instalación y uso de evo
1. instalación evo
Hay dos métodos de instalación para evo.
1. Instalación rápida, instale directamente la última versión estable:
pip install evo --upgrade --no-binary evo2. Instalación del código fuente, descargue el código fuente para la instalación:
Primero descargue evo en cualquier carpeta, o puede descargarlo directamente en casa
git clone https://github.com/MichaelGrupp/evo.gitLuego vaya a la carpeta evo, abra la terminal y ejecute:
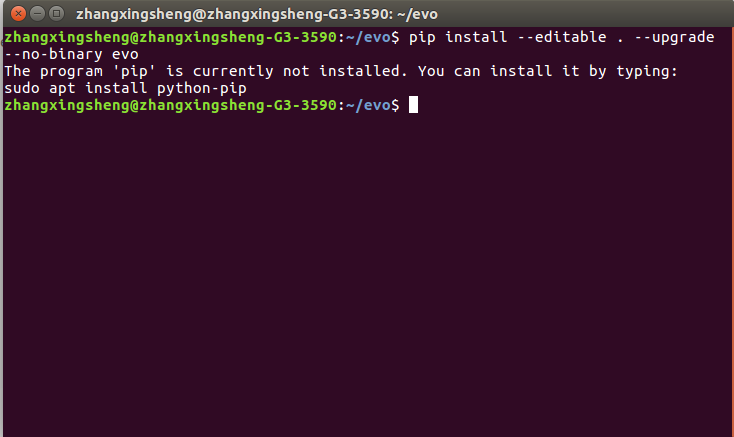
pip install --editable . --upgrade --no-binary evoAquí estoy usando el segundo método de instalación y algunos de los problemas encontrados se registran a continuación:
Problema 1: tiempo de espera de descarga de git clone
Cuando encuentre un tiempo de espera al usar git clone para descargar archivos evo, puede ingresar directamente desde la URL:
https://github.com/MichaelGrupp/evoLuego descárguelo directamente.

Pregunta 2: La ejecución del comando de instalación de pip muestra que pip no está instalado.
Esto se puede instalar ejecutando el siguiente comando directamente:
sudoaptinstall python-pipNota: pip es el comando correspondiente a la versión python2 y python ejecuta pip3
Problema 3: la versión de pip es baja
Después de instalar pip, encontré el siguiente problema al ejecutar nuevamente el comando de instalación anterior:

El error muestra que la versión de pip que instalé es inferior a la versión requerida y la forma sugerida de actualizar se detalla a continuación. Pero ejecuto el siguiente comando de instalación:
pip install --upgrade pipEncontré la siguiente situación:
