
ARHUD (Augmented Reality Head Up Display), die Kombination aus Augmented Reality und Head-up Display, ist eine Technologie, die Rendering-Elemente in die reale Welt projiziert. Es ist derzeit die kostengünstigste Anzeigemethode, die Benutzer verstehen können.
Die erste Anwendung der HUD-Funktion fand im Zweiten Weltkrieg statt, wo sie auf Schusswaffen und Kampfflugzeuge angewendet wurde. In den frühen 1980er Jahren begann sie für zivile Zwecke eingesetzt zu werden. In den frühen 1990er Jahren wurde das technische Konzept offiziell vorgeschlagen und weiterentwickelt in eine Funktion auf Automobilen übertragen. Tatsächlich gibt es in Autos viele militärische und zivile Konfigurationen, beispielsweise Trägheitsnavigationsgeräte.
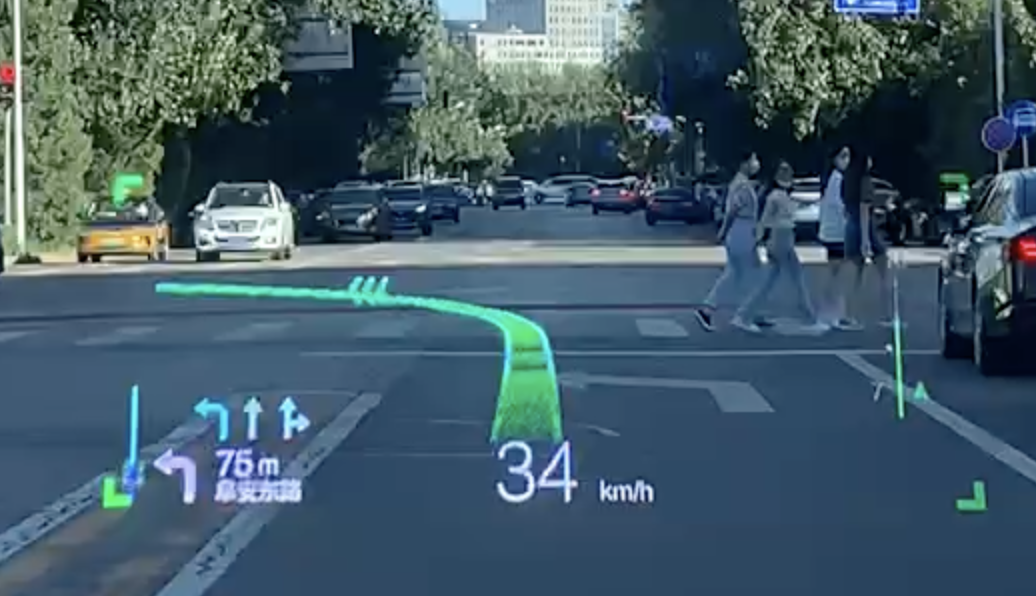
Die ARHUD-Fahrnavigation projiziert wichtige Navigationsinformationen wie Geschwindigkeitsbegrenzungen, Lenkbewegungen und Führungslinien direkt vor das Sichtfeld des Fahrers, sodass der Fahrer die Fahrführungsinformationen anzeigen kann, ohne den Kopf zu senken oder zu drehen.
AutoNavi hat viel Forschungs- und Entwicklungsarbeit in der ARHUD-Fahrnavigation geleistet und verfügt über branchenführende technische Reserven und praktische Erfahrung. Im August 2022 arbeitete AutoNavi Maps mit BAIC und Huawei zusammen, um die ARHUD-Navigation von BAIC Rubik's Cube auf den Markt zu bringen.
1.Virtueller Bildabstand
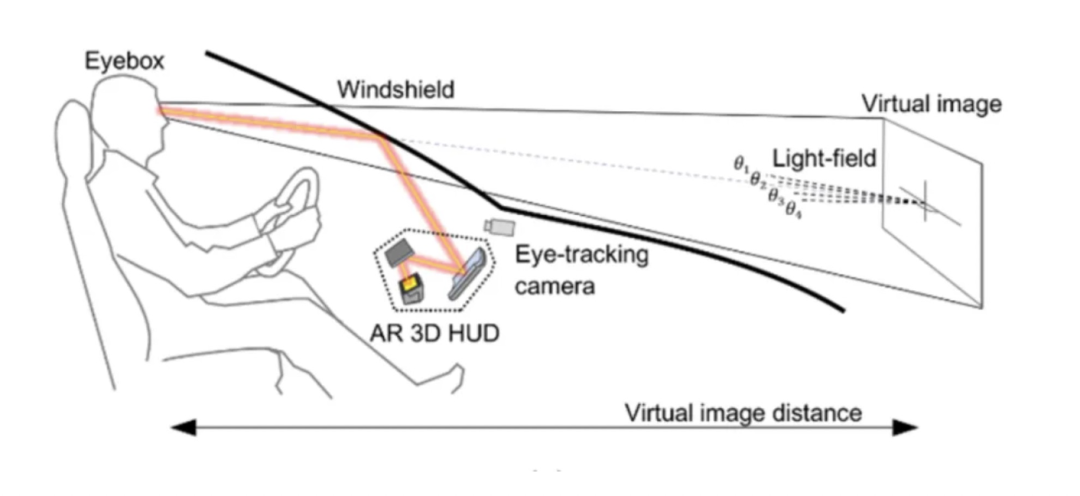
Der virtuelle Bildabstand, kurz VID genannt, ist einfach ausgedrückt der visuelle Abstand vom virtuellen Bild zum menschlichen Auge. Jeder weiß, dass auch das menschliche Auge Brennweiten hat. Die Brennweiten für das Sehen in die Ferne und in die Nähe sind unterschiedlich, wenn also die Entfernung von VID ist nicht weit genug entfernt. Bei weitem Blick wird die ARHUD-Anzeige aufgrund der Fokussierung der Augen unscharf.
