1. Topología del sistema KNX
La red KNX es una red distribuida completamente de igual a igual y todos los dispositivos conectados a la red tienen el mismo estado. Su topología de red es la siguiente:
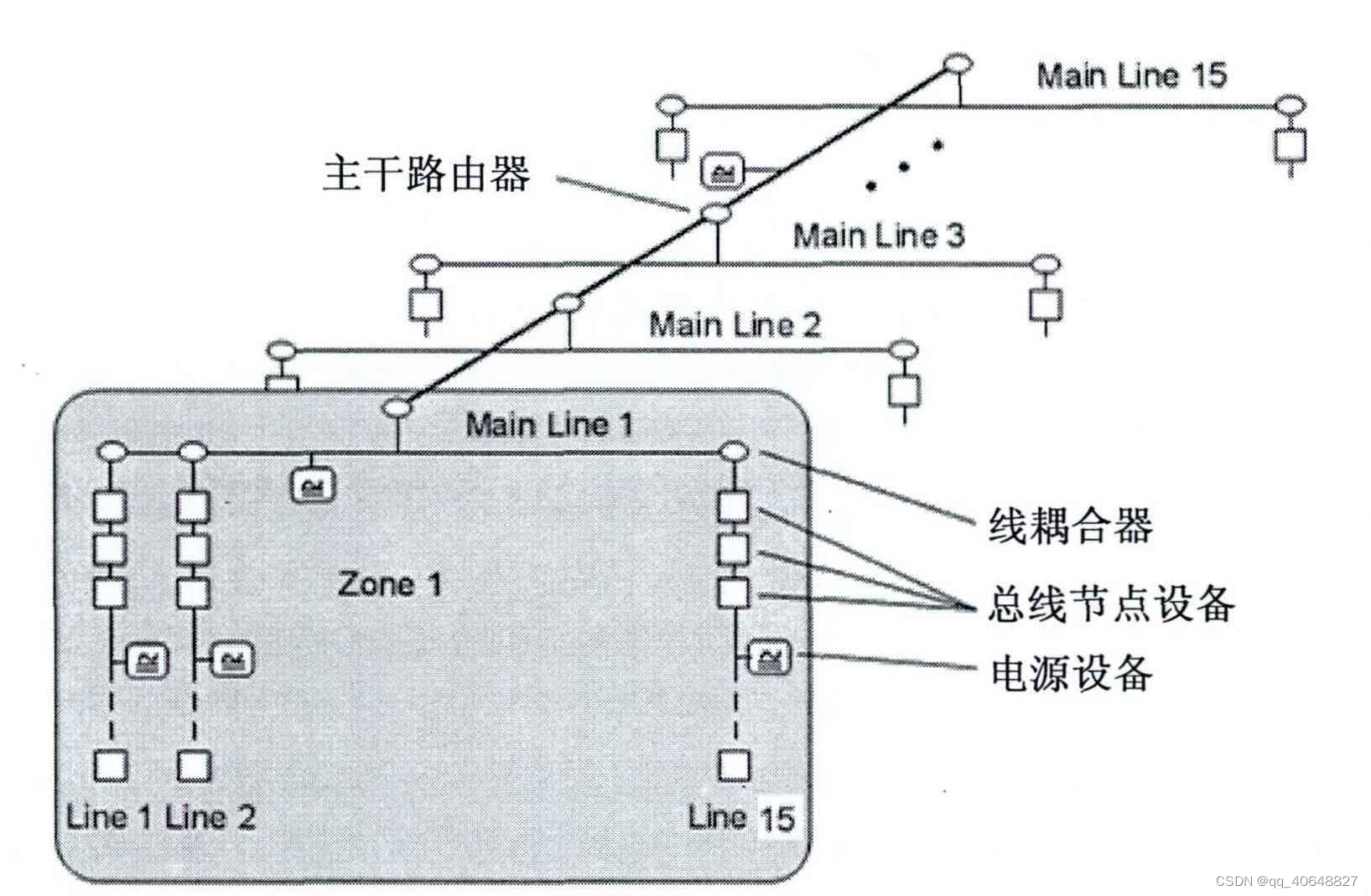
La unidad de instalación más pequeña del sistema KNX es una línea. Cada línea puede conectar hasta 64 componentes de bus y puede ampliarse a 255 componentes mediante un repetidor de línea. Cuando el bus conecta más de 255 componentes de bus o necesita Al elegir una estructura diferente, Los acopladores de línea (Line Coupler) se pueden usar para conectar 15 líneas para formar una unidad topológica más grande llamada dominio; cada línea está conectada a la línea principal a través de LC, y la línea principal requiere un equipo de suministro de energía del sistema. El acoplador de dominio (Backbone Line Coupler) puede conectar 15 dominios entre sí para formar un área. El área, dominio y línea corresponden a la dirección física del componente. El formato de dirección es ABC, y el rango de A, B y C también es obvio. Ocupa un total de dos bytes. El formato de dirección es el siguiente. :

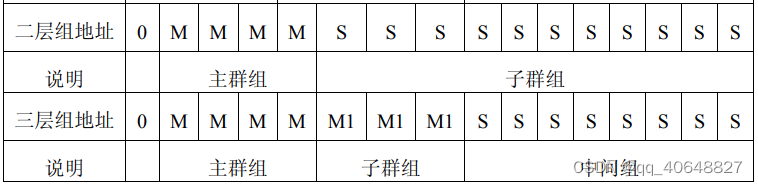
Para realizar una comunicación uno a muchos entre dispositivos de bus, el dispositivo KNX proporciona una dirección de grupo, de modo que cuando un nodo envía datos, varios nodos con la misma dirección de grupo puedan recibirlos y realizar las acciones correspondientes. El mismo dispositivo puede tener varias direcciones de grupo y varios dispositivos pueden tener la misma dirección de grupo. Las direcciones de grupo se pueden dividir en formatos de dirección de dos capas (grupo principal, subgrupo) y tres capas (grupo principal, subgrupo, grupo intermedio). El formato de dirección es el siguiente:
2. Características de la tecnología de transmisión KNX
El sistema KNX es un sistema de bus distribuido basado en eventos . Todos los dispositivos de nodo del sistema KNX deben estar conectados a la línea de conexión de transmisión en serie KNX (generalmente el llamado bus) para interactuar y transmitir datos a través del bus. Al mismo tiempo, la interacción y transmisión de datos deben cumplir con las disposiciones estándar. del protocolo de bus KNX. La información a enviar, o un mensaje, primero debe empaquetarse en el formato de mensaje estándar KNX, y luego transmitirse desde un nodo de dispositivo sensor (remitente de mensaje) a uno o más nodos de dispositivo controlador (receptores de mensajes) a través del bus KNX, estos Los nodos del dispositivo controlador descomponen y analizan la información del mensaje recibido para implementar ciertas funciones de la aplicación. Uno de los medios del bus KNX es un par trenzado. Los datos y la energía comparten el par trenzado. Cada dispositivo de nodo realiza la separación de los datos y la energía a través de un chip de bus dedicado.
La tecnología de transmisión KNX utiliza como protocolo de control de acceso al bus el protocolo de acceso múltiple Carrier Sense para evitar colisiones (CSMA/CA) , que por un lado no reduce la velocidad de transmisión del bus y, por otro, Por otro lado, garantiza que los mensajes en el bus no colisionen.
(1) Aunque todos los dispositivos nodos en el bus KNX están escuchando y preparándose para recibir información del mensaje de transmisión, solo responderá el dispositivo nodo con la dirección correspondiente. Para enviar un mensaje, el dispositivo nodo primero debe escuchar el bus KNX y esperar a que otros dispositivos nodos que están enviando mensajes completen el envío del mensaje antes de enviarlo, lo que se denomina Carrier Sense (CS).