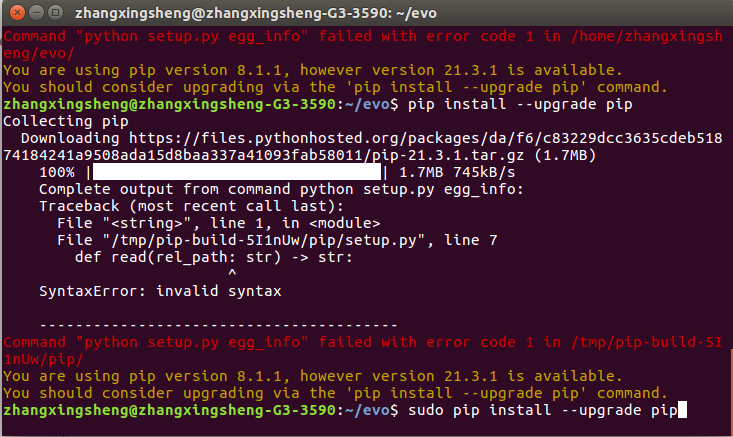
¿El resultado no sirve de nada? ? ? Crazy Baidu buscó durante mucho tiempo y finalmente encontró la solución:
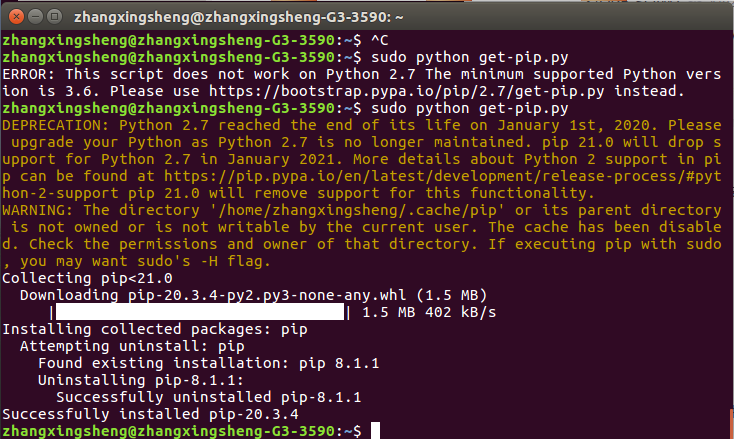
Utilice el método de instalación manual:
sudoapt-get update
sudoapt-get upgrade
wget https://bootstrap.pypa.io/get-pip.py
sudo python get-pip.py
pip --versionEste método proviene del blog de ykwjt , pero hubo ciertos problemas cuando lo ejecuté:
zhangxingsheng@zhangxingsheng-G3-3590:~$ sudo python get-pip.py
ERROR: This script does not work on Python 2.7 The minimum supported Python version is 3.6. Please use https://bootstrap.pypa.io/pip/2.7/get-pip.py instead.Aquí está el problema con la versión del archivo descargado de la URL en el tercer paso anterior. Elimínelo y modifíquelo al archivo en la URL a continuación y luego vuelva a ejecutar el cuarto paso:
Pregunta 4. Ejecute el comando de instalación nuevamente. Muestra que la instalación fue exitosa pero hay dos errores:
Una vez completada la instalación, se muestran problemas de versión con dos cosas:
ERROR: pip's legacy dependency resolver does not consider dependency conflicts when selecting packages. This behaviour is the source of the following dependency conflicts.
pandas 0.24.2 requires numpy>=1.12.0, but you'll have numpy 1.11.0 which is incompatible.
seaborn 0.9.1 requires matplotlib>=1.5.3, but you'll have matplotlib 1.5.1 which is incompatible.
Successfully installed argcomplete-1.12.3 colorama-0.4.4 configparser-4.0.2 contextlib2-0.6.0.post1 evo-1.12.0 importlib-metadata-2.1.1 natsort-6.2.1 pandas-0.24.2 pathlib2-2.3.6 python-dateutil-2.8.2 scandir-1.10.0 scipy-1.2.3 seaborn-0.9.1 zipp-1.2.0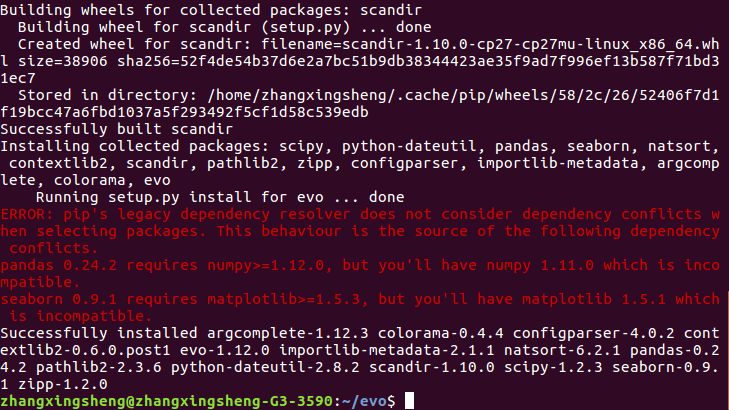