Der VID-Abstand eines herkömmlichen HUD beträgt etwa 2,5 Meter, während der VID-Abstand eines AR-HUD oft mehr als 10 Meter beträgt. Um eine spurübergreifende Anzeige zu erreichen, muss der Projektionsabstand 20 Meter betragen.
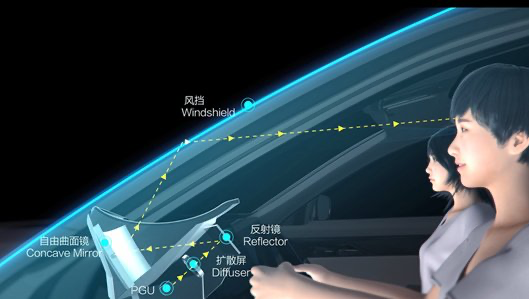
Das traditionelle W-HUD kann eigentlich als Projektor verstanden werden, der das Bild reflektiert und auf die Windschutzscheibe projiziert (wie die HUD-Projektionsfunktion des Amap auf dem Mobiltelefon), was tatsächlich der ursprünglichen Projektion der Informationen entspricht wird auf dem Armaturenbrett auf der Windschutzscheibe angezeigt. Auf der Windschutzscheibe. Tatsächlich ist dies auch die ursprüngliche Absicht des HUD-Designs – der Fahrer muss seinen Kopf nicht senken, um relevante Informationen über die Fahrweise des Fahrzeugs zu erhalten.
Allerdings ist die Bildgröße von W-HUD begrenzt (normalerweise beträgt der Projektionsabstand 3 m, die Anzeigegröße beträgt 15 bis 20 Zoll), die anzeigbaren Informationen sind geringer und das Bild verschmilzt nicht mit der Straße. Der Fahrer muss seinen Blick immer noch von der Straße abwenden und erneut Informationen können nur durch Fokussierung erhalten werden, was tatsächlich gegen die ursprüngliche Designabsicht des HUD verstößt.
2.Sichtfeld
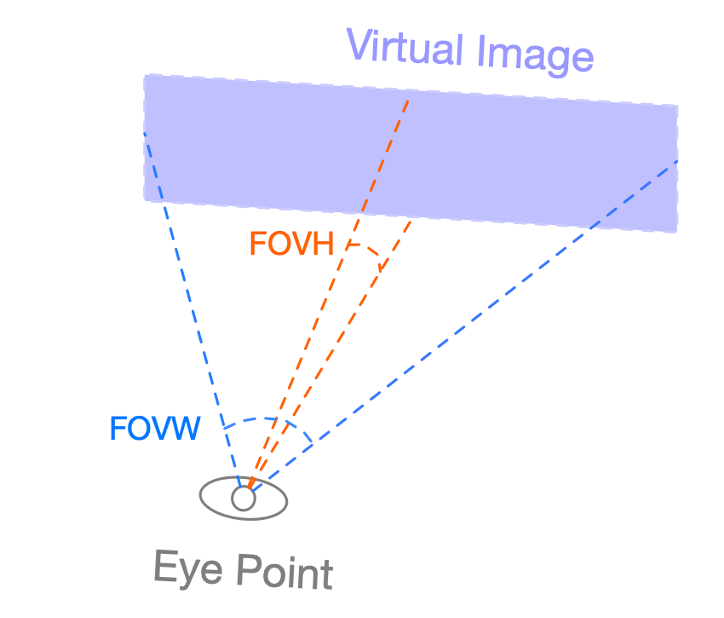
Das Sichtfeld, auch FOV genannt, umfasst das horizontale und das vertikale Sichtfeld, zentriert auf die Augen des Fahrers. Das Sichtfeld des herkömmlichen HUD ist sehr klein, im Allgemeinen nur 5 Grad. Das horizontale Sichtfeld von AR HUD muss über 10° liegen. Das ARHUD von Ideal ONE kann 20° erreichen, und das ARHUD von Wenjie M5 kann auch 13° erreichen.
