それを好きになることを忘れないでください、あなたが質問をするならばメッセージを残してください
序文
組み込み開発では、シリアルポートを介してデバッグ情報を出力するためによく使用されます。コストを節約するために、追加のシリアルポートが利用できない場合があります。したがって、デバッグ情報を印刷できます。
方法1:プロジェクトにSEGGER_RTTデバッグ印刷を追加する
方法2:シリアルポートをシミュレートする
UARTの動作原理
UARTは、シリアル通信方式であるUniversal Asynchronous Receiver andTransmitterの略です。データ伝送の過程で、1つずつ伝送することで通信を実現します。シリアル通信方式は、伝送線路が少なく、コストが安いというメリットがあり、速度が遅いというデメリットがあります。シリアル通信は、同期通信と非同期通信の2種類に分けられます。ただし、主に受信クロックと送信クロックを独立させることができるため、非同期通信方式が一般的に使用されます。これは、送信と受信の柔軟性を高めるのに役立ちます。非同期通信は文字ごとの伝送であり、文字の情報はスタートビット、データビット、パリティビット、ストップビットで構成されます。
各文字の送信はスタートビットによって同期されます。文字の最初のビットはスタートビットであり、立ち下がりエッジは受信者に送信を開始するように通知するために使用されます。データビットはスタートビットの直後にあり、送信中、下位ビットは上位ビットの前にあります。文字自体は5〜8データビットで構成されます。データビットの後にパリティビットが続き、最後にストップビットが続きます。ストップビットはハイレベルを使用して文字の終わりをマークし、次の文字の送信の準備をします。ストップビットの後には、長さの異なるアイドルビットが続きます。ストップビットとアイドルビットの両方がハイレベルとして定義されているため、スタートビットの立ち下がりエッジを保証できます。
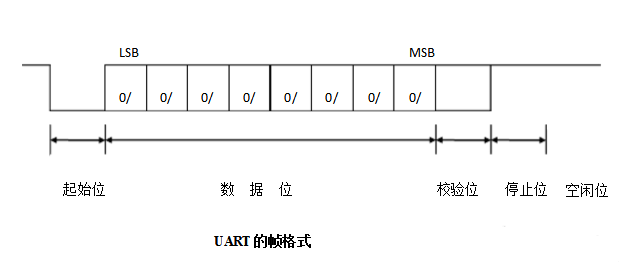
UARTのフレームフォーマットを図に示します。UARTのフレームフォーマットには、ラインアイドル状態(アイドル、ハイレベル)、スタートビット(スタートビット、ローレベル)、5〜8データビット、パリティビット、オプション)、およびストップが含まれます。ビット(ストップビット、ビット数は1、1.5、2にすることができます)。
UARTシミュレーションの原理
UARTのアナログモードは基本的にタイマー+ IOポートによって実現されます。
オプション1:印刷のみで受信しない
実際にデータを受信せずにログを印刷するためだけに使用する場合は、DWTと通常のIOポートを使用できます。
#define VCOM_BOUND 115200
#define VCOM_PIN GPIO_Pin_11
#define VCOM_PORT GPIOA
#define VCOM_PIN_HIGH VCOM_PORT->BSRR = VCOM_PIN
#define VCOM_PIN_LOW VCOM_PORT->BRR = VCOM_PIN
#define BSP_REG_DEM_CR (*(volatile unsigned int *)0xE000EDFC) //DEMCR寄存器
#define BSP_REG_DWT_CR (*(volatile unsigned int *)0xE0001000) //DWT控制寄存器
#define BSP_REG_DWT_CYCCNT (*(volatile unsigned int *)0xE0001004) //DWT时钟计数寄存器
#define BSP_REG_DBGMCU_CR (*(volatile unsigned int *)0xE0042004)
#define DEF_BIT_00 0x01u
#define DEF_BIT_24 0x01000000u
#define BSP_BIT_DEM_CR_TRCENA DEF_BIT_24
#define BSP_BIT_DWT_CR_CYCCNTENA DEF_BIT_00
static unsigned int sys_clock = 48000000;
inline void dwt_start(void)
{
BSP_REG_DEM_CR |= (unsigned int)BSP_BIT_DEM_CR_TRCENA;
BSP_REG_DWT_CYCCNT = (unsigned int)0u; //初始化CYCCNT寄存器
BSP_REG_DWT_CR |= (unsigned int)BSP_BIT_DWT_CR_CYCCNTENA; //开启CYCCNT
}
inline void dwt_stop(void)
{
BSP_REG_DWT_CR = 0;
}
void vcom_pin_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = VCOM_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(VCOM_PORT, &GPIO_InitStructure);
GPIO_SetBits(VCOM_PORT,VCOM_PIN);
VCOM_PIN_HIGH;
}
void vcom_put_char(char ch)
{
int i;
int dat[8];
uint32_t sys_clk, bit_width;
volatile uint32_t time_stamp;
sys_clk = sys_clock/1000000;
bit_width = 1000000*sys_clk/VCOM_BOUND;
for(i=0; i<8; i++)
{
if(ch & 0x01)
dat[i] = 1;
else
dat[i] = 0;
ch >>= 1;
}
OS_CPU_SR cpu_sr;
enter_critical();//以下代码进行临界保护,防止被中断打断造成发送误码
dwt_start();
VCOM_PIN_LOW; //发送起始位
time_stamp = BSP_REG_DWT_CYCCNT;
while(BSP_REG_DWT_CYCCNT < (time_stamp+bit_width));
for(i=0; i<8; i++)
{
if(dat[i])
VCOM_PIN_HIGH;
else
VCOM_PIN_LOW;
time_stamp = BSP_REG_DWT_CYCCNT;
while(BSP_REG_DWT_CYCCNT < (time_stamp+bit_width)); //发8bit 数据位
}
VCOM_PIN_HIGH;
time_stamp = BSP_REG_DWT_CYCCNT;
while(BSP_REG_DWT_CYCCNT < (time_stamp+bit_width)); //发停止位
dwt_stop();
exit_critical();
}
void vcom_printf(const char *fmt, ...)
