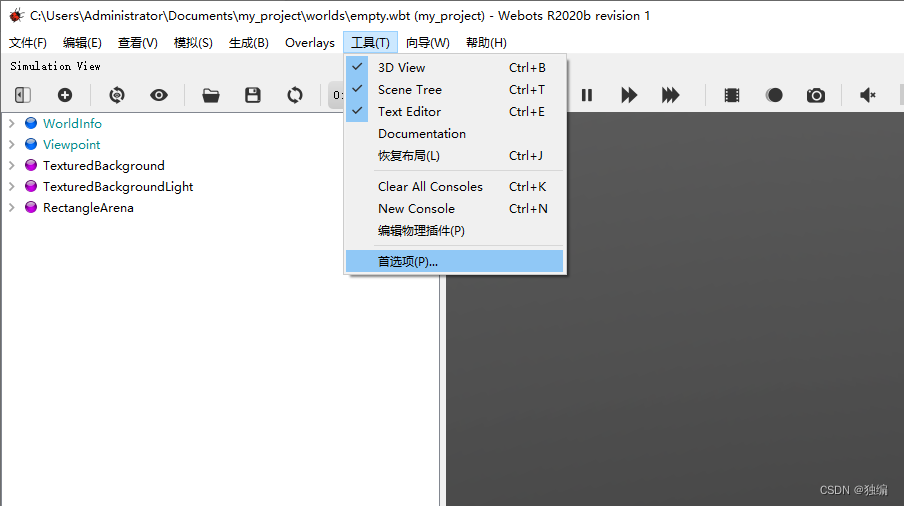
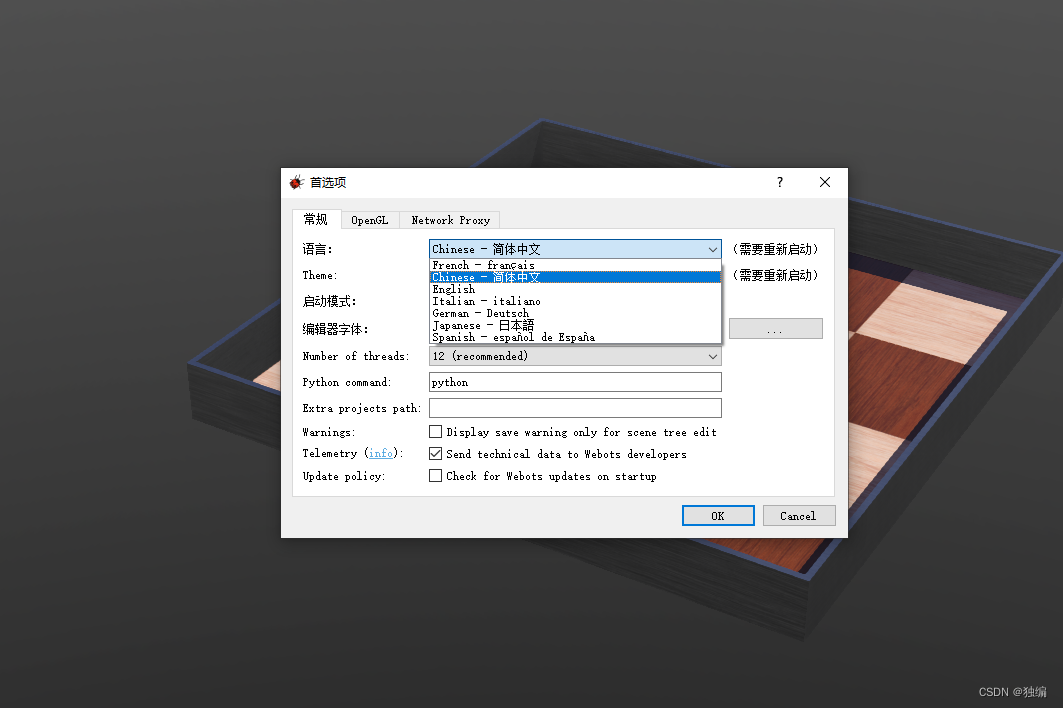
1. Ändern Sie die Sprache des Webbots auf Chinesisch
2. Baue eine neue Welt
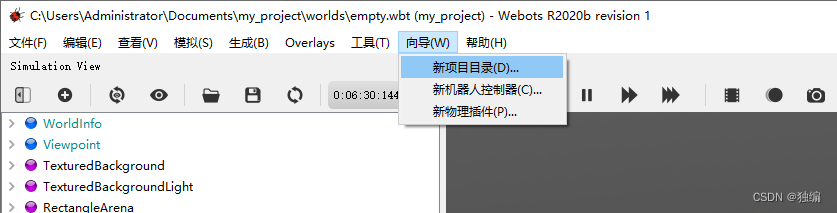
Folgen Sie dann den Anweisungen zum nächsten Schritt → wählen Sie den Pfad zum Speichern der Datei aus → aktivieren Sie „Eine rechteckige Arena hinzufügen“ → schließen Sie die Erstellung ab