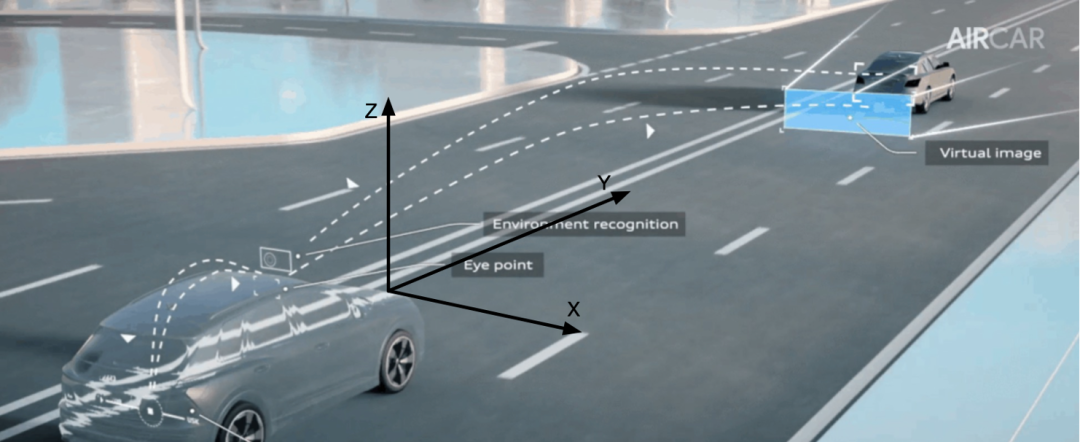
3. Augenpunkt (Augenpunkt)
Koordinaten des menschlichen Auges (x, y, z), relativ zur Position des Fahrzeugkarosserie-Koordinatensystems, mit der Mitte der Fahrzeugfront als Koordinatenursprung, in Metern.
Die Koordinaten des menschlichen Auges passen sich dynamisch an die Körpergröße, Sitzhaltung und Kopfposition des Fahrers an.
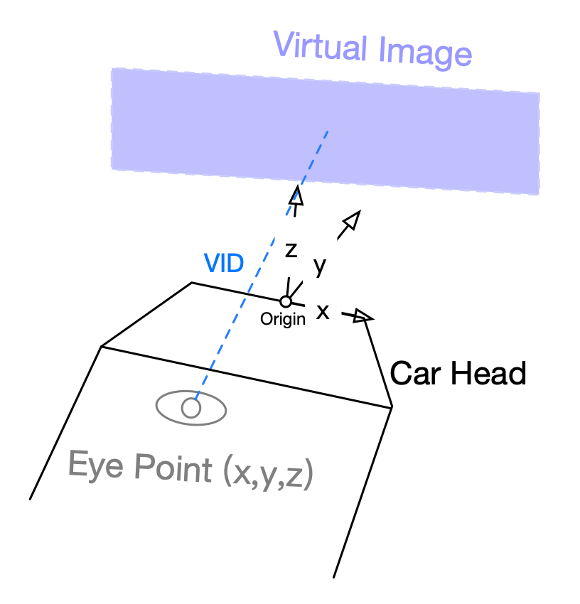
4. Drehwinkel des virtuellen Bildes (drei Freiheitsgrade)
4.1. Rotationswinkel entlang der X-Achse (LDA, Ansicht von unten)

