振り子の問題は次のように表すことができます
θ¨+gLsinθ=0\ ddot {\ theta} + \ frac {g} {L} {\ sin \ theta} = 0θ¨+Lgそれなしθ=0
その中で、gggは重力加速度です;LLLは振り子の長さです;θ\thetaθはスイング角度であり、この方程式の分析解はありません。
角度が比較的小さい場合、sin(θ)≈θ\ sin(\ theta)\approx \ thetasin (θ )≈θの場合、振り子の問題は線形形式に還元できます
θ¨+gLθ=0\ ddot {\ theta} + \ frac {g} {L} {\ theta} = 0θ¨+Lgθ=0
角度が大きい場合、数値的に解くことができます。まず、それを一階微分方程式のシステムに分割します
θ˙=ωω˙=−gLsinθ\begin{aligned}&\ dot {\ theta} = \ omega \\&\ dot {\ omega} =-\ frac {g} {L} {\ sin \ theta} \ end {aligned}。θ˙=ωω˙=−Lgそれなしθ
using OrdinaryDiffEq, Plots
plotlyjs()
const g = 9.81 #g是常量
L = 1.0
u₀ = [0,π/2]
tspan = (0.0,6.0)
#定义问题
function simplependulum(du,u,t)
θ = u[1]
ω = u[2] #\omega + tab = ω
du[1] = ω
du[2] = -(g/L)*sin(θ)
end
prob = ODEProblem(simplependulum, u₀, tspan)
sol = solve(prob,Tsit5())
# plotlyjs绘图面板中有个相机的图标,点击可保存图片
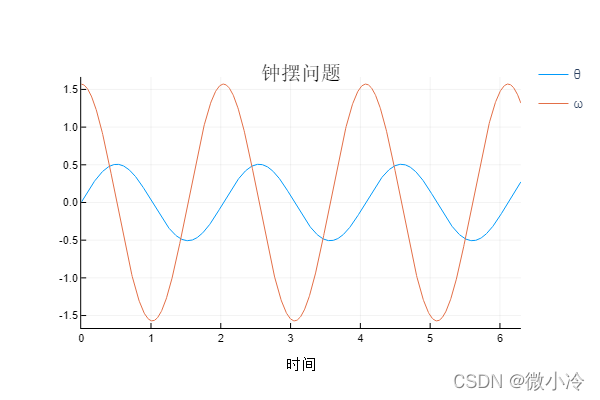
plot!(sol, title ="钟摆问题", xaxis = "时间", label = ["θ" "ω"])
写真が示すように
その中にTsit5は、崩壊曲線を解くために以前に使用されたが、説明されていない一次非線形微分方程式のシステムのソルバーがあります。Tsit5これは、SciML、5次のTsitouras法、および改良されたRunge-Kutta法によって推奨される推奨ソルバーです。
物理学では、時間の経過に伴う物理量の関係を確立することに加えて、物理量の関係、特に速度と座標の関係を確立する必要がある場合があります。これは、一般に位相空間として知られる、システムのすべての可能な状態を構成します。
3次元空間では、速度と運動量はそれぞれ3つの方向を持っているため、3次元空間の位相空間は一般に6つの次元を持ちます。ただし、ぐらつきの問題の場合、速度と位置を1次元に減らすことができるため、位相空間には2次元があります。
描画空間にも2次元があるため、線のみを描画できます。つまり、位相空間から描画できる線は一部のみです。
p = plot(sol,vars = (1,2), xlims = (-15,15), title = "相空间", xaxis = "速度", yaxis = "位置", leg=false)
# 用于绘图的函数
function phase_plot(func, u0, p)
prob = ODEProblem(func,u0,(0.0,2pi))
sol = solve(prob,Vern9()) # Vern9精度更高
plot!(p,sol,vars = (1,2))
end
for i in -4pi:pi/2:4π
for j in -4pi:pi/2:4π
phase_plot(simplependulum, [j,i], p)
end
end
plot(p,xlims = (-15,15))
結果は次のとおりです。