3. Erstellen Sie ein Objekt (Zylinder, Würfel usw.)
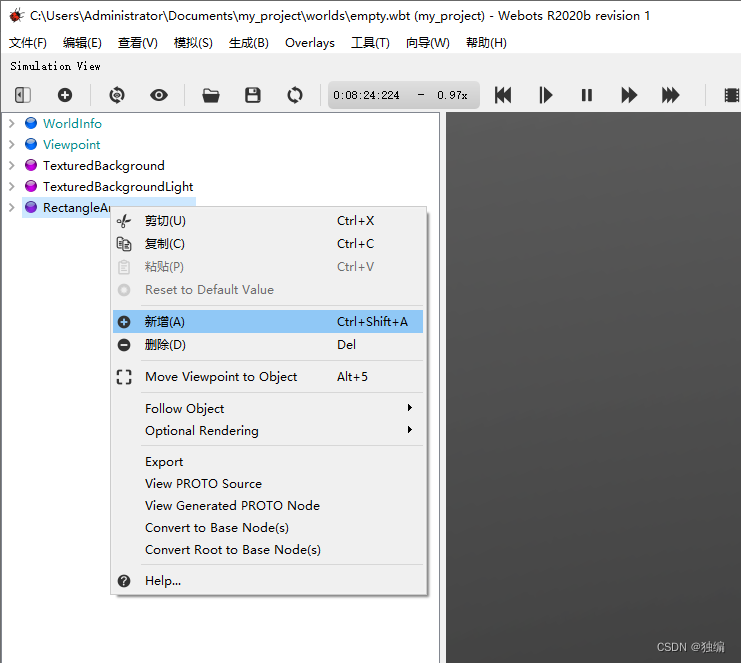
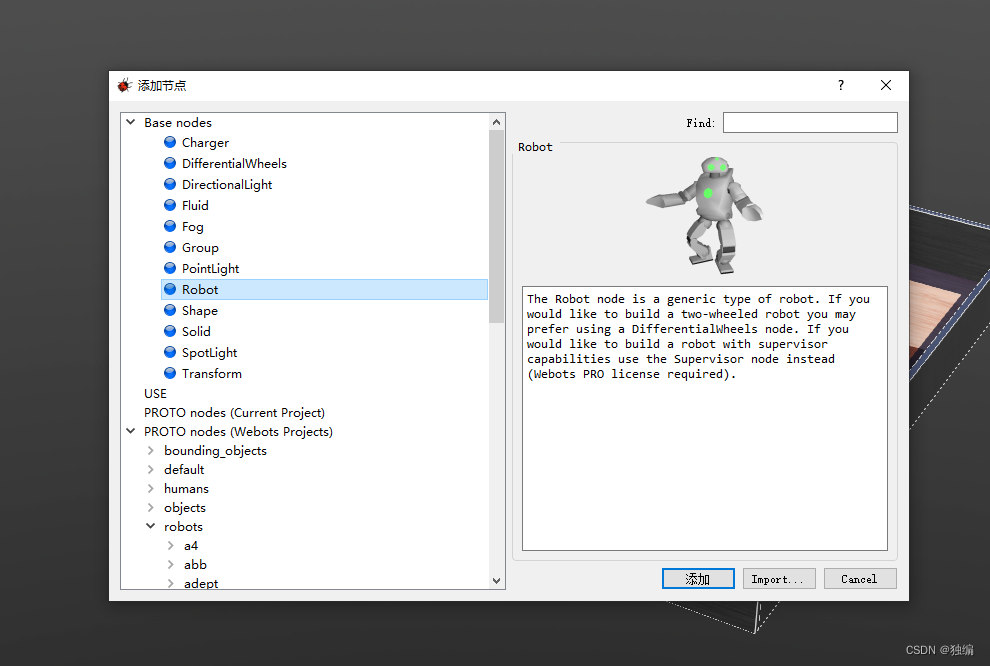