(2) Una vez que el bus KNX está inactivo, teóricamente, cada dispositivo del nodo KNX puede iniciar el proceso de envío de mensajes, lo que se denomina Acceso Múltiple (MA).
(3) Sin embargo, cuando dos dispositivos de nodo KNX comienzan a enviar información de mensajes KNX al mismo tiempo, el dispositivo de nodo con alta prioridad puede continuar enviando mensajes KNX sin demora, mientras que el dispositivo de nodo con baja prioridad detiene el proceso de envío y espera la siguiente paso reintentos. Si dos dispositivos de nodo tienen la misma prioridad, el dispositivo con una dirección física más baja puede enviar paquetes primero, lo que se denomina prevención de colisiones (CA).
3. Modelo de protocolo KNX
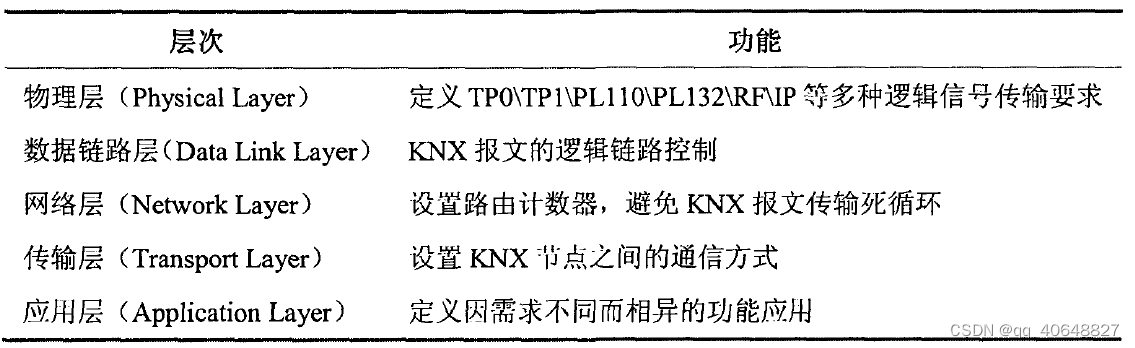
El protocolo KNX sigue la especificación del protocolo de siete capas ISO/OSI, lo que le permite comunicarse bien con otros protocolos basados en el modelo ISO/OSI. El protocolo KNX simplifica el protocolo de siete capas y consta de la capa física, la capa de enlace de datos, la capa de red, la capa de transporte y la capa de aplicación. Conserva la capa de sesión y la capa de presentación. Aquí hay una introducción a cada capa.
3.1 Capa Física
La capa física implementa la transmisión de señales lógicas y envía bits de la trama de datos al bus para su transmisión, cuando se detecta un conflicto, se detiene y ingresa al mecanismo de retransmisión. El sistema KNX ofrece a los comerciantes diferentes opciones de medios de transmisión de capa física. Con la mejora de la disponibilidad del enrutador, combinada con una poderosa tecnología de red, la combinación de acceso a múltiples medios y múltiples configuraciones de proveedores se ha hecho posible.
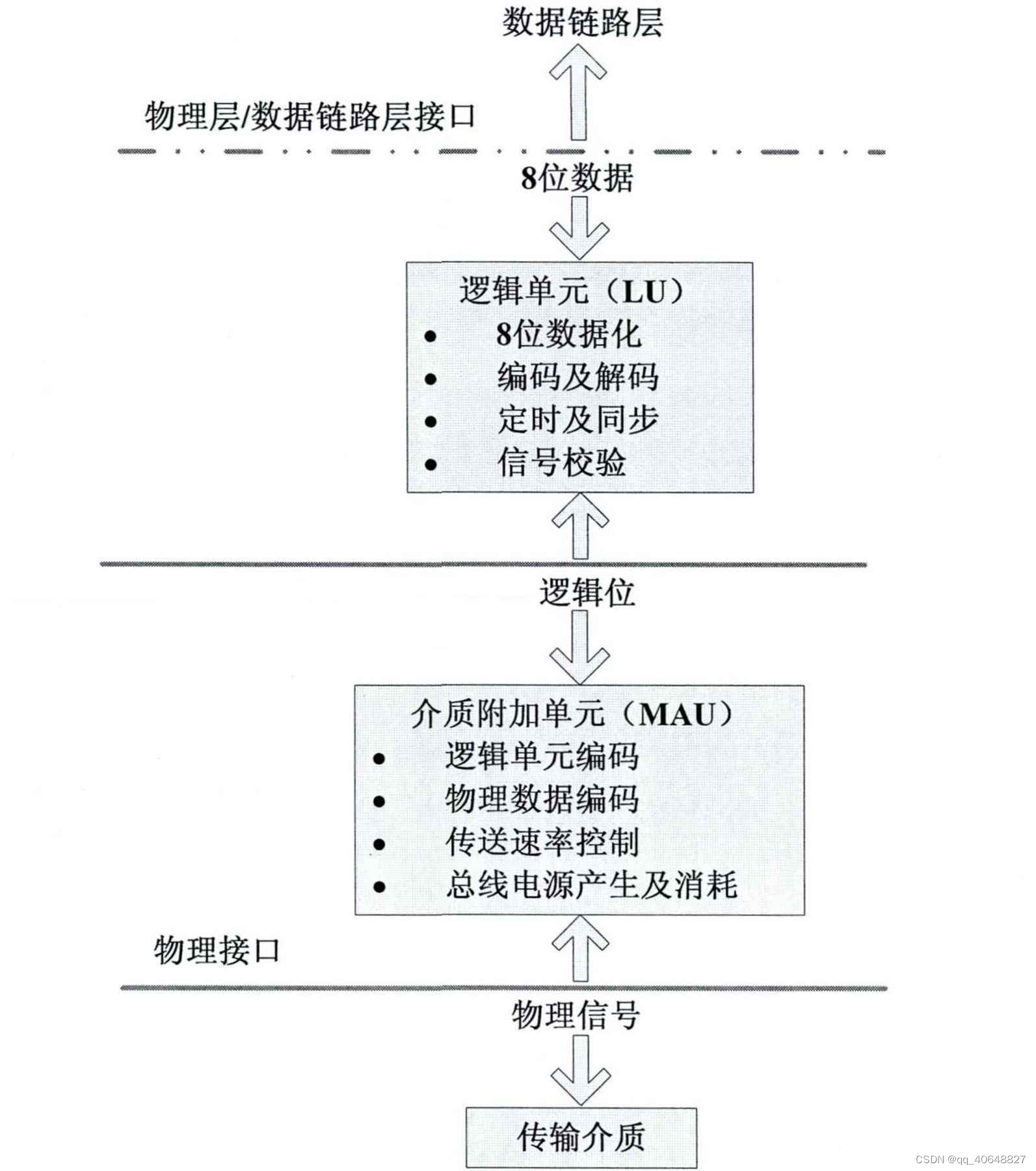
El bus KNX define y estandariza principalmente medios de transmisión como par trenzado, línea eléctrica, radiofrecuencia inalámbrica, IP, etc. Diferentes medios de transmisión corresponden a diferentes unidades adicionales de medios y unidades lógicas de capa física.
3.2 Capa de enlace de datos
La capa de enlace de datos proporciona control de acceso a los medios y control de enlace lógico para garantizar una transmisión confiable de mensajes entre dos o más dispositivos en la misma subred.
Al enviar mensajes, la capa de enlace de datos completa principalmente las siguientes funciones:
-
Combine la información transmitida desde la capa de red en un marco completo
-
Obtenga acceso a los medios según el protocolo de acceso a los medios específico utilizado
-
Utilice servicios de capa física para transmitir mensajes a la capa de enlace de datos en uno o varios dispositivos pares.