4.2. Rotationswinkel entlang der Y-Achse (Rollwinkel)
4.3. Rotationswinkel entlang der Z-Achse (Orientierungswinkel)

5. Konvertierung virtueller Bildkoordinaten (Weltkoordinaten in virtuelle Bildkoordinaten)
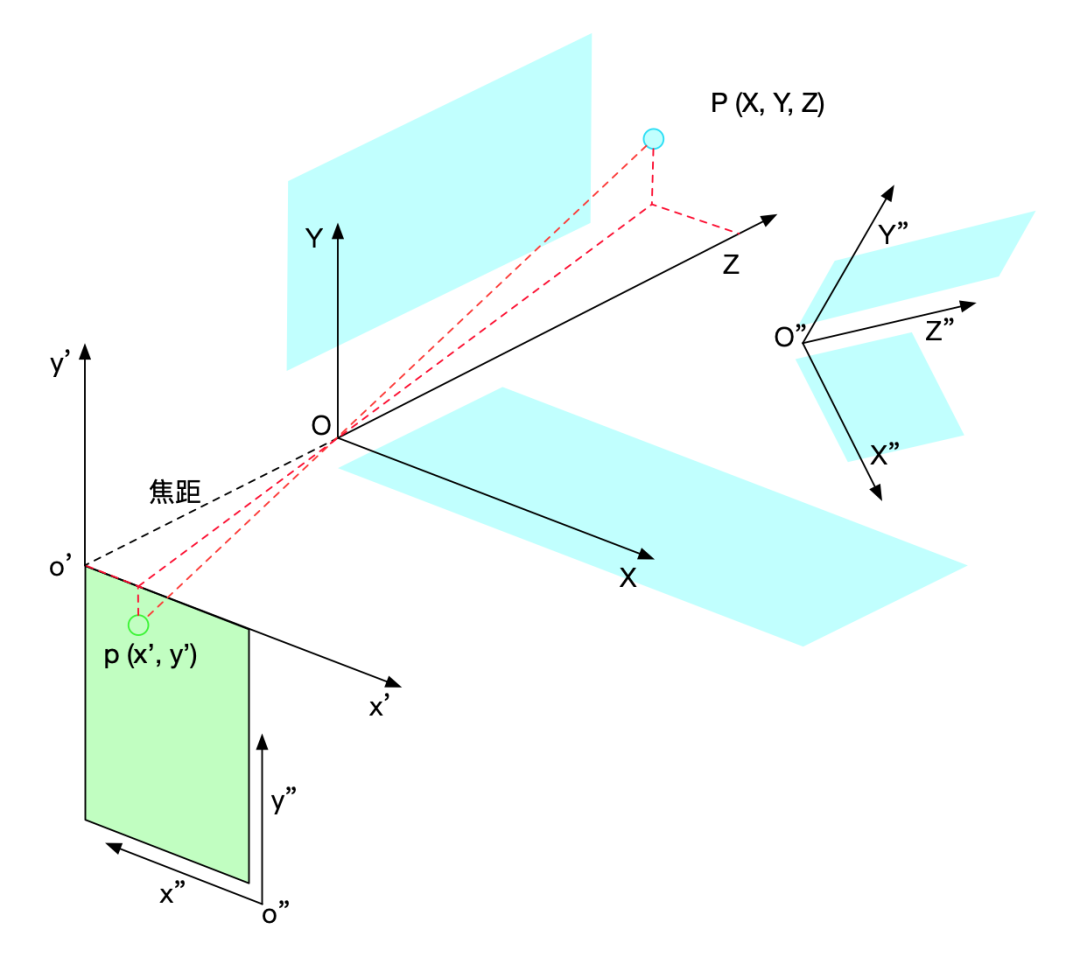
Schauen wir uns zunächst an, wie Weltkoordinaten in der Kameraprojektion in Pixelkoordinaten umgewandelt werden.
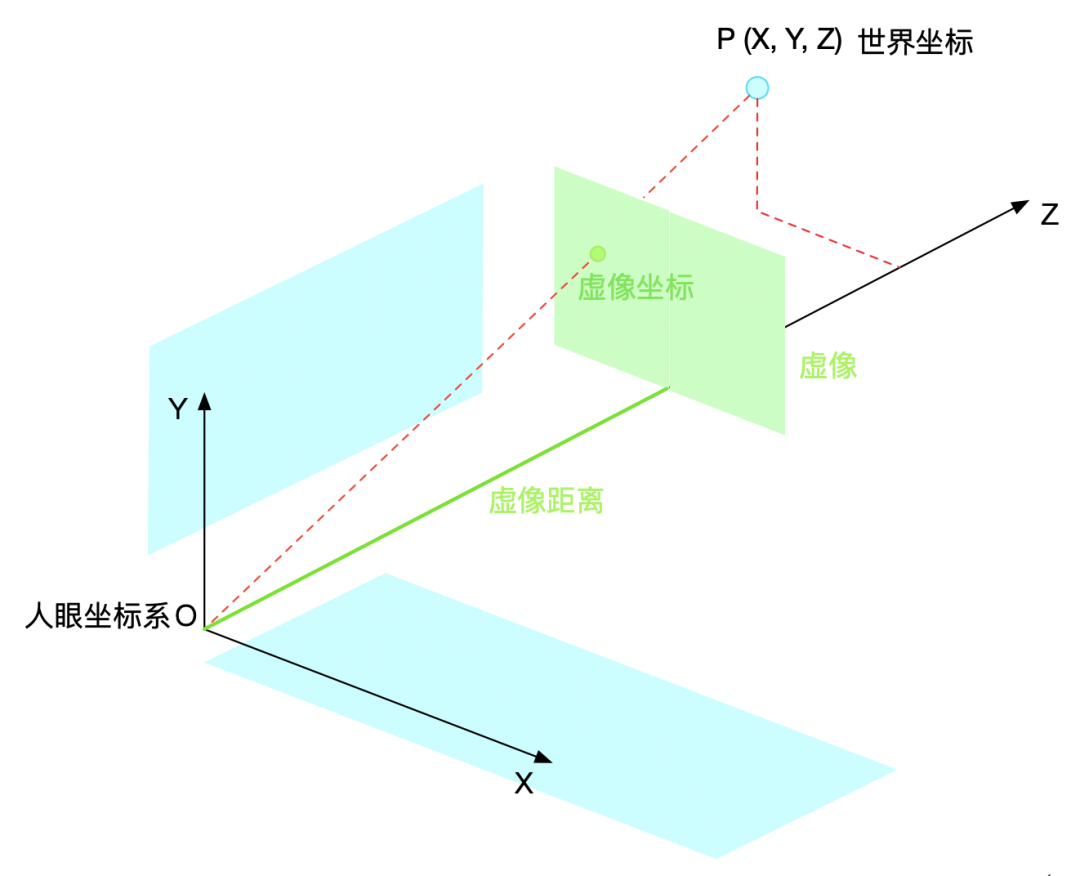
Schauen Sie sich dann an, wie Weltkoordinaten in der HUD-Projektion in virtuelle Bildkoordinaten (die Einheit ist ebenfalls Pixel) umgewandelt werden.