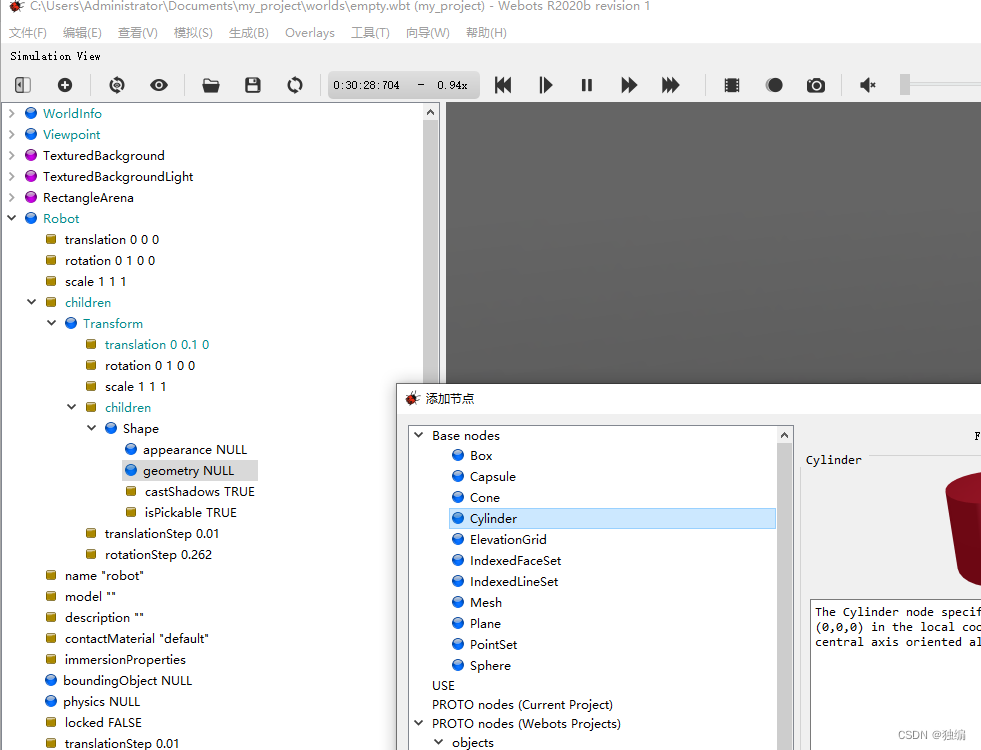
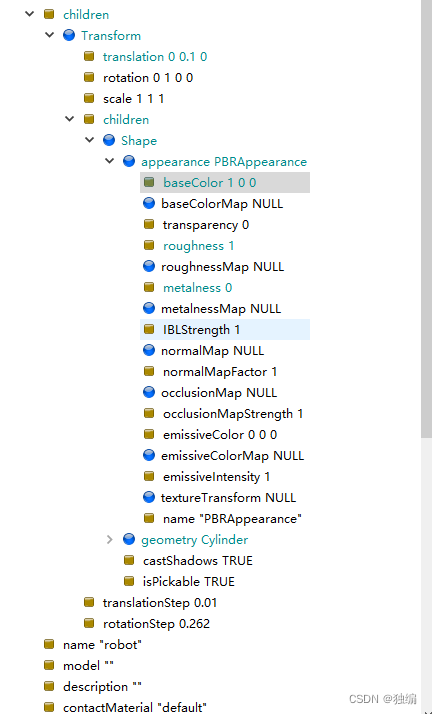

Benennen Sie „Form“ in „Körper“ um und setzen Sie „bracingObject“ auf „Körper“.