Al recibir mensajes, la capa de enlace de datos completa principalmente las siguientes funciones:
-
Determinar si el mensaje está completo
-
Determine si se debe transmitir la trama a la capa superior en función de la dirección de destino
-
Enviar una trama de respuesta a la capa de enlace de datos del transmisor.
Un mensaje KNX contiene varios bytes. El último byte es un byte de verificación, utilizando paridad impar. Si la transmisión se completa, el nodo de red direccionado enviará una trama de respuesta después de un intervalo de 13 bits. Si se dirigen a varios nodos, estos nodos enviarán esta trama de respuesta exactamente al mismo tiempo, pero sólo una trama de respuesta será visible en el bus. Si un nodo no puede recibir, el receptor enviará una trama de respuesta negativa (INAK), el nodo que recibió el mensaje correcto enviará un acuse de recibo positivo (IACK) y el nodo ocupado enviará una respuesta de ocupado (BUSY). cubrir todo INAK, INAK puede cubrir todo IACK. Dado que la trama de respuesta no tiene información de dirección, el remitente no puede saber qué receptor no ha recibido los datos, por lo que cuando el remitente recibe un INAK o BUSY, reenviará el mensaje a todos los nodos.
Se pueden generar dos unidades de datos diferentes en la capa de enlace de datos, denominadas unidades de datos de protocolo de capa de enlace de datos (LPDU), que son telegramas de mensajes y acuses de recibo . Los siguientes presentan respectivamente sus formatos de datos.
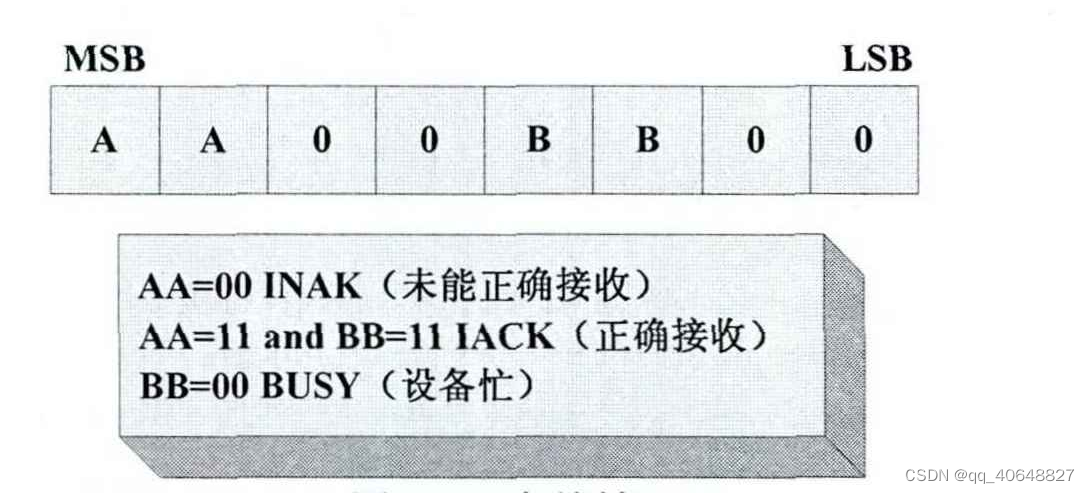
(1)Respuesta
La respuesta es un mensaje enviado por el nodo direccionado después de recibir el mensaje. Cada trama de respuesta solo contiene un byte. Hay tres tipos de respuestas:
-
IACK: El nodo direccionado recibe el mensaje correctamente
-
INAK: El nodo direccionado no pudo recibir el mensaje correctamente.
-
OCUPADO: El dispositivo está ocupado
La prioridad es: BUSY>INAK>IACK, el formato del cuadro es el siguiente:
(2) Mensaje mensaje
El mensaje contiene la información que debe transmitirse en el bus KNX. Se compone principalmente de bytes de control, dirección de origen, dirección de destino, byte de longitud, byte de verificación y unidad de servicio de la capa de enlace de datos. Se compone de la siguiente manera:
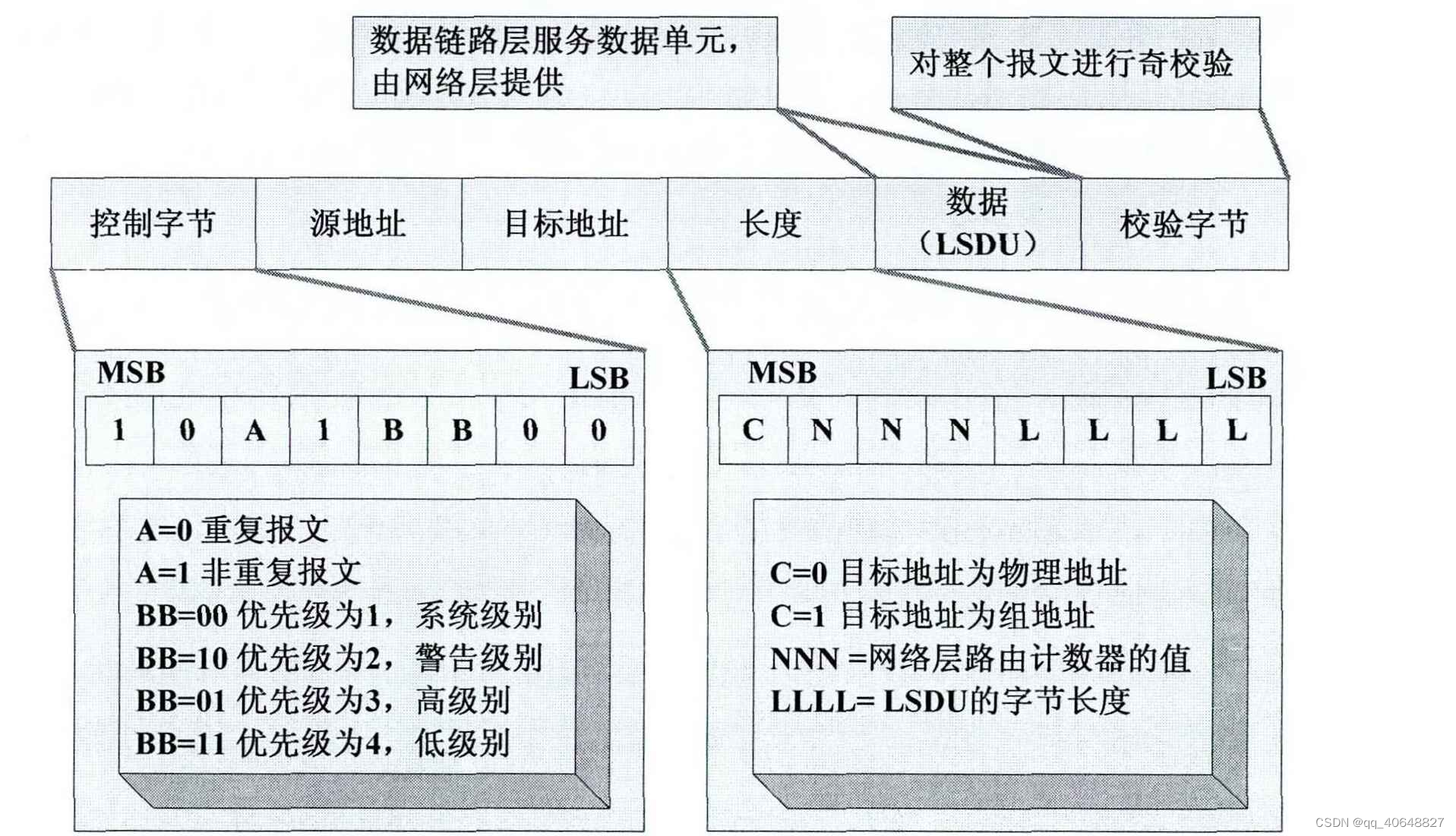
La capa de enlace de datos agrega una serie de información de control de la capa de enlace de datos basada en la unidad de datos de servicio (LSDU) de la capa de enlace de datos para formar el mensaje final. La información de control adicional de la capa de enlace de datos incluye principalmente los siguientes aspectos:
-
Byte de control: Define 2 bits de información de prioridad del mensaje KNX y 1 bit de información sobre si se debe repetir el mensaje.