Unter der Voraussetzung, dass die virtuelle Bildentfernung, der Sichtfeldwinkel, die Position des menschlichen Auges und der virtuelle Bildwinkel bekannt sind, können Weltkoordinaten und virtuelle Bildkoordinaten ineinander umgewandelt werden.
Durch den Vergleich der Kameraprojektion und der HUD-Projektion können wir feststellen, dass die Brennweite bei der Kameraprojektion eng mit der virtuellen Bildentfernung bei der HUD-Projektion zusammenhängt.
Auch menschliche Augen haben Brennweiten, und die Brennweiten für das Sehen in die Ferne und in die Nähe sind unterschiedlich. Wenn das virtuelle Bild also nicht weit genug entfernt ist, wird die Darstellung von ARHUD aufgrund der Brennweite der Augen beim Blick in die Ferne unscharf .
Daher hängt die virtuelle Bildentfernung von der Brennweite des menschlichen Auges ab.
Wenn der virtuelle Bildabstand zu gering ist, muss der Fahrer seinen Blick von der Straße abwenden und sich neu konzentrieren, um die Informationen auf dem HUD klar zu sehen, was tatsächlich gegen die ursprüngliche Designabsicht des HUD verstößt.
6.Anwendung der Koordinatentransformation
6.1. Überprüfen Sie, ob die virtuelle Bildprojektion korrekt ist
Probleme : Der Hauptzweck der virtuellen Bildprojektion besteht darin, reale Koordinaten in das virtuelle Bild zu projizieren. Wenn keine genaue Übereinstimmung erreicht werden kann, wird die Genauigkeit von ARHUD beeinträchtigt.