{
char buf[0x80];
int i;
va_list ap;
memset(buf, 0x00, sizeof(buf));
va_start(ap, fmt);
vsnprintf(buf, sizeof(buf), fmt, ap);
va_end(ap);
i = 0;
while(buf[i])
{
vcom_put_char(buf[i]);
i++;
}
}
オプション2:半二重UART
実装方法:通常のタイマー+通常のIOポート割り込み+ fifo
/**
*软件串口的实现(IO模拟串口)
* 波特率:9600 1-8-N
* TXD : PC13
* RXD : PB14
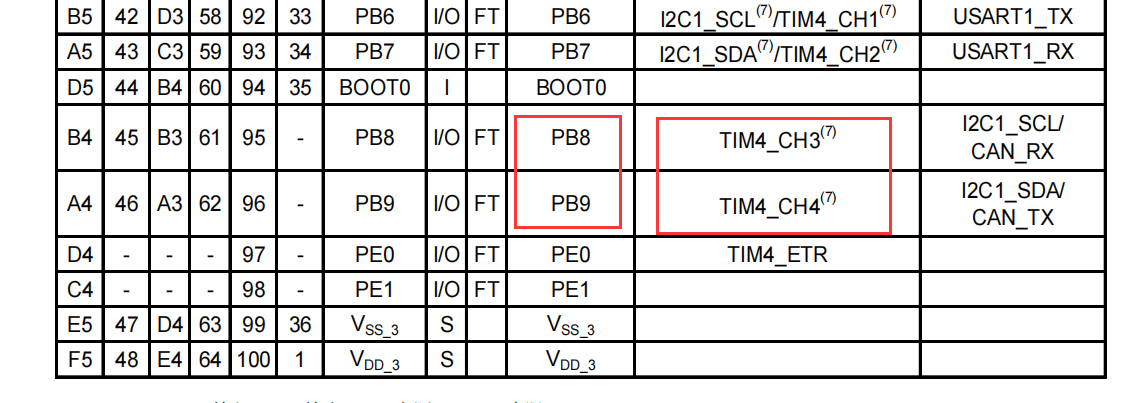
* 使用外部中断对RXD的下降沿进行触发,使用定时器4按照9600波特率进行定时数据接收。
* Demo功能: 接收11个数据,然后把接收到的数据发送出去
*/
#define OI_TXD PCout(13)
#define OI_RXD PBin(14)
#define BuadRate_9600 100
u8 len = 0; //接收计数
u8 USART_buf[11]; //接收缓冲区
enum{
COM_START_BIT,
COM_D0_BIT,
COM_D1_BIT,
COM_D2_BIT,
COM_D3_BIT,
COM_D4_BIT,
COM_D5_BIT,
COM_D6_BIT,
COM_D7_BIT,
COM_STOP_BIT,
};
u8 recvStat = COM_STOP_BIT;
u8 recvData = 0;
void IO_TXD(u8 Data)
{
u8 i = 0;
OI_TXD = 0;
delay_us(BuadRate_9600);
for(i = 0; i < 8; i++)
{
if(Data&0x01)
OI_TXD = 1;
else
OI_TXD = 0;
delay_us(BuadRate_9600);
Data = Data>>1;
}
OI_TXD = 1;
delay_us(BuadRate_9600);
}
void USART_Send(u8 *buf, u8 len)
{
u8 t;
for(t = 0; t < len; t++)
{
IO_TXD(buf[t]);
}
}
void IOConfig(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC, ENABLE); //使能PB,PC端口时钟
//SoftWare Serial TXD
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_13);
//SoftWare Serial RXD
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);
EXTI_InitStruct.EXTI_Line = EXTI_Line14;
EXTI_InitStruct.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger=EXTI_Trigger_Falling; //下降沿触发中断
EXTI_InitStruct.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStruct);
NVIC_InitStructure.NVIC_IRQChannel= EXTI15_10_IRQn ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void TIM4_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //时钟使能
//定时器TIM4初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ClearITPendingBit(TIM4, TIM_FLAG_Update);
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
//中断优先级NVIC设置
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM4中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级1级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //从优先级1级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init();
IOConfig();
TIM4_Int_Init(107, 71); //1M计数频率
while(1)
{
if(len > 10)
{
len = 0;
USART_Send(USART_buf,11);
}
}
}
void EXTI15_10_IRQHandler(void)
{
if(EXTI_GetFlagStatus(EXTI_Line14) != RESET)
{
if(OI_RXD == 0)
{
if(recvStat == COM_STOP_BIT)
{
recvStat = COM_START_BIT;
TIM_Cmd(TIM4, ENABLE);
}
}
EXTI_ClearITPendingBit(EXTI_Line14);
}
}
void TIM4_IRQHandler(void)
{
if(TIM_GetFlagStatus(TIM4, TIM_FLAG_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_FLAG_Update);
recvStat++;
if(recvStat == COM_STOP_BIT)
{
TIM_Cmd(TIM4, DISABLE);
USART_buf[len++] = recvData;
return;
}
if(OI_RXD)
{
recvData |= (1 << (recvStat - 1));
}else{
recvData &= ~(1 << (recvStat - 1));
}
}
}
参照コード:https://github.com/sckuck-bit/SoftWareSerial
オプション2:全二重UART
実現アイデア:タイマーのキャプチャと比較を採用し、IOに対応するタイマーを必要とする
コード:少し
結論として
串口打印会占用CPU,调试完成记得关闭调试信息。