-
Dirección de origen: Contiene la dirección física del nodo que envía el mensaje , que consta de bytes altos y bajos.
-
Dirección de destino: Contiene la dirección del nodo de destino que recibe el mensaje, esta dirección puede ser una dirección física o una dirección de grupo , la cual está determinada por el bit más alto en el byte de longitud.
-
Longitud: define el tipo de dirección de destino de 1 bit (dirección física o dirección de grupo), la información de longitud de 4 bits de la unidad de datos del servicio de la capa de enlace de datos y la información del contador de enrutamiento de 3 bits (esta información está definida por la capa de red). )
-
Byte de verificación: un byte generado al realizar una paridad impar en todos los bits del mensaje completo.
3.3 Capa de red
La capa de red KNX sólo completa la función de recuento de rutas. Para evitar bucles interminables en el enrutamiento, la capa de red establece contadores de enrutamiento. Cada paquete de datos contiene un contador de enrutamiento de 3 bits. El valor inicial se puede configurar durante la configuración y el valor máximo es 7 . Cada vez que un mensaje KNX pasa a través de un enrutador o acoplador troncal, el contador disminuirá automáticamente en uno. Cuando el valor del conteo llegue a 0, el mensaje abandonará la transmisión. Esto puede resolver el problema del bucle sin fin de mensajes y garantizar de manera efectiva la eficiencia de la comunicación. del autobús KNX.
3.4 Capa de transporte
La capa de transporte es responsable de la transmisión de datos de un extremo a otro y existen dos métodos de transmisión:
(1) Modo de transmisión sin conexión:
Si se utiliza el modo de transmisión sin conexión entre nodos KNX, un mensaje enviado por el nodo emisor se puede transmitir a uno o más nodos de destino con la misma dirección de grupo al mismo tiempo , sin establecer una conexión entre el nodo emisor y el nodo de destino. Este modo de transmisión uno a muchos acorta enormemente el tiempo de transmisión de mensajes, lo que garantiza que el sistema KNX pueda comunicarse de manera eficiente. Supongamos que un nodo en el bus KNX necesita enviar mensajes a múltiples nodos de destino automático con la misma dirección de grupo al mismo tiempo, solo necesita enviar mensajes a la dirección de grupo y luego recibir la señal de confirmación del nodo de destino.
Sin embargo, el modo de transmisión sin conexión también tiene sus desventajas: el sistema KNX no puede confirmar que cada nodo de destino haya recibido el mensaje de destino. El nodo emisor sólo necesita recibir una señal de mensaje recibida correctamente (IACK) y ninguna señal de mensaje recibida incorrectamente (INAK), y el sistema KNX considerará que la transmisión se ha realizado correctamente. Si uno de los nodos de destino se desconecta del bus KNX y no puede enviar una señal de recepción de mensaje correcta o no puede recibir una señal de mensaje correctamente, el sistema KNX no notará la pérdida de señal de este nodo de destino. Por lo tanto, el modo de transmisión sin conexión es adecuado para aplicaciones que no requieren una alta confiabilidad en la transmisión de mensajes KNX.
(2) Modo de transmisión de conexión:
Cuando dos nodos se comunican de esta manera, primero deben establecer una conexión y luego liberarla una vez completada la transmisión. El nodo de origen conoce el estado del nodo de destino en función de la señal de respuesta devuelta y puede detectar la pérdida de paquetes. Este método es particularmente importante cuando se requiere transmisión de mensajes de gran capacidad y transmisión de mensajes importantes.
La transmisión con conexión y sin conexión se puede subdividir en cuatro modos de transmisión de datos diferentes:
1) Multidifusión: modo de comunicación sin conexión punto a multipunto, comunicación a través de direcciones de grupo, realización de control de escenas múltiples de un solo control, etc., lo que permite que el sistema se comunique de manera eficiente;
2) Transmisión: modo de comunicación sin conexión punto a todos, que permite que el dispositivo se comunique con todos los dispositivos del dominio;
3) Comunicación sin conexión punto a punto: comunicación entre dos dispositivos independientes cualesquiera;
4) Comunicación conectada punto a punto: en una conexión, se puede realizar una comunicación confiable entre dos dispositivos cualesquiera
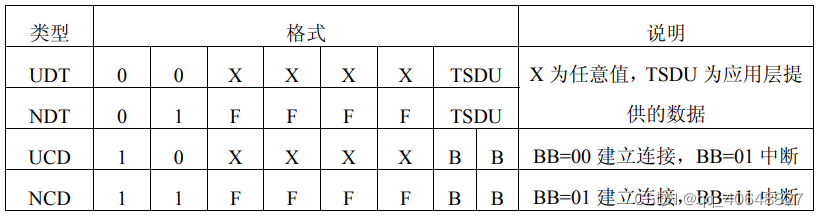
La capa de transporte proporciona cuatro datos de protocolo de transporte diferentes:
1) UDT, adecuado para transmisión sin conexión;
2) END, adecuado para transmisión orientada a conexión;
3) UCD, utilizado para establecer e interrumpir una transmisión punto a punto;
4) NCD, utilizado para la confirmación de tramas de datos orientadas a la conexión.
3.5 Capa de aplicación
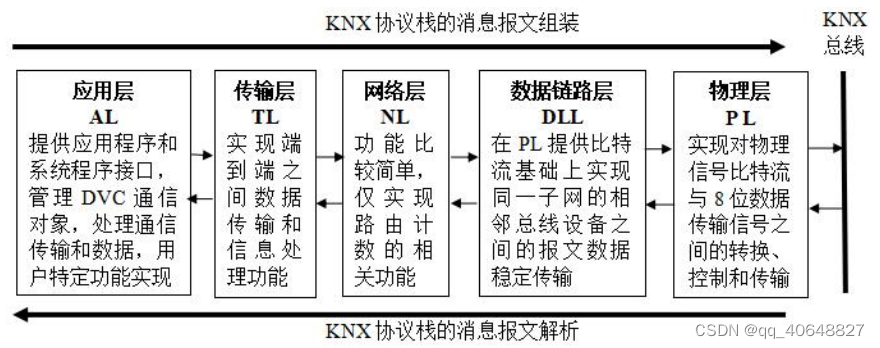
La capa de aplicación es la capa más alta del protocolo KNX y realiza principalmente dos funciones: la primera es proporcionar interfaces para aplicaciones y programas del sistema, y también define algunos servicios de la aplicación; la segunda función es gestionar los objetos de comunicación del dispositivo de bus y manejar su propia transmisión de comunicaciones y datos para completar las funciones específicas del usuario.
