='store_true', help='quad dataloader')
parser.add_argument('--linear-lr', action='store_true', help='linear LR')
parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
parser.add_argument('--freeze', nargs='+', type=int, default=[0], help='Freeze layers: backbone of yolov7=50, first3=0 1 2')
opt = parser.parse_args()
# Set DDP variables
opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
set_logging(opt.global_rank)
#if opt.global_rank in [-1, 0]:
# check_git_status()
# check_requirements()
# Resume
wandb_run = check_wandb_resume(opt)
if opt.resume and not wandb_run: # resume an interrupted run
ckpt = opt.resume if isinstance(opt.resume, str) else get_latest_run() # specified or most recent path
assert os.path.isfile(ckpt), 'ERROR: --resume checkpoint does not exist'
apriori = opt.global_rank, opt.local_rank
with open(Path(ckpt).parent.parent / 'opt.yaml') as f:
opt = argparse.Namespace(**yaml.load(f, Loader=yaml.SafeLoader)) # replace
opt.cfg, opt.weights, opt.resume, opt.batch_size, opt.global_rank, opt.local_rank = '', ckpt, True, opt.total_batch_size, *apriori # reinstate
logger.info('Resuming training from %s' % ckpt)
else:
# opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')
opt.data, opt.cfg, opt.hyp = check_file(opt.data), check_file(opt.cfg), check_file(opt.hyp) # check files
assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
opt.name = 'evolve' if opt.evolve else opt.name
opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
# DDP mode
opt.total_batch_size = opt.batch_size
device = select_device(opt.device, batch_size=opt.batch_size)
if opt.local_rank != -1:
assert torch.cuda.device_count() > opt.local_rank
torch.cuda.set_device(opt.local_rank)
device = torch.device('cuda', opt.local_rank)
dist.init_process_group(backend='nccl', init_method='env://') # distributed backend
assert opt.batch_size % opt.world_size == 0, '--batch-size must be multiple of CUDA device count'
opt.batch_size = opt.total_batch_size // opt.world_size
# Hyperparameters
with open(opt.hyp) as f:
hyp = yaml.load(f, Loader=yaml.SafeLoader) # load hyps
# Train
logger.info(opt)
if not opt.evolve:
tb_writer = None # init loggers
if opt.global_rank in [-1, 0]:
prefix = colorstr('tensorboard: ')
logger.info(f"{prefix}Start with 'tensorboard --logdir {opt.project}', view at http://localhost:6006/")
tb_writer = SummaryWriter(opt.save_dir) # Tensorboard
train(hyp, opt, device, tb_writer)
# Evolve hyperparameters (optional)
else:
# Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
meta = {'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
'box': (1, 0.02, 0.2), # box loss gain
'cls': (1, 0.2, 4.0), # cls loss gain
'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
'iou_t': (0, 0.1, 0.7), # IoU training threshold
'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
'scale': (1, 0.0, 0.9), # image scale (+/- gain)
'shear': (1, 0.0, 10.0), # image shear (+/- deg)
'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
'mosaic': (1, 0.0, 1.0), # image mixup (probability)
'mixup': (1, 0.0, 1.0), # image mixup (probability)
'copy_paste': (1, 0.0, 1.0), # segment copy-paste (probability)
'paste_in': (1, 0.0, 1.0)} # segment copy-paste (probability)
with open(opt.hyp, errors='ignore') as f:
hyp = yaml.safe_load(f) # load hyps dict
if 'anchors' not in hyp: # anchors commented in hyp.yaml
hyp['anchors'] = 3
assert opt.local_rank == -1, 'DDP mode not implemented for --evolve'
opt.notest, opt.nosave = True, True # only test/save final epoch
# ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
yaml_file = Path(opt.save_dir) / 'hyp_evolved.yaml' # save best result here
if opt.bucket:
os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
for _ in range(300): # generations to evolve
if Path('evolve.txt').exists(): # if evolve.txt exists: select best hyps and mutate
# Select parent(s)
parent = 'single' # parent selection method: 'single' or 'weighted'
x = np.loadtxt('evolve.txt', ndmin=2)
n = min(5, len(x)) # number of previous results to consider
x = x[np.argsort(-fitness(x))][:n] # top n mutations
w = fitness(x) - fitness(x).min() # weights
if parent == 'single' or len(x) == 1:
# x = x[random.randint(0, n - 1)] # random selection
x = x[random.choices(range(n), weights=w)[0]] # weighted selection
elif parent == 'weighted':