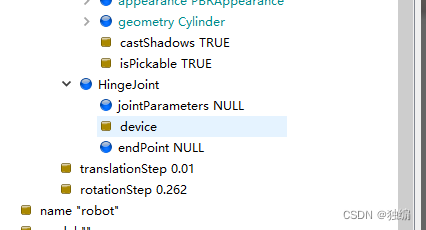
4. Erstellen Sie ein Scharnier
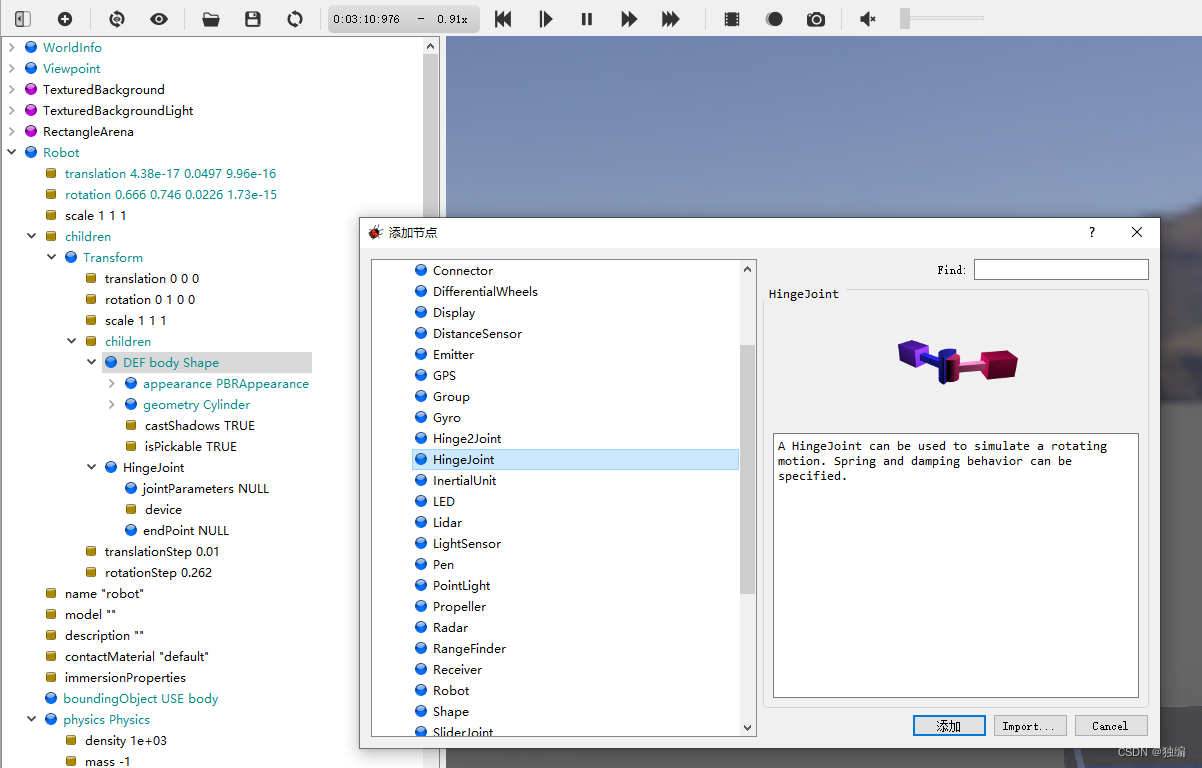
Erstellen Sie ein neues Scharnier im Körper und öffnen Sie dann den neu hinzugefügten HingeJoint-Knoten. Es gibt drei Eigenschaften darin: Die erste ist für den Hauptknoten, das zweite Gerät wird zum Hinzufügen eines Motors verwendet und der dritte Endknoten ist der Knoten, an dem das Rad hinzugefügt werden soll.