Este es un error causado por las versiones de numpy y matplotlib que son demasiado bajas. Ejecute los siguientes comandos para actualizar estas dos herramientas:
pip install numpy --upgrade --user
pip install matplotlib --upgrade --user2. prueba evo
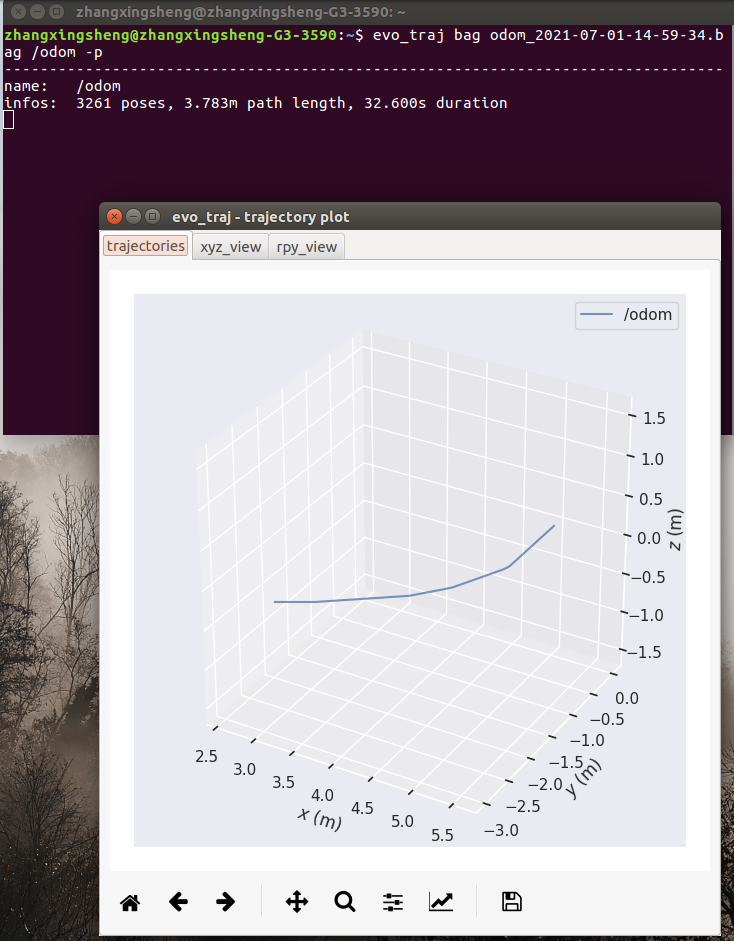
evo admite tres formatos de conjuntos de datos públicos: kitti, tum y euroc, y también admite temas en archivos bag. Aquí hay una prueba usando la trayectoria de un archivo de bolsa:
El formato de sintaxis específico de evo_traj:
evo_traj bag文件 话题名1 话题名2 .... 话题名n [参数]Ejecute el comando de la siguiente manera:
evo_traj bag odom_20201-07-01-14-59-34.bag /odom -pEl efecto es el siguiente:
Documentación de referencia:
1 、
https://blog.csdn.net/weixin_44386661/article/details/1030805512 、
https://blog.csdn.net/ykwjt/article/details/1058460713 、
https://blog.csdn.net/A_L_A_N/article/details/88708979?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~default-1.no_search_link&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~default-1.no_search_link4 、
https://blog.csdn.net/qq_43247439/article/details/1128021045 、
https://blog.csdn.net/qq_39779233/article/details/1075820596 、
https://zhuanlan.zhihu.com/p/882231067 、
https://blog.csdn.net/hhaowang/article/details/105226136Declaración de derechos de autor: este artículo es un artículo original del blogger y sigue el acuerdo de derechos de autor CC 4.0 BY-SA . Adjunte el enlace de la fuente original y esta declaración al reimprimir.