La unidad de señal más pequeña generada por AL se llama unidad de datos de protocolo AL (Unidad de servicio de capa de aplicación, APDU para abreviar). La longitud de la APDU es de 4 bits/10 bits. Su esencia es codificar y decodificar la TPDU (TSDU) y la APCI (información de control del protocolo de capa de aplicación) del TL. La estructura del mensaje entre la capa de aplicación AL y la capa de transporte TL es la siguiente :
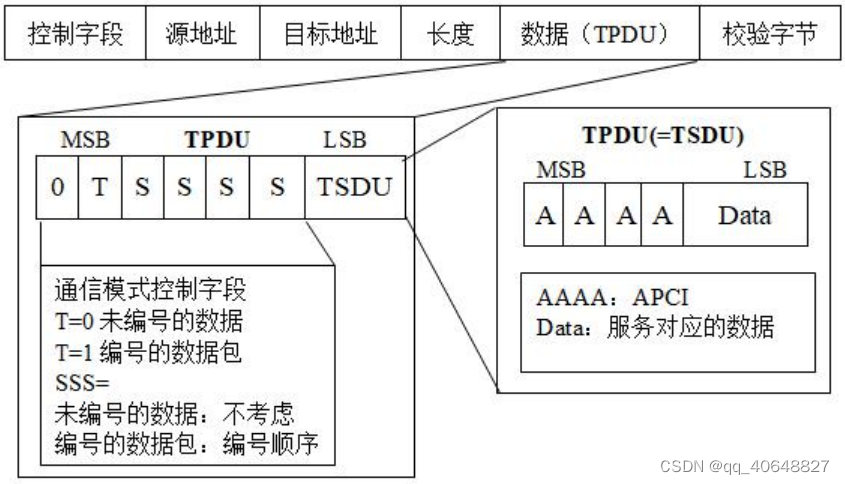
El formato detallado del mensaje es el siguiente:
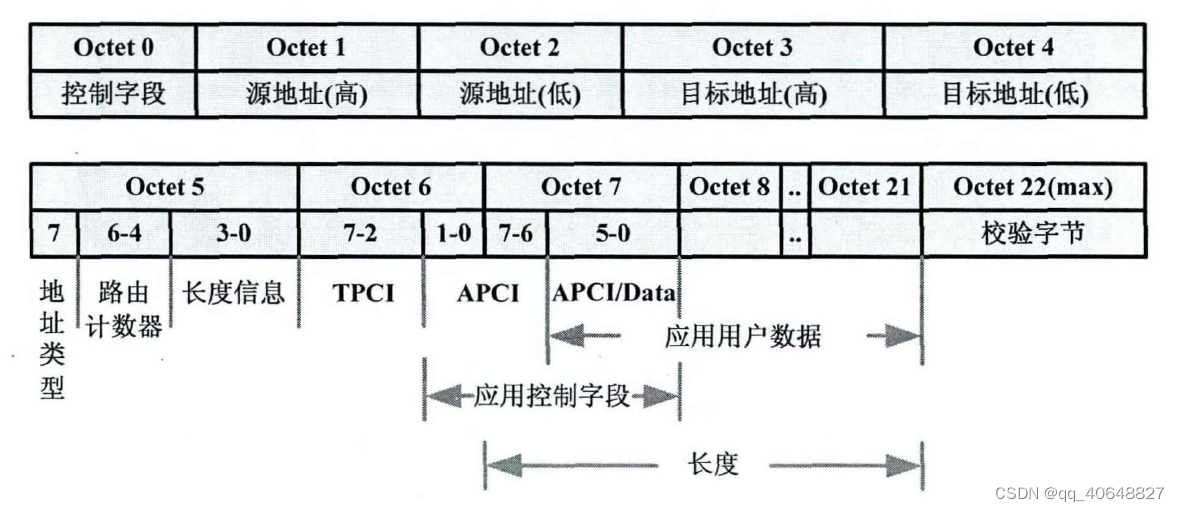
Partes que deben considerarse para cada capa de protocolo:
-
Capa de enlace de datos: campo de control (campo 0), dirección de origen (campos 1 y 2), dirección de destino (campos 3 y 4), tipo de dirección de destino (octavo bit del campo 5), estadísticas de longitud del paquete (campo 5 de 1-4 bits) y byte de verificación (campo 22)
-
Capa de red: recuento de rutas (bits 5-7 del campo 5)
-
Capa de transporte: determina el método de transmisión (TPCI, bits 3-8 del campo 6)
-
Capa de aplicación: información de control del protocolo de la capa de aplicación (APCI, bits 1-2 del campo 6 y bits 7-8 del campo 7, es posible que algunas aplicaciones también necesiten incluir los bits 1-6 del campo 7), datos de la capa de aplicación (campo 7 a Campo n, n<22)
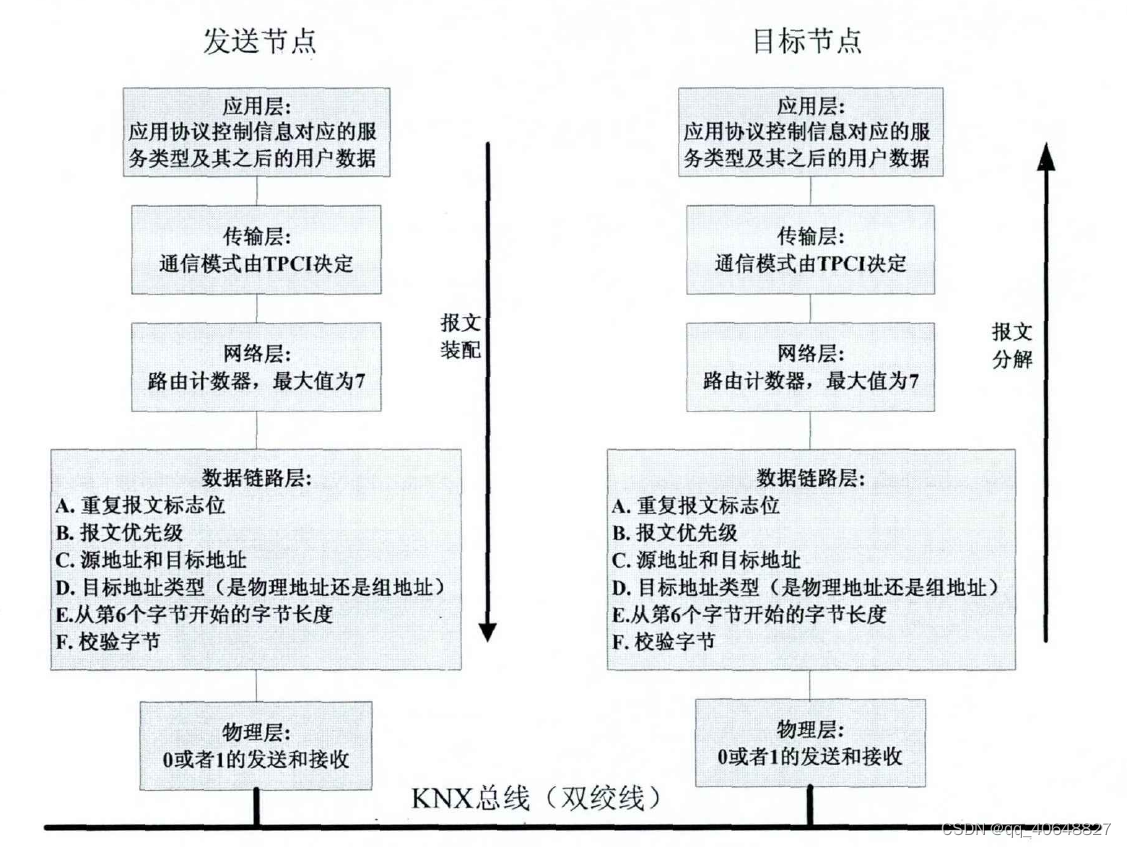
Proceso de montaje y desmontaje de mensajes KNX:
4. Método de comunicación KNX
4.1 Dirección física y dirección de grupo
Para implementar la comunicación del protocolo KNX, cada nodo del bus KNX tiene dos direcciones: una es la dirección física (PA) y la otra es la dirección de grupo (Group Address, GA).
