La mayor parte de la contaminación provocada por el hombre (especialmente la contaminación plástica) que ingresa al océano es transportada por los ríos. De hecho, a medida que las redes fluviales atraviesan asentamientos urbanos, los desechos a menudo se introducen en el entorno ribereño, donde son transportados a los estuarios y, finalmente, al océano, con impactos dramáticos en la flora y la fauna acuáticas. Dado que reducir el impacto de la contaminación antropogénica en el medio acuático es fundamental, se han implementado varias estrategias para reducir el uso de objetos plásticos (y no biodegradables), promover el reciclaje, detectar basura en el medio ambiente y capturarla.
Centrándose en la detección de basura en entornos acuáticos (por ejemplo, océanos, ríos, playas), se han desarrollado muchos métodos para lograrlo en los últimos años gracias a los esfuerzos de la comunidad de teledetección. La búsqueda de basura se ha estudiado a diferentes escalas espaciales, dependiendo del equipo disponible (por ejemplo, vehículos aéreos no tripulados (UAV), imágenes de satélite). Una descripción general rápida de los sensores disponibles actualmente en drones incluye, por ejemplo, RGB, cámaras térmicas y multiespectrales, lidar (detección y alcance de luz) y sensores hiperespectrales.
Aunque hay tantos sensores que se pueden montar en un dron, las opciones disponibles son bastante limitadas dado el entorno fluvial de las zonas urbanas. Por ejemplo, la Unión Europea impuso recientemente restricciones al uso civil de drones (Reglamentos UE 2019/947 y 2019/945), especialmente en zonas urbanas. Estas regulaciones son menos restrictivas para los vehículos aéreos no tripulados pequeños, lo que recientemente ha llevado a un mayor interés por parte de los operadores civiles de vehículos aéreos no tripulados en vehículos aéreos no tripulados pequeños, por ejemplo, que pesen ≤ 250 gramos. Teniendo esto último en cuenta, este trabajo pretende investigar la viabilidad de utilizar pequeños drones para la detección de basura en orillas de ríos en un entorno urbano.
El área de estudio elegida para este estudio fue identificada como parte del río Mugna en Florencia, Italia. La Figura 1 muestra una parte del área considerada (100 m de largo).
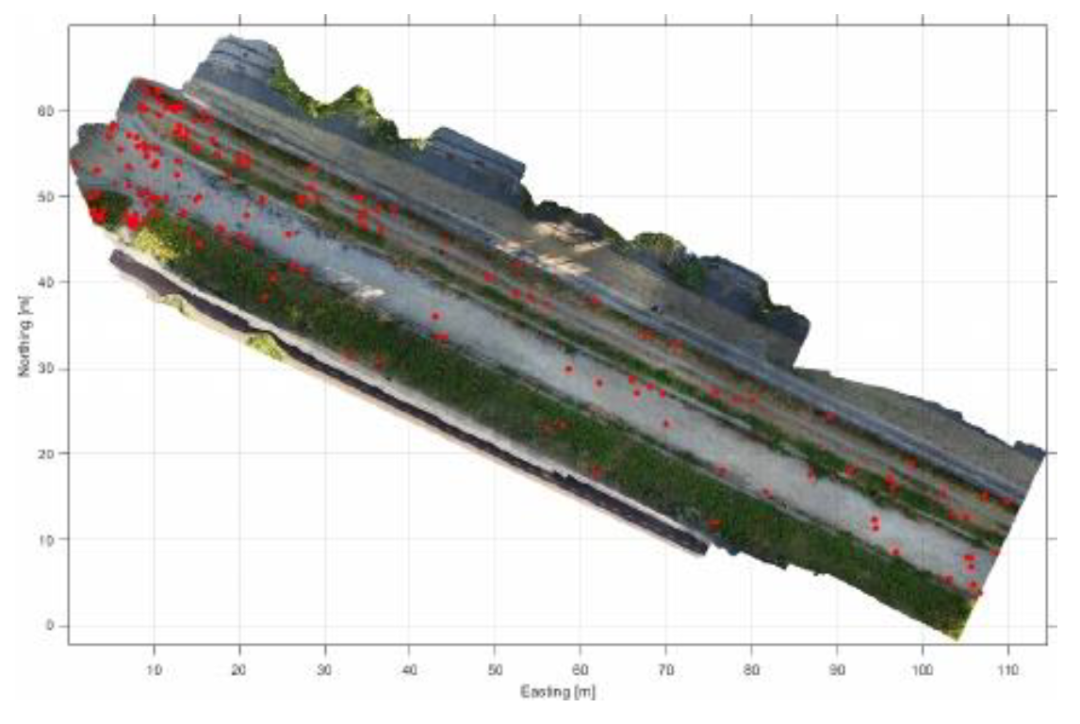
Figura 1 Basura contenida en el área de estudio (marcada en rojo)
Dentro del área mostrada en la Figura 1, se han identificado más de 150 basuras, marcadas en rojo, con una densidad espacial variable, llegando incluso a más de 9 objetos por metro (densidad lineal, por ejemplo en dirección perpendicular al tramo del río), como se muestra en la Figura 2.