x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
# Mutate
mp, s = 0.8, 0.2 # mutation probability, sigma
npr = np.random
npr.seed(int(time.time()))
g = np.array([x[0] for x in meta.values()]) # gains 0-1
ng = len(meta)
v = np.ones(ng)
while all(v == 1): # mutate until a change occurs (prevent duplicates)
v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
hyp[k] = float(x[i + 7] * v[i]) # mutate
# Constrain to limits
for k, v in meta.items():
hyp[k] = max(hyp[k], v[1]) # lower limit
hyp[k] = min(hyp[k], v[2]) # upper limit
hyp[k] = round(hyp[k], 5) # significant digits
# Train mutation
results = train(hyp.copy(), opt, device)
# Write mutation results
print_mutation(hyp.copy(), results, yaml_file, opt.bucket)
# Plot results
plot_evolution(yaml_file)
print(f'Hyperparameter evolution complete. Best results saved as: {yaml_file}\n'
f'Command to train a new model with these hyperparameters: $ python train.py --hyp {yaml_file}')
10. UIインターフェースの作成とシステム統合
class Thread_1(QThread): # 线程1
def __init__(self,info1):
super().__init__()
self.info1=info1
self.run2(self.info1)
def run2(self, info1):
result = []
result = det_yolov7(info1)
class Ui_MainWindow(object):
def setupUi(self, MainWindow):
MainWindow.setObjectName("MainWindow")
MainWindow.resize(1280, 960)
MainWindow.setStyleSheet("background-image: url(\"./template/carui.png\")")
self.centralwidget = QtWidgets.QWidget(MainWindow)
self.centralwidget.setObjectName("centralwidget")
self.label = QtWidgets.QLabel(self.centralwidget)
self.label.setGeometry(QtCore.QRect(168, 60, 551, 71))
self.label.setAutoFillBackground(False)
self.label.setStyleSheet("")
self.label.setFrameShadow(QtWidgets.QFrame.Plain)
self.label.setAlignment(QtCore.Qt.AlignCenter)
self.label.setObjectName("label")
self.label.setStyleSheet("font-size:42px;font-weight:bold;font-family:SimHei;background:rgba(255,255,255,0);")
self.label_2 = QtWidgets.QLabel(self.centralwidget)
self.label_2.setGeometry(QtCore.QRect(40, 188, 751, 501))
self.label_2.setStyleSheet("background:rgba(255,255,255,1);")
self.label_2.setAlignment(QtCore.Qt.AlignCenter)
self.label_2.setObjectName("label_2")
self.textBrowser = QtWidgets.QTextBrowser(self.centralwidget)
self.textBrowser.setGeometry(QtCore.QRect(73, 746, 851, 174))
self.textBrowser.setStyleSheet("background:rgba(0,0,0,0);")
self.textBrowser.setObjectName("textBrowser")
self.pushButton = QtWidgets.QPushButton(self.centralwidget)
self.pushButton.setGeometry(QtCore.QRect(1020, 750, 150, 40))
self.pushButton.setStyleSheet("background:rgba(53,142,255,1);border-radius:10px;padding:2px 4px;")
self.pushButton.setObjectName("pushButton")
self.pushButton_2 = QtWidgets.QPushButton(self.centralwidget)
self.pushButton_2.setGeometry(QtCore.QRect(1020, 810, 150, 40))
self.pushButton_2.setStyleSheet("background:rgba(53,142,255,1);border-radius:10px;padding:2px 4px;")
self.pushButton_2.setObjectName("pushButton_2")
self.pushButton_3 = QtWidgets.QPushButton(self.centralwidget)
self.pushButton_3.setGeometry(QtCore.QRect(1020, 870, 150, 40))
self.pushButton_3.setStyleSheet("background:rgba(53,142,255,1);border-radius:10px;padding:2px 4px;")
self.pushButton_3.setObjectName("pushButton_2")
MainWindow.setCentralWidget(self.centralwidget)
self.retranslateUi(MainWindow)
QtCore.QMetaObject.connectSlotsByName(MainWindow)
def retranslateUi(self, MainWindow):
_translate = QtCore.QCoreApplication.translate
MainWindow.setWindowTitle(_translate("MainWindow", "基于YOLO&Deepsort的交通车流量统计系统"))
self.label.setText(_translate("MainWindow", "基于YOLO&Deepsort的交通车流量统计系统"))
self.label_2.setText(_translate("MainWindow", "请添加对象,注意路径不要存在中文"))
self.pushButton.setText(_translate("MainWindow", "选择对象"))
self.pushButton_2.setText(_translate("MainWindow", "开始识别"))
self.pushButton_3.setText(_translate("MainWindow", "退出系统"))
# 点击文本框绑定槽事件
self.pushButton.clicked.connect(self.openfile)
self.pushButton_2.clicked.connect(self.click_1)
self.pushButton_3.clicked.connect(self.handleCalc3)
def openfile(self):
global sname, filepath
fname = QFileDialog()
fname.setAcceptMode(QFileDialog.AcceptOpen)
fname, _ = fname.getOpenFileName()
if fname == '':
return
filepath = os.path.normpath(fname)
sname = filepath.split(os.sep)
ui.printf("当前选择的文件路径是:%s" % filepath)
try:
show = cv2.imread(filepath)
ui.showimg(show)
except:
ui.printf('请检查路径是否存在中文,更名后重试!')