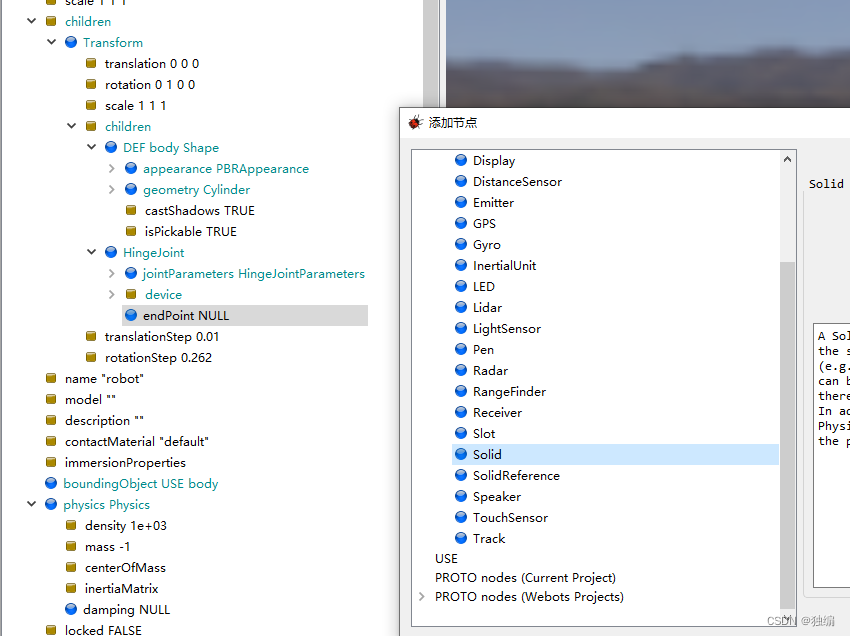
Fügen Sie Knoten wie folgt hinzu

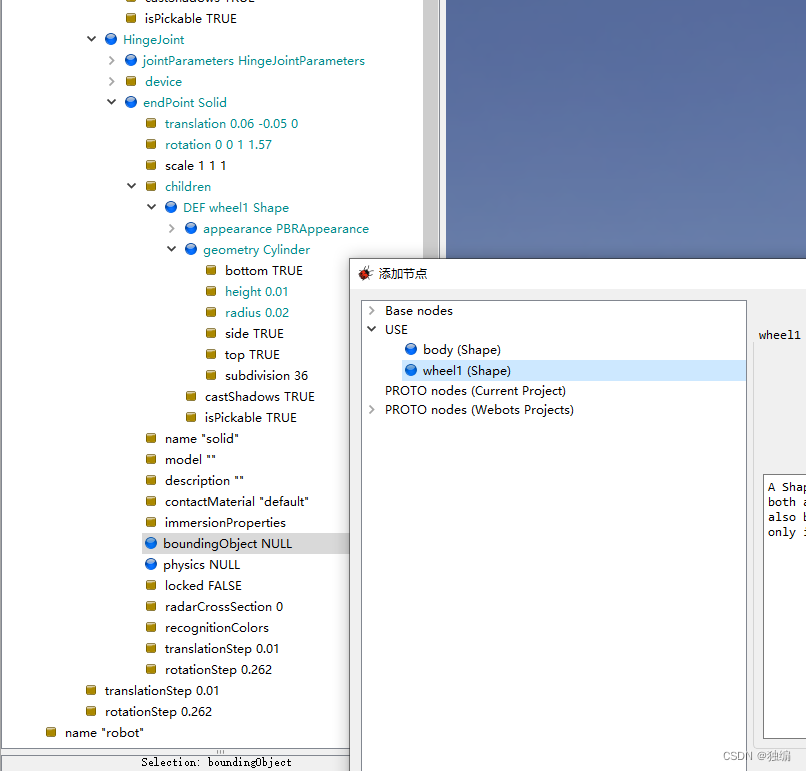
Fügen Sie dem Endknoten Räder hinzu. Der Vorgang ist wie folgt
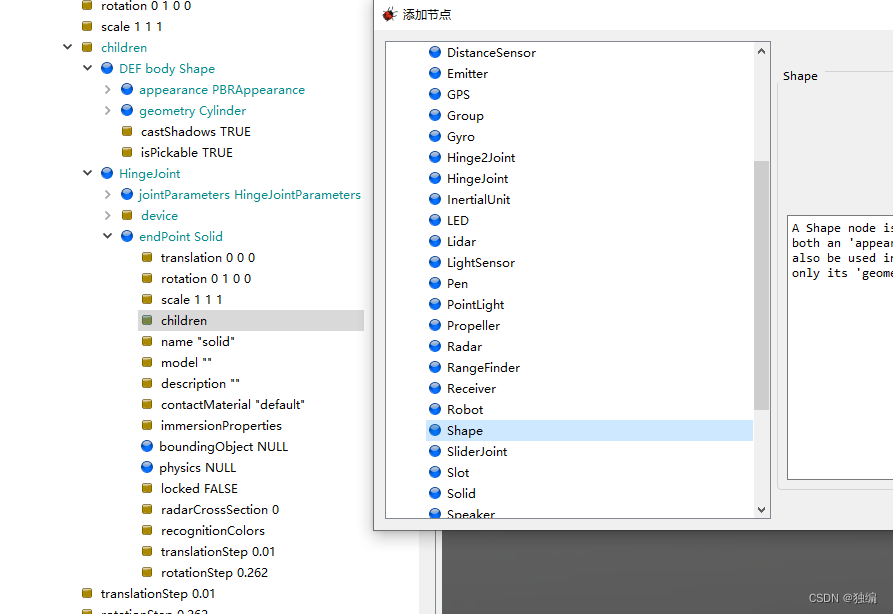
Die restlichen Schritte sind die gleichen wie oben. Ändern Sie nach Abschluss die Translations- und Rotationsattribute des Solid-Knotens und platzieren Sie das Rad an der angegebenen Position.