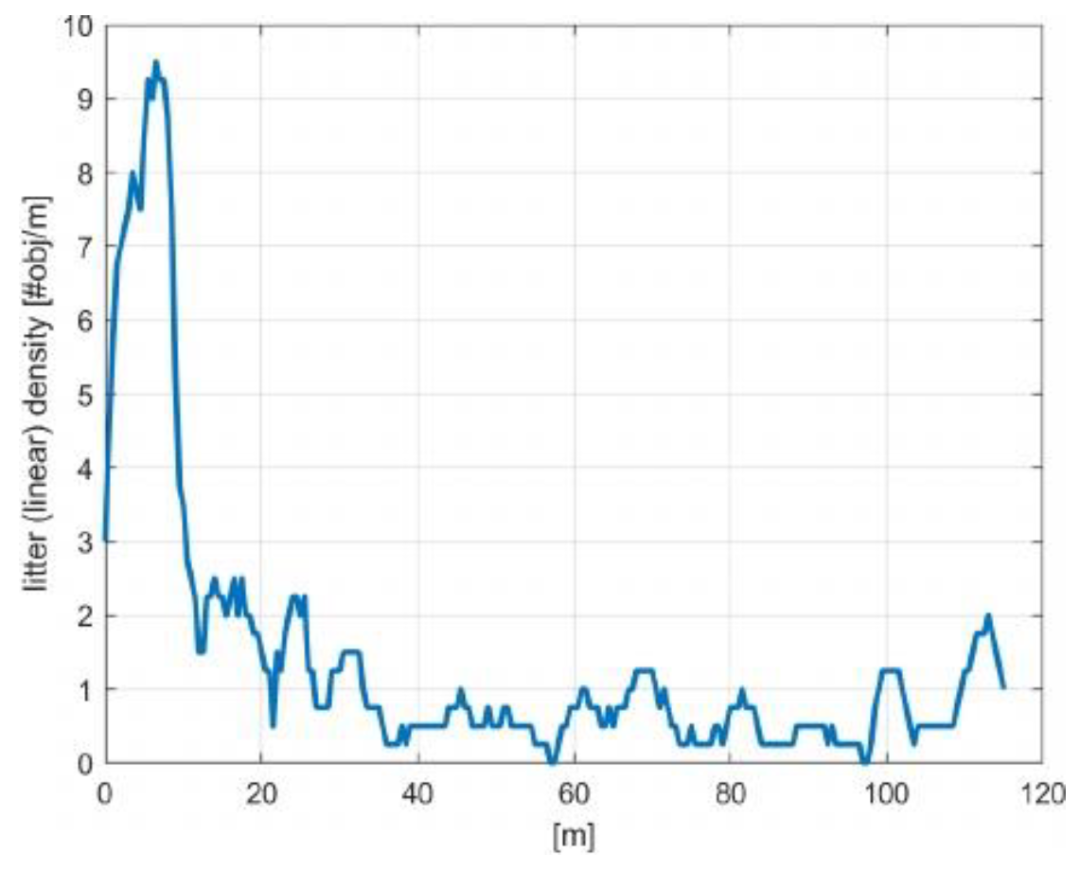
Figura 2 Densidad de basura (lineal) a lo largo del curso del río en el área de estudio
Las imágenes RGB fueron adquiridas con un UAV DJI Mini 2, como se muestra en la Figura 3, volando a diferentes altitudes sobre la región de interés.

Figura 3 UAV DJI Mini 2
El método propuesto se basa en la detección de basura a partir de imágenes RGB de microdrones utilizando métodos de aprendizaje profundo. La razón es que los microdrones se pueden utilizar para volar de forma autónoma o remota sobre un área de interés. Las imágenes adquiridas pueden luego transmitirse a una estación informática y procesarse casi en tiempo real.
Detección rápida de objetos utilizando la red Yolo v4: transfiera el aprendizaje desde la red Yolo v4, inicialmente entrenado previamente en el conjunto de datos COCO (Objetos comunes en contexto), utilizando cientos de imágenes basura de una base de datos pública. La Figura 4 presenta varios ejemplos de imágenes obtenidas de dichas bases de datos públicas.