def handleCalc3(self):
os._exit(0)
def printf(self,text):
self.textBrowser.append(text)
self.cursor = self.textBrowser.textCursor()
self.textBrowser.moveCursor(self.cursor.End)
QtWidgets.QApplication.processEvents()
def showimg(self,img):
global vid
img2 = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
_image = QtGui.QImage(img2[:], img2.shape[1], img2.shape[0], img2.shape[1] * 3,
QtGui.QImage.Format_RGB888)
n_width = _image.width()
n_height = _image.height()
if n_width / 500 >= n_height / 400:
ratio = n_width / 700
else:
ratio = n_height / 700
new_width = int(n_width / ratio)
new_height = int(n_height / ratio)
new_img = _image.scaled(new_width, new_height, Qt.KeepAspectRatio)
self.label_2.setPixmap(QPixmap.fromImage(new_img))
def click_1(self):
global filepath
try:
self.thread_1.quit()
except:
pass
self.thread_1 = Thread_1(filepath) # 创建线程
self.thread_1.wait()
self.thread_1.start() # 开始线程
if __name__ == "__main__":
app = QtWidgets.QApplication(sys.argv)
MainWindow = QtWidgets.QMainWindow()
ui = Ui_MainWindow()
ui.setupUi(MainWindow)
MainWindow.show()
sys.exit(app.exec_())
11. 車速検出
車両速度は交通情報収集システムによって検出される主要な動的パラメータの1つであり、速度違反車両や違反車両を監視し、交通安全上の危険を排除するために速度を制限することの重要性がますます高まっています。最後に、各検出技術の実際の適用場面と条件を比較して説明し、ビデオ車両検出技術がリアルタイムの交通情報収集の発展の方向性となることを示しています。そしてこれからの加工技術。
コード
start_time = time.time()
rc, image = video.read()
if type(image) == type(None):
break
image = cv2.resize(image, (WIDTH, HEIGHT))
resultImage = image.copy()
frameCounter = frameCounter + 1
carIDtoDelete = []
for carID in carTracker.keys():
trackingQuality = carTracker[carID].update(image)
if trackingQuality < 7:
carIDtoDelete.append(carID)
for carID in carIDtoDelete:
print ('Removing carID ' + str(carID) + ' from list of trackers.')
print ('Removing carID ' + str(carID) + ' previous location.')
print ('Removing carID ' + str(carID) + ' current location.')
carTracker.pop(carID, None)
carLocation1.pop(carID, None)
carLocation2.pop(carID, None)
if not (frameCounter % 10):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
cars = carCascade.detectMultiScale(gray, 1.1, 13, 18, (24, 24))
for (_x, _y, _w, _h) in cars:
x = int(_x)
y = int(_y)
w = int(_w)
h = int(_h)
x_bar = x + 0.5 * w
y_bar = y + 0.5 * h
matchCarID = None
for carID in carTracker.keys():
trackedPosition = carTracker[carID].get_position()
t_x = int(trackedPosition.left())
t_y = int(trackedPosition.top())
t_w = int(trackedPosition.width())
t_h = int(trackedPosition.height())
t_x_bar = t_x + 0.5 * t_w
t_y_bar = t_y + 0.5 * t_h
if ((t_x <= x_bar <= (t_x + t_w)) and (t_y <= y_bar <= (t_y + t_h)) and (x <= t_x_bar <= (x + w)) and (y <= t_y_bar <= (y + h))):
matchCarID = carID
if matchCarID is None:
print ('Creating new tracker ' + str(currentCarID))
tracker = dlib.correlation_tracker()
tracker.start_track(image, dlib.rectangle(x, y, x + w, y + h))
carTracker[currentCarID] = tracker
carLocation1[currentCarID] = [x, y, w, h]
currentCarID = currentCarID + 1
#cv2.line(resultImage,(0,480),(1280,480),(255,0,0),5)
12. システム統合
以下の完全なソース コード、環境展開ビデオ チュートリアル、カスタム UI インターフェイス、および 4D オリジナルの技術ドキュメント
参考ブログ「【YOLOv7】YOLO&ディープソートをベースにした車速&交通流検知システム(ソースコード&導入チュートリアル)」
13. 参考文献:
- [1]自動車ビデオ速度測定における主要技術の研究と実装[J]. 王明燕、朱明峰、王昊. コンピュータ工学. 2006(05)
- [2]超音波原理と現代応用に関する考察[J]. 王裕康. 貴州大学紀要 (自然科学編). 2005(03)
- [3]交通制御分野における地上感知コイルの応用[J]. Wang Shuxin, Wu Xiangbin. Electronic World. 2005(08)
- [4]道路動的計量システム用赤外線速度センサーの開発[J]. 蘇秀平、王秀芳. 機械設計と製造. 2005(06)
- [5]パルス半導体レーザー速度計の研究[J]. 周静. 長春大学雑誌. 2005(02)
- [6]公安交通管理におけるレーダー速度測定の応用[J]. 楊岳祥. 広東省公安技術. 2005(01)
- [7]レーザー速度測定の物理原理[J]. 邱九子. 現代物理学の知識. 1998(05)