本文链接:https://blog.csdn.net/YiYeZhiNian/article/details/120941694
Post navigation
在虚拟机中对阿克曼转向车进行导航及避障的仿真测试-爱代码爱编程
一种slam精度评定工具——evo使用方法详解-爱代码爱编程
2019-10-09 分类: SLAM 视觉 evo 精度评定
evo工具github链接:link evo_ape 计算绝对位姿误差 绝对位姿误差,常被用作绝对轨迹误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。 命令语法:命令 格式 参考轨迹 估
测评工具evo安装与使用-爱代码爱编程
2019-11-15 分类: SLAM 建图与重定位 slam测评 测评
slam测评工具——evo的安装及使用 evo简介evo安装常见问题evo使用**几个常用的evo工具为:**evo_traj:直接画出轨迹evo_ape:绝对位姿误差的计算evo_rpe:相对位姿误差的计算其他参数 evo简介 evo是一个很好的测评工具,它可以根据时间戳将轨迹进行对齐,同时可以将不同尺度的轨迹按照你指定的标准轨迹进行拉伸对
evo测评工具的安装使用和常见问题-爱代码爱编程
2019-12-04 标签: 文件格式分类: VSLAM evo tum
Ubuntu16.04 evo的安装与使用教程 一. 安装 1.安装&&升级numpy sudo pip install numpy -I 2.检查user权限 sudo pip install . --user --upgrade 3.pip安装evo pip install . --upgrade --no-binary
evo安装、evo使用方法详细介绍使用教程,SLAM轨迹精度评估工具,如何用来评估ORB-SLAM2生成的轨迹精度,评估激光雷达SLAM与视觉SLAM的轨迹精度,量化SLAM的误差-爱代码爱编程
2020-03-01 标签: linux ubuntu分类: SLAM 常用工具 3d成像
evo在视觉SLAM中是一个极为有用的工具,对于论文党、科研党、工程党都非常有帮助,它可以用于评估SLAM输出的轨迹的精度,可以自动生成均值、方差、轨迹等等信息的图或者表,总之评估SLAM精度用它足以。 它目前支持的公开数据集格式有:“TUM”、“KITTI”、“EuRoC MAV"以及"ROS bagfile”。如果你使用的数据集格式为这些中的
EVO的安装-爱代码爱编程
2020-04-29 分类: SLAM ubuntu下安装包安装
初步学习可以根据下面的链接找到更多资源:官方地址 用evo工具评估SLAM轨迹 第一步:终端输入: pip install evo --upgrade --no-binary evo 报错: Collecting evo Downloading https://files.pythonhosted.org/packages/d2/01/1f
EVO评估工具使用技巧-爱代码爱编程
2020-08-18 分类: slam实验
EVO评估工具使用技巧 在SLAM的轨迹对比中,EVO是一个非常好的工具。参考博客:【博客】、【ROS map】以及【博客】 安装 基本使用 以上网上都有很多介绍的,在此不再赘述。 常忽略的一些小技巧 1.直接在~/.evo/文件夹下的settings.json文件中设置各种默认参数: 其中包括线宽、背景、尺寸等。 2.灵活应用-a、-s、-
关于jupyter notebook使用过程中的一些排错-爱代码爱编程
2020-11-21 标签: python 深度学习 kernel分类: 深度学习
关于jupyter notebook使用过程中的一些排错 1:使用jupyter notebook不能中断正在运行的程序 解决办法:打开conda Promet进入自己的环境,输入pip3 install --upgrade --force-reinstall --no-cache-dir jupyter这句话,在运行这句话的过程中可能会出现这样的报错信
ERROR: pip‘s dependency resolver does not currently take into account all the packages that are inst-爱代码爱编程
安装包的时候出现报错:ERROR: pip’s dependency resolver does not currently take into account all the packages that are installed. This behaviour is the source of the following dependency conf
evo安装,使用及报错处理-爱代码爱编程
2021-05-04 分类: 工具 SLAM python evo
evo安装,使用及报错处理 本人(ubuntu18.04)最近从事视觉slam研究,需要使用evo评估轨迹。记录一下踩过的一些坑,供大家交流参考。 evo安装 事先声明,evo需要python版本3.6+或者py2.7 1.12.0。 安装依赖: sudo apt-get install libfreetype6-dev gfortran sud
ubuntu16.04 mobsf 配置指南-爱代码爱编程
2021-08-02 分类: 安全开发
一、安装需要内容 (1) 安装必要文件 sudo apt update sudo apt install software-properties-common sudo add-apt-repository ppa:deadsnakes/ppa sudo apt install python3.8 python3.8-venv (2)配置 pyt