Lösung : Das Hardwaresystem gibt die Projektionsparameter ein – virtuelle Bildentfernung, Sichtfeldwinkel, Position des menschlichen Auges, virtuelle Bildauflösung, virtueller Bildwinkel – und berechnet die Projektionsmatrix, durch die die virtuellen Bildkoordinaten und die Fahrzeugweltkoordinaten ermittelt werden können umgewandelt. .
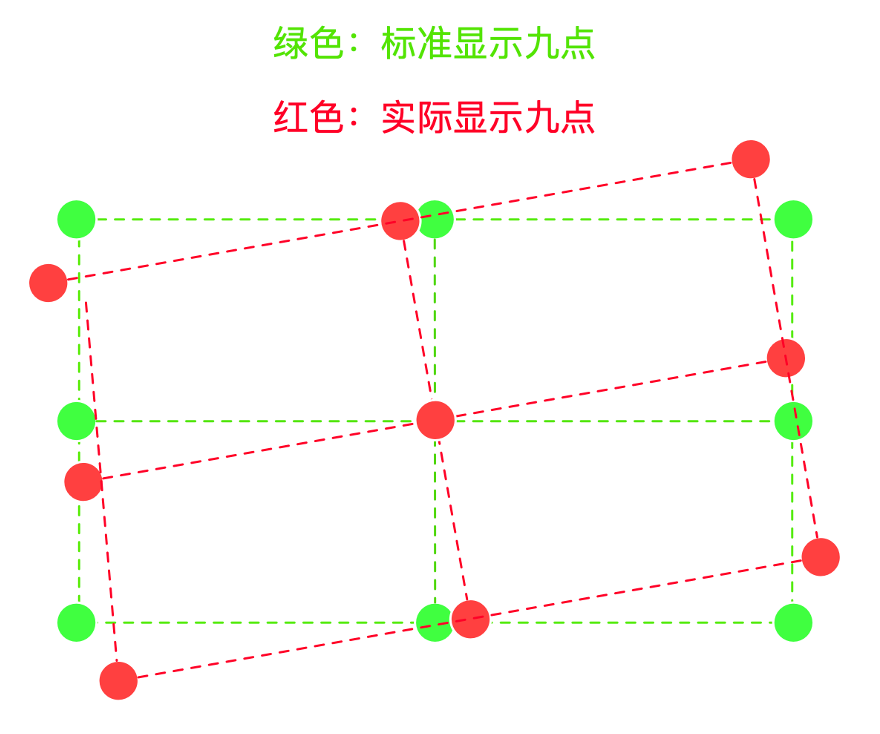
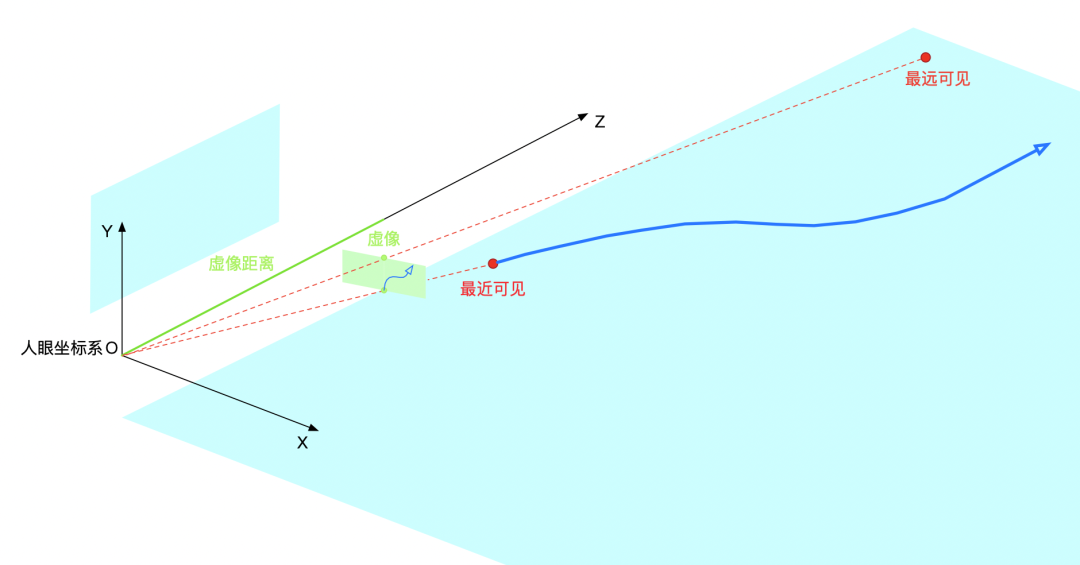
Indem mehrere repräsentative Pixelkoordinaten (normalerweise neun Punkte) auf dem virtuellen Bild genommen und in die Weltkoordinaten der Fahrzeugkarosserie umgewandelt werden, kann der sichtbare Bereich des virtuellen Bildes berechnet werden – der am weitesten sichtbare, der am nächsten sichtbare, der am weitesten links sichtbare, und ganz rechts sichtbar. , die Mitte ist sichtbar.
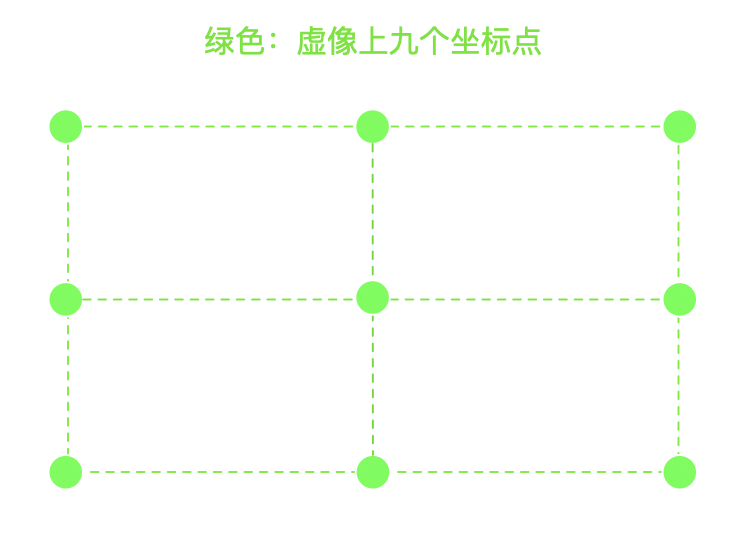
Platzieren Sie das Markierungsobjekt (vor dem Auto) im berechneten Sichtbereich und prüfen Sie, ob die Position des Markierungsobjekts im virtuellen Bild mit den neun Punkten übereinstimmt. Wenn sie übereinstimmen, bedeutet dies, dass die Projektion korrekt ist. Wenn dies der Fall ist Nicht übereinstimmen, der Projektionsfehler ist groß, was erforderlich ist. Benachrichtigen Sie das Hardwaresystem, um Anpassungen vorzunehmen.