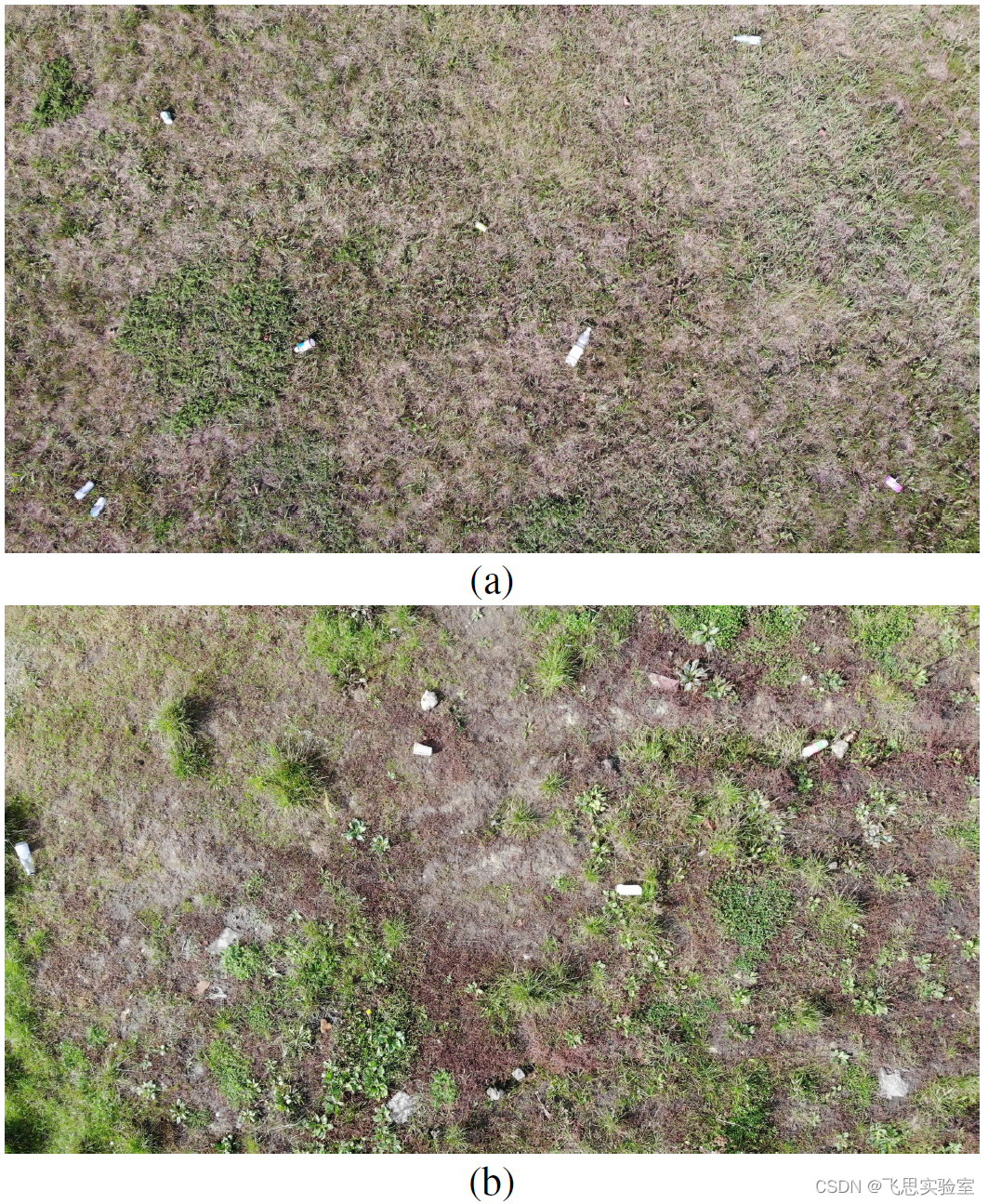
Figura 4 Una imagen de ejemplo obtenida de la base de datos de entrenamiento
Los fotogramas de vídeo captados por los microdrones se procesan mediante un algoritmo SLAM especialmente desarrollado. Se supone que la cámara del microdron está precalibrada y los fotogramas de vídeo se reducen a aproximadamente 0,5 megapíxeles antes de introducirlos en el algoritmo SLAM para que el proceso sea ejecutable en tiempo real. Más precisamente, se supone que las imágenes de UAV se adquieren con una cámara en la dirección del nadir, por lo tanto, el método visual ORB-SLAM propuesto, actualmente bastante estándar, se modifica para tener en cuenta esta información previa. La Figura 5 muestra ejemplos de detección de basura, mientras que la Figura 6 muestra ejemplos de falsos positivos y falsos negativos con detecciones falsas.

Figura 5 El proceso específico de implementación del algoritmo húngaro en el UAV

Figura 6 Ejemplos de errores de detección: (a) falso positivo, (b) falso negativo
El error de localización del método propuesto depende en gran medida de la distancia entre los puntos coincidentes con la ortofoto, que va desde unos pocos decímetros hasta incluso más de un metro. Este comportamiento es bastante estándar para cualquier enfoque basado en slam y, sin actualizaciones de localización confiables, se espera que la posición estimada se desvíe de la posición correcta.
En resumen, vale la pena señalar que el tamaño característico de la hojarasca está en la escala de decímetros, por lo que cuando el conjunto de puntos coincidentes con la ortofoto está bastante bien distribuido en la región de interés, se puede esperar obtener errores de localización del orden de la aplicación práctica es suficiente.
源自:ISPRS Annals of the Photogrametry, Remote Sensing and Spatial Information Sciences, Volumen X-4/W1-2022 Conferencia geoespacial 2022 – Sexta conferencia conjunta SMPR y cuarta GIResearch, 19-22 de febrero de 2023, Teherán, Irán (virtual)