La dirección física es la tarjeta de identificación de cada dispositivo del nodo de bus, corresponde a la ubicación topológica del dispositivo en el bus KNX y consta de dominio, línea y número de dispositivo. La dirección física se asigna durante la instalación y programación del dispositivo y se utiliza para descargar aplicaciones de dispositivos de bus, direcciones de grupo y trabajos de mantenimiento . La composición de la dirección física es la siguiente:

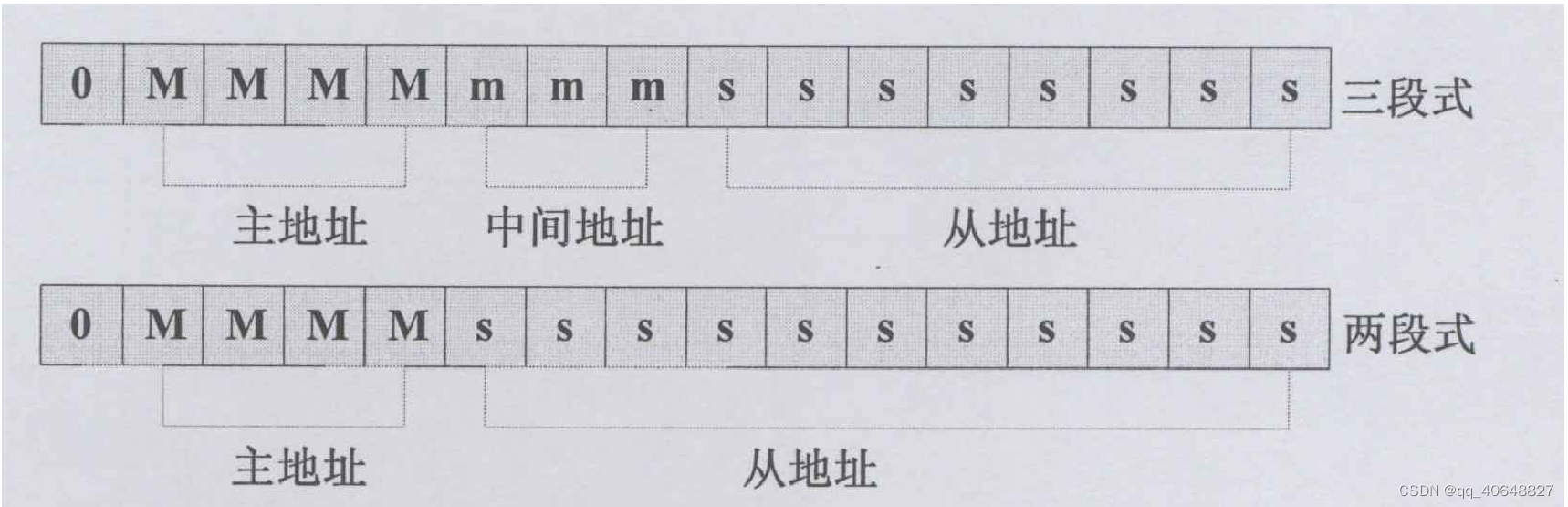
La dirección de grupo juega un papel extremadamente importante en el mecanismo de comunicación KNX. La comunicación mutua entre nodos KNX se logra principalmente a través de la dirección de grupo en lugar de la dirección física. La dirección de grupo simplifica el método de comunicación entre buses, lo que hace que sea extremadamente conveniente controlar uno para muchos, múltiples para uno y control de escena en la automatización de edificios. La dirección de grupo ocupa 2 bytes, el primer bit de los cuales es 0 y los 15 bits restantes son la dirección efectiva. La dirección del grupo se puede expresar en dos formatos decimales, a saber, el formato de dos segmentos y el formato de tres segmentos, como se muestra en la Figura 2-7. El formato de dos segmentos es M/s y el formato de tres segmentos es M /m/s Diferente La representación sólo significa que el nodo de bus KNX tiene un concepto funcional diferente en la red KNX y sus datos binarios no han cambiado de ningún modo. Por ejemplo, 3/515 y 3/23 representan la misma dirección de grupo y ambos son 0 0011 010 00000011 en binario.
Cabe señalar que la dirección de grupo del nodo es esencialmente diferente de la dirección física: la dirección física describe la estructura de la topología de la red del sistema KNX, mientras que la dirección de grupo se utiliza para representar la división lógica de funciones del bus KNX. dispositivo de nodo . Tome la expresión de tres párrafos como ejemplo: el primer párrafo se utiliza para representar las tres funciones de "aire acondicionado", "sombreado" y "atenuación" y el segundo párrafo puede representar equipos de aire acondicionado, persianas y luces en diferentes pisos. El tercer párrafo Representa dispositivos en diferentes habitaciones del mismo piso.
Si un dispositivo de bus KNX solo completa una función, solo debería necesitar una dirección de grupo, pero si va a implementar múltiples funciones, el dispositivo de bus puede necesitar varias direcciones de grupo diferentes.
4.2 Objetos de comunicación y tabla de objetos de comunicación
Los objetos de comunicación son los sujetos de comunicación en la comunicación de red KNX. Un dispositivo de nodo de bus KNX generalmente requiere que múltiples objetos de comunicación trabajen juntos para completar ciertas funciones. Por ejemplo, un dispositivo de nodo de salida de interruptor de ocho vías requiere al menos 8 objetos de comunicación de interruptor para completar la operación de salida de interruptor. Al mismo tiempo, cada interruptor La salida también puede tener comunicación de estado de conmutación.Objeto para reflejar el estado de salida actual de este canal.
Para gestionar mejor estos objetos de comunicación, se define una tabla de objetos de comunicación , que contiene información sobre todos los objetos de comunicación en el dispositivo de nodo y es creada por el usuario en EEPROM. La estructura y el significado de los datos internos de la tabla de objetos de comunicación se muestran en la siguiente figura. Como se puede ver en la figura, esta tabla almacena la cantidad de objetos de comunicación en el dispositivo de nodo (Recuento de objetos), el puntero de la tabla de indicadores de RAM (Puntero de tabla de indicadores de RAM) y la descripción de todos los objetos de comunicación (Descriptor de objetos). . La descripción del objeto de comunicación contiene tres bytes: (1) El byte del puntero de datos es un puntero que apunta a la dirección de una RAM o EERROM. Cuando el programa se está ejecutando, este espacio de direcciones se utiliza para almacenar temporalmente el valor del objeto de comunicación; ( 2) Byte de configuración Los bytes se utilizan para configurar objetos de comunicación y establecer los métodos de comunicación específicos de los objetos de comunicación; (3) Type Byte representa el tipo de datos del valor del objeto de comunicación.