6.2. Lösen Sie das Problem, dass die Spurwechsel-Hilfslinie den virtuellen Bildanzeigebereich überschreitet
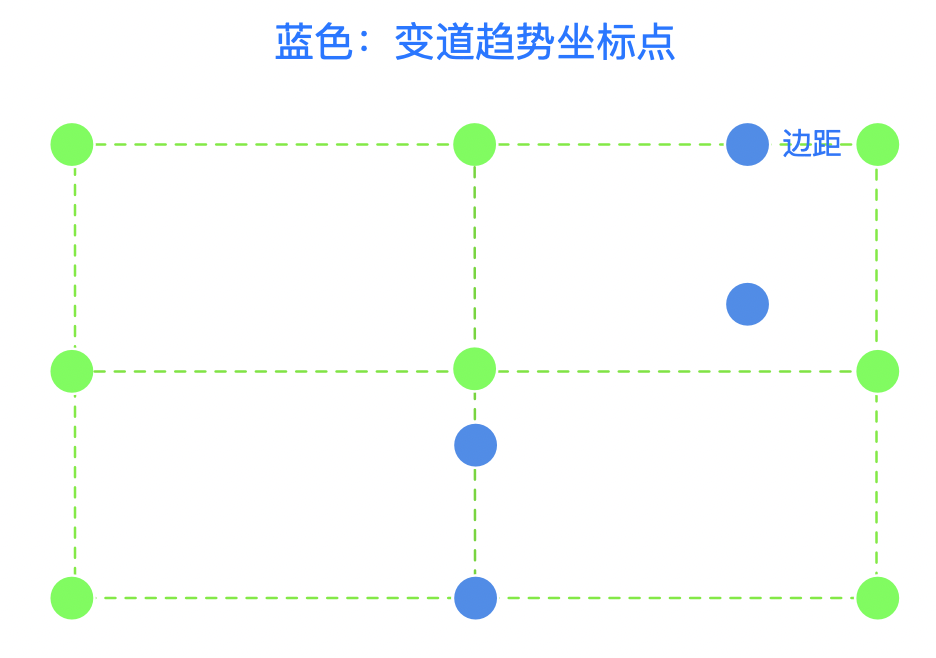
Probleme : Die Spurwechsel-Hilfslinien in der AR-Navigation entsprechen der realen Welt und zeigen auf angrenzende Fahrspuren. Wenn der Sichtbereich des virtuellen Bildes die angrenzenden Fahrspuren nicht abdecken kann, werden die Spurwechsellinien den Anzeigebereich überschreiten.
Lösung : Nehmen Sie basierend auf den Spurwechselinformationen (Spurwechsel nach links, Spurwechsel nach rechts, Wechsel auf mehrere Spuren) mehrere Trendpixelkoordinaten auf dem virtuellen Bild, konvertieren Sie sie in Fahrzeugkörperweltkoordinaten und projizieren Sie sie schließlich. Da die Koordinaten auf dem virtuellen Bild erfasst werden, überschreiten sie niemals den Anzeigebereich des virtuellen Bildes.
7.ARHUD-Hardwaretechnologie
7.1. TFT
Das ist ein TFT-LCD. Sein Prinzip besteht darin, dass das von der LED emittierte Licht durch die Flüssigkristalleinheit geht und die Informationen auf den Bildschirm projiziert.
Vorteile : Diese Lösung ist die früheste in der Branche entwickelte Projektionslösung. Sie ist ausgereift und relativ kostengünstig. (Derzeit können ausländische Lieferanten dies für etwa 2.500 bis 3.000 tun, und lokale Lieferanten können es für etwa 2.000 tun. Mit der Reife der Technologie und der Entwicklung damit verbundener Industrieketten sollten die Kosten weiter bei 2.000 liegen.)
Nachteile : Das Problem des Sonnenlichtrückflusses ist schwer zu lösen. Die Helligkeit reicht nicht aus und der Anzeigeeffekt ist tagsüber schlecht.

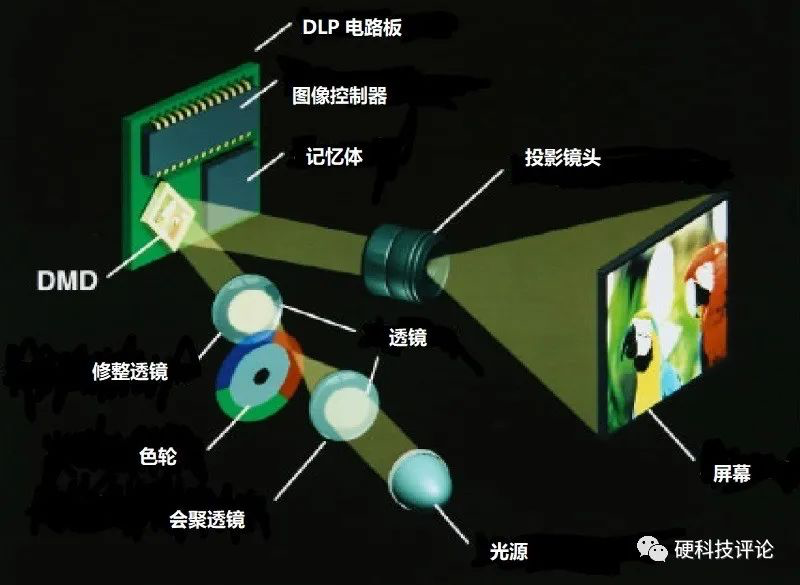
7.2. DLP
Dies ist die Abkürzung für Digital Light Processing. Es nutzt den DMD-Chip von TI, um das Bildsignal digital zu verarbeiten und dann zu projizieren.
