경첩 관절은 두 개체가 공통 피벗 지점을 중심으로 회전할 수 있도록 하는 시뮬레이션된 물리적 시스템의 연결입니다. 이 연결은 문, 진자 시계, 로봇 팔 등의 다양한 물리적 움직임을 시뮬레이션하는 데 사용할 수 있습니다.
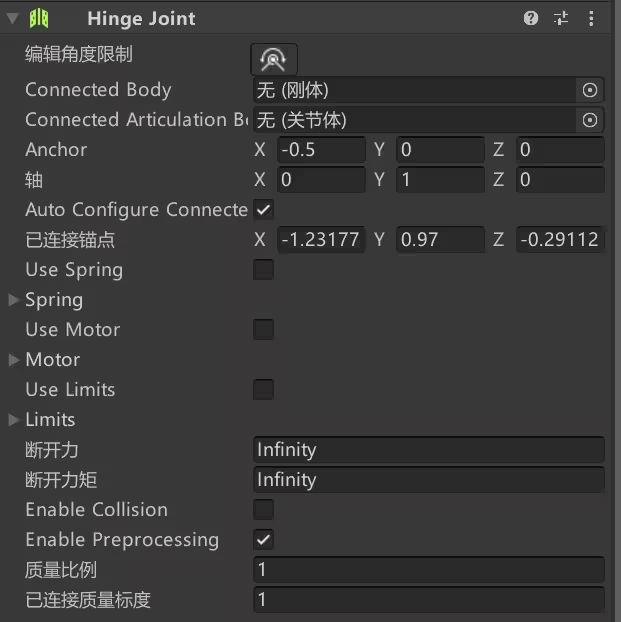
Connected Body : 힌지 조인트로 연결된 또 다른 강체입니다. 이 속성을 설정하면 현재 개체에 연결된 다른 개체를 지정할 수 있습니다.
앵커 : 앵커는 힌지 조인트에 연결된 강체의 한 점입니다. 그것은 강체에 상대적인 로컬 공간의 위치를 정의합니다. 힌지 조인트의 회전축은 앵커 포인트를 통과합니다.
Axis : 회전축은 회전할 방향을 정의합니다. 3차원 벡터이며 일반적으로 월드 공간의 단위 벡터입니다. 회전축을 설정하여 힌지 조인트의 회전 방향을 제어할 수 있습니다.
Use Limits : 이 속성은 관절의 제한이 활성화되는지 여부를 결정합니다. 활성화하면 최소 각도와 최대 각도를 설정하여 힌지 조인트의 회전 범위를 제한할 수 있습니다.
제한 : 제한이 활성화되면 힌지 조인트의 회전 범위를 설정할 수 있습니다. 최소 및 최대 각도는 힌지 조인트가 회전할 수 있는 각도 범위를 정의합니다.
모터 사용 : 힌지 조인트는 모터를 사용하여 회전력을 가할 수 있습니다. 이 속성은 모터의 활성화 여부를 결정합니다.
모터 : 모터가 활성화된 경우 회전 속도와 회전력을 설정할 수 있습니다. Rotation Velocity는 힌지 관절이 회전할 대상 속도를 정의하고 Rotation Force는 관절에 적용되는 힘의 양을 정의합니다.
스프링 사용 : 힌지 조인트의 탄성을 시뮬레이션하기 위해 스프링 속성을 사용할 수 있습니다. 이 속성을 활성화하면 스프링의 강성과 감쇠를 설정할 수 있습니다.
Spring : Spring이 활성화된 경우 스프링의 강성과 감쇠를 설정할 수 있습니다. 강성은 스프링의 강성을 정의하고 감쇠는 스프링의 감쇠비를 정의합니다.
이러한 매개변수를 설정하고 조정하여 필요에 따라 힌지 조인트의 동작을 제어할 수 있습니다. 이러한 매개변수를 사용하여 회전 범위를 제한하고 힘을 적용하고 탄성과 같은 효과를 시뮬레이션할 수 있습니다. 이러한 매개변수가 수행하는 작업을 이해하면 Unity에서 힌지 조인트로 원하는 물리학을 더 잘 달성하는 데 도움이 될 수 있습니다.