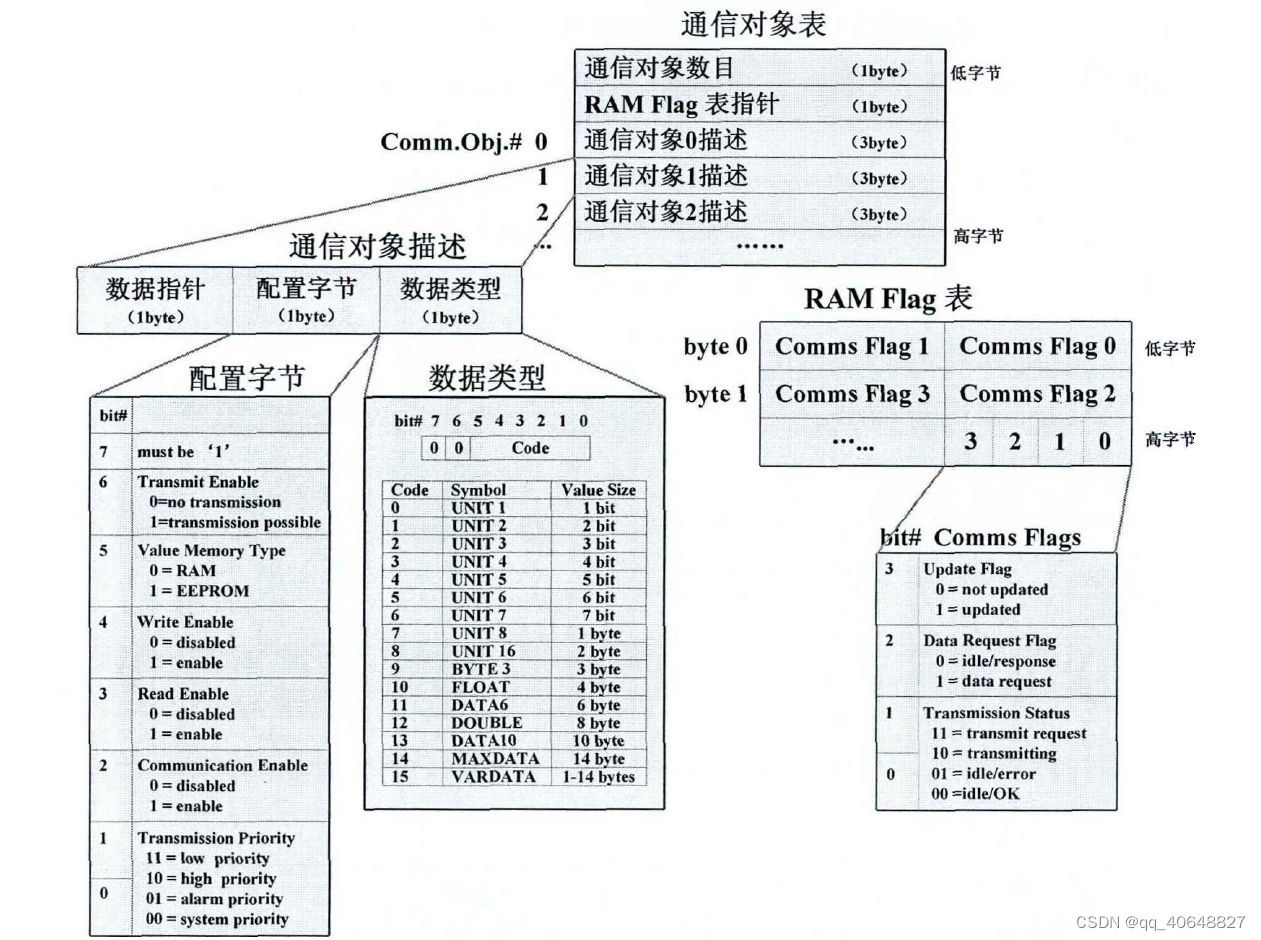
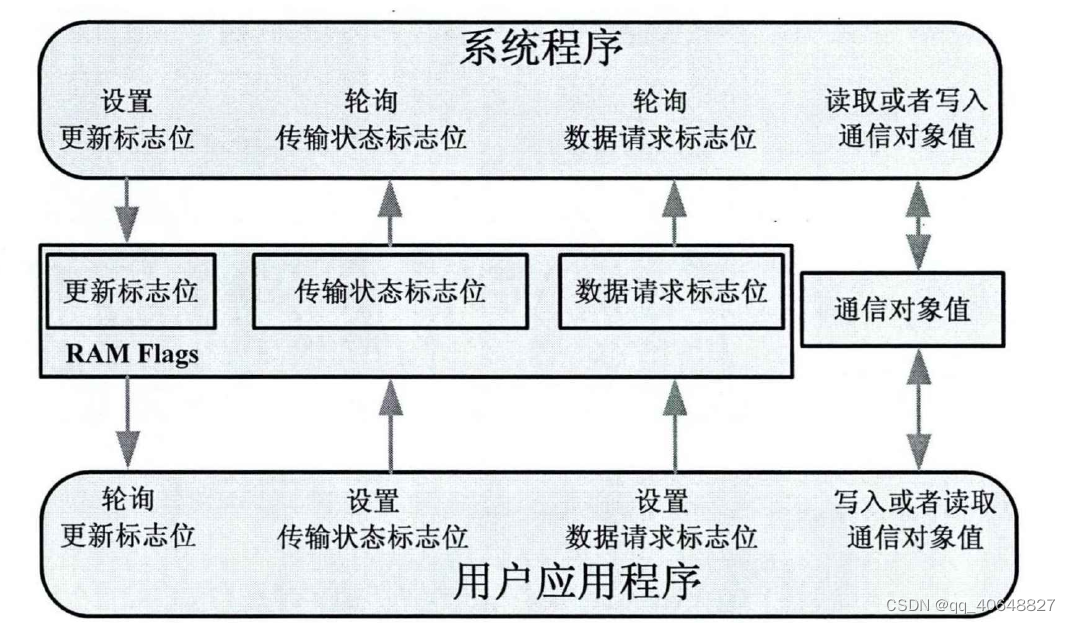
Durante el proceso de envío y recepción de mensajes de los nodos KNX, cada objeto de comunicación tiene algunos atributos de estado, que son variables temporales que se almacenan en la tabla de banderas RAM. La tabla de indicadores de RAM también se describe en detalle en la figura anterior. RAM Flag Table es un puente para la comunicación interna entre los programas del sistema y los programas del usuario . En la tabla de indicadores de RAM, cada objeto de comunicación utiliza 4 bits para describir el estado del indicador de comunicación, incluido un indicador de actualización de datos de recepción de 1 bit (Indicador de actualización), un indicador de solicitud de datos de envío de 1 bit (Indicador de solicitud de datos) y un indicador de solicitud de datos de envío de 1 bit (Indicador de solicitud de datos). Bandera de estado de comunicación de 2 bits (estado de transmisión). La siguiente figura muestra el papel de la tabla de indicadores de RAM en la interacción entre los programas del sistema y los programas del usuario.
-
Recibir indicador de actualización de datos: se utiliza para indicarle al usuario que reciba datos.
-
Bandera de solicitud de envío de datos: se utiliza para solicitar a los nodos relevantes que le envíen datos.
-
Indicador de estado de comunicación: se utiliza para indicar al usuario que envíe datos.
En la figura anterior, el programa del sistema actualiza el valor del objeto de comunicación en la tabla de objetos de comunicación y el valor del objeto de comunicación se transmite desde el nodo emisor a todos los nodos de destino con la misma dirección de grupo a través de mensajes. Se actualizan los valores del objeto de comunicación correspondiente en todos los nodos de bus que reciben este mensaje. En el sistema KNX, un objeto de comunicación puede recibir información a través de múltiples direcciones de grupo, pero solo puede enviar información a través de una única dirección de grupo. Múltiples objetos de comunicación en un dispositivo de nodo pueden conectarse a la misma dirección de grupo . Se puede observar que la actualización o lectura del objeto de comunicación está estrechamente relacionada con la dirección del grupo, por lo que el programa del sistema debe encontrar la correspondencia entre el objeto de comunicación y la dirección del grupo, por lo que el protocolo KNX introduce otras dos tablas, una es la Tabla de asociación, y la otra es la tabla de asociación, es la tabla de direcciones (tabla de direcciones).
4.3 Tabla de direcciones y tabla de asociaciones
La tabla de direcciones contiene información sobre todas las direcciones físicas y direcciones de grupo en el dispositivo de nodo y su estructura es la que se muestra en la figura. El primer byte representa la dirección física y la suma de los números de todas las direcciones de grupo. El segundo y tercer bytes representan la dirección física del dispositivo de nodo, seguido de la información de la dirección de cada grupo. Cada dirección tiene un número de conexión (n.º de conexión), que comienza en 0, y el número de secuencia de conexión de la primera dirección de grupo es la conexión n.º 1.