Vorteile : Der DMD-Chip kann sicherstellen, dass die projizierten bewegten Bilder farbenfroh, zart, realistisch, natürlich und echt sind. Dank der digitalen Bearbeitung können Bildfehler beseitigt werden. DMD-Chips sind kleiner und leichter zu transportieren.
Nachteile : Die Kosten sind höher (die Kosten betragen mehr als 5.000 Yuan).
DLP kann einen Regenbogeneffekt verursachen, bei dem die Farbmischung und Konvertierung von Bildsignalen während der digitalen Verarbeitung abnormal ist.
Da DLP-Displays die DMD-Chips von TI verwenden müssen und Technologiepatente beinhalten, werden sie nur in zwei Modellen verwendet: Mercedes-Benz und Trumpchi.

7.3. LCOS
Das ist die Abkürzung für Liquid Crystal on Silicon, also Flüssigkristall mit Silizium, auch Flüssigkristall auf Siliziumbasis genannt. Dabei handelt es sich um ein Matrix-Flüssigkristallanzeigegerät mit relativ kleiner Größe, das auf einem Reflexionsmodus basiert. Diese Matrix wird mittels CMOS-Technologie auf einem Siliziumchip verarbeitet. Derzeit übernehmen Huawei und Yishu Technology diese Lösung hauptsächlich in China.
Vorteile : Im Gesamtreflexionsmodus ist die Lichtausnutzungseffizienz hoch und das Bild natürlicher. Der Preis ist kontrollierbar und die CMOS-Technologie wird von mehreren Herstellern beherrscht, wodurch die Situation vermieden wird, dass DMD-Chips ausschließlich von Texas Instruments monopolisiert werden. Zwischen der reflektierenden Schicht und der Siliziumsubstratschaltung befindet sich eine lichtabschirmende Metallschicht, die das Zurückströmen von Sonnenlicht wirksam verhindern kann.
Nachteile : Derzeit ist die Gesamttechnologie noch nicht sehr ausgereift, es gibt keine Massenproduktion in großem Maßstab und es besteht weiterer Entwicklungsbedarf. Der sichtbare Bereich des HUD ist klein und die Größe des Projektors ist relativ groß.
8. Wichtigste technische Schwierigkeiten von ARHUD
Der Markt ist klein
Das Sichtfeld der derzeit auf dem Markt erhältlichen ARHUD-Geräte ist zu klein und das Bild kann nur in einem kleinen Teil der Sichtlinie des Fahrers angezeigt werden.
Projektionshelligkeit
Die Helligkeit von HUD-Bildern erfordert eine höhere Helligkeit, um mit unterschiedlichem Außenlicht, Klima und anderen Einflüssen zurechtzukommen, um eine bessere Bildqualität und visuelle Effekte zu erzielen.
Hardwaregröße
Um das Gesamtvolumen des HUD-Systems zu reduzieren, werden die Einschränkungen der vorhandenen TFT/DLP-Module und die hohe Nachfrage nach FOV das HUD-System immer größer machen, was zu Konflikten mit der Raumaufteilung der Karosserie führt.
Echte Szenetauglichkeit
Es muss in Echtzeit durch verschiedene Straßennetzdaten, Sensordaten, GPS-Signale usw. korrigiert werden. Stellen Sie sicher, dass die AR-Grafik den realen Straßenbedingungen entspricht.
Position des menschlichen Auges
Wie man die Position des menschlichen Auges dynamisch überwacht und das von ARHUD projizierte Bild anpasst, um Probleme wie Unschärfe und Fehlausrichtung des Bildes zu vermeiden, wird die Fähigkeiten der HUD-Hersteller auf die Probe stellen.
Abschluss
Seit der Entwicklung der ARHUD-Technologie ist sie zu einem Schlachtfeld in der Fahrnavigationsbranche geworden. Es ist zu erwarten, dass sich Apples ARHUD in Zukunft schrittweise der Fahrnavigation annähern wird. Natürlich müssen noch viele technische Schwierigkeiten überwunden werden, um das Benutzererlebnis zu verbessern und im Sichtfeld der Navigation wirklich zu erkennen, dass „was Sie sehen, ist, was Sie bekommen“. Erfreulich ist, dass wir während der rasanten Entwicklung der ARHUD-Technologie die Bemühungen vieler inländischer Unternehmen gesehen haben. Ich hoffe, dass in Zukunft weitere chinesische Technologien im ARHUD-Bereich glänzen werden!
Hinweis: Das Verteilungsdiagramm in diesem Artikel stammt aus dem Internet. Bei Verstößen kontaktieren Sie uns bitte, um es zu löschen.
Folgen Sie „Amap Technology“, um mehr zu erfahren