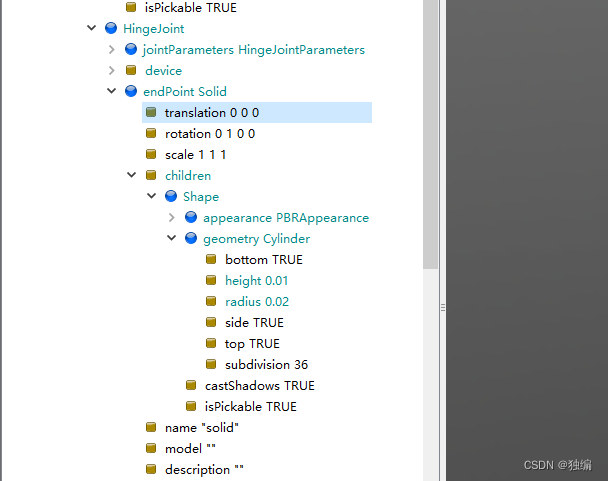
Ändern Sie dann den Namen des neu hinzugefügten Shape-Knotens. Dies ist vorbereitet, um dem endPoint-Knoten Grenzattribute hinzuzufügen. Fügen Sie nach dem Hinzufügen des BoundingObject die physikalischen Attribute hinzu und ändern Sie auch den Namen des Physikattributs.
Führen Sie als Nächstes die Schlüsseloperation des Scharniers aus und kopieren Sie den Übersetzungswert im Endpunkt als festen Ankerpunkt in den Anker.

Ändern Sie dann die Achse (Rotationsachse) und testen Sie, ob sie korrekt ist, indem Sie die Position anpassen.
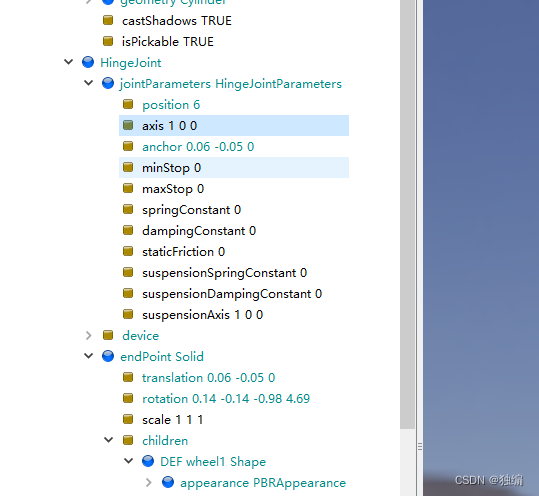
Anschließend können Sie hingejoint direkt kopieren und den Wert ändern, um ein anderes Rad zu erhalten.
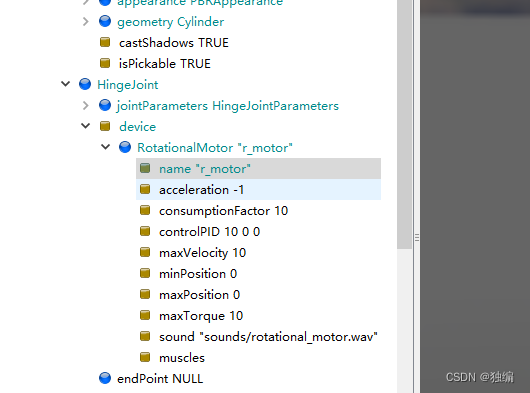
5. Motor verwenden
Der Rotationsmotor im Gerät im Bild unten ist ein rotierender Motor. Ändern Sie seinen Namen, um spätere Aufrufe zu erleichtern.
6. Verschiedene Sensoren
Sie können dem Roboter einen Sensor hinzufügen, nachdem Sie einen Festkörper hinzugefügt haben, und den Sensor am hinzugefügten Festkörper befestigen.