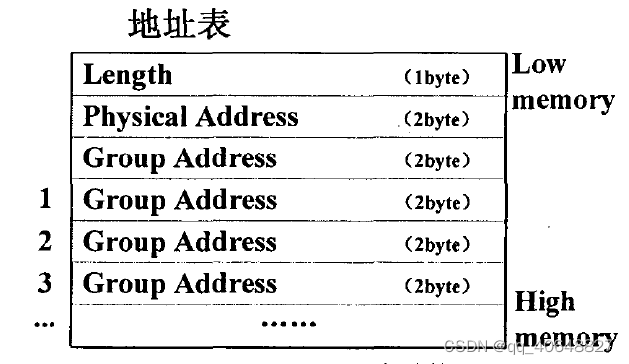
Cuando el programa del sistema recibe un mensaje, compara la dirección del grupo en el mensaje con la dirección del grupo en la tabla de direcciones en secuencia. Si se encuentra la misma dirección de grupo o no se encuentra la misma dirección de grupo al final de la tabla de direcciones, la comparación se detiene. .
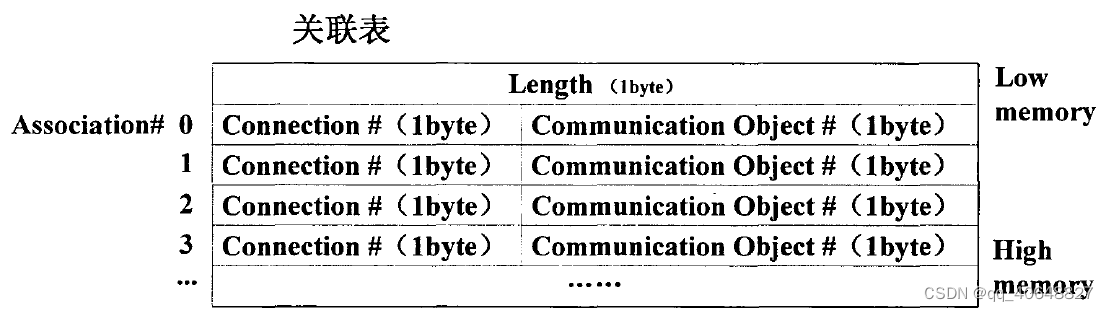
La tabla de asociación describe la relación de conexión entre la dirección del grupo y el objeto de comunicación, y su estructura se muestra en la figura. El primer byte representa la longitud de la tabla de conexiones, seguido del contenido de la tabla de conexiones. Cada conexión contiene dos partes:
4.4 Relación entre tabla de direcciones, tabla de asociaciones y tabla de objetos de comunicación
El mecanismo de comunicación del bus KNX se compone de objetos de comunicación y tablas de objetos de comunicación relacionados, tablas de direcciones y tablas de asociación. Tanto la tabla de direcciones como la tabla de objetos de comunicación son tablas lineales de longitud variable. El número de conexión (N.° de conexión) en la tabla de direcciones aumenta desde 0. La conexión n.° 0 representa la dirección física del dispositivo de nodo. La dirección del primer grupo corresponde a la conexión n.° 1; el número de objeto de comunicación (N.° de objeto de comunicación) en el objeto de comunicación la tabla comienza desde 1. Comience a incrementar, el objeto de comunicación n.° 0 representa el puntero de la tabla de indicadores de RAM. En la tabla de asociación, un número de objeto de comunicación y un número de conexión forman una asociación, lo que significa que la actualización y lectura del valor del objeto de comunicación se completan a través de este grupo de direcciones. La siguiente figura muestra en detalle cómo se relacionan la tabla de objetos de comunicación, la tabla de direcciones y la tabla de asociaciones.

Las flechas entre las tablas indican si el objeto de comunicación se envía o recibe. Existen las siguientes relaciones en la figura anterior:
-
Un objeto de comunicación de envío solo puede utilizar una dirección de grupo, como los objetos de comunicación Objeto0, Objeto1
-
Un objeto de comunicación receptor solo puede conectarse a una dirección de grupo, como por ejemplo el objeto de comunicación Objeto2
-
Un objeto de comunicación receptor se puede conectar a varias direcciones de grupo, como el objeto de comunicación Objeto3
-
Una dirección de grupo puede conectar múltiples objetos de comunicación, como la dirección de grupo '113'
Por ejemplo
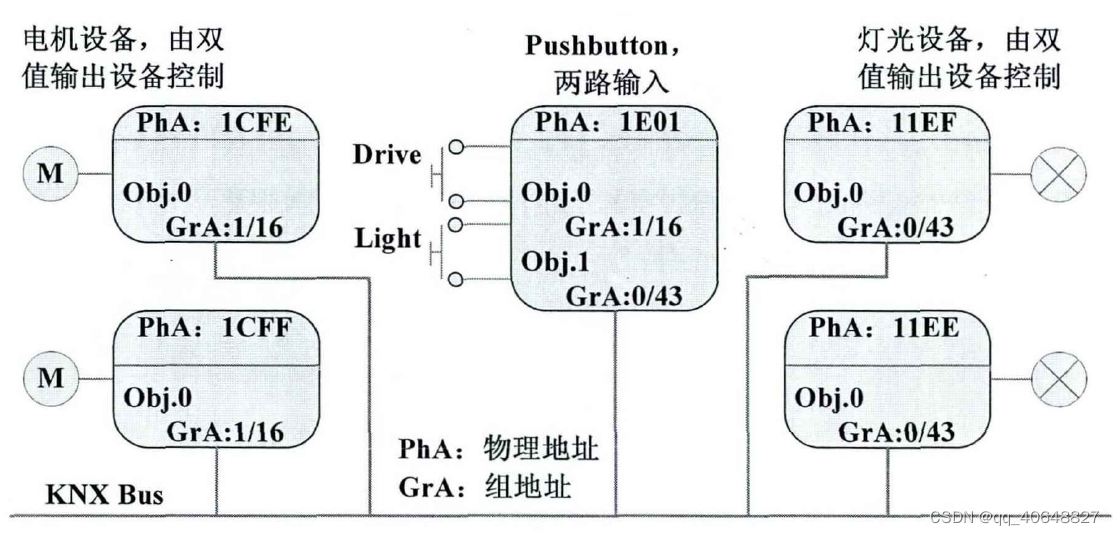
En la figura anterior, el dispositivo de bus 1E01 es un nodo sensor, que incluye dos botones, los objetos de comunicación correspondientes 0 y 1, la dirección de grupo de Obj.0 es 1/16 y la dirección de grupo de Obj.1 es 0/43. Los dispositivos restantes son nodos de accionamiento y la dirección física, el objeto de comunicación y el diagrama de direcciones de grupo se han especificado en detalle. Se puede ver que el objeto de comunicación Obj.0 en el dispositivo 1E01, el objeto de comunicación Obj.0 en el dispositivo 1CFE y el objeto de comunicación Obj.0 en el dispositivo 1CF℉ están todos conectados a la misma dirección de grupo 1/16, lo que significa : si 1E01 envía un mensaje a través de 1/16, entonces los dispositivos 1C℉E y 1CFF actualizarán el valor del objeto de comunicación Obj.0 para controlar la parada o arranque del motor. De la misma manera, el objeto de comunicación Obj.1 en el dispositivo 1E01, el objeto de comunicación Obj.0 en el dispositivo 11EF y el objeto de comunicación Obj.0 en el dispositivo 11EE están todos conectados a la misma dirección de grupo 0/43, lo que muestra que : si 1E01 pasa 0/43 envía un mensaje, entonces los dispositivos 11EF y 11EE actualizarán el valor del objeto de comunicación Obj.0 para controlar el encendido o apagado de la luz.