PPPH es un software de análisis y posicionamiento de precisión GNSS multisistema basado en MATLAB escrito por Berkay Bahadur. No solo es compatible con la interfaz gráfica (el documento oficial afirma que se requieren matlab2016a y versiones superiores, no tuve éxito en 2016a y utilizo matlab2018a directamente) también se puede ejecutar usando la línea de comando, lo cual es muy conveniente. , Se descubrieron algunos errores similares durante el proceso de depuración reciente, lo que resultó en una precisión insatisfactoria de los datos de muestra calculados. Los errores se enumeran a continuación, espero que pueda criticarlos y corregirlos.
En un archivo data_hand.m:
el nombre del archivo de la pista es incorrecto un día después de la línea 10
Código original:
if ~isempty(files.orbitb) && ~isempty(files.orbitb)
Después de la modificación:
if ~isempty(files.orbitb) && ~isempty(files.orbita)
2. En el archivo cs_detect.m:
línea 65, la longitud de onda de la segunda frecuencia es incorrecta durante la detección de deslizamiento del ciclo combinado GF
Código original: A = [1 -1; wavl (k, 1) -wavl (k, 1)];
después de la modificación: A = [1 -1; wavl (k, 1) -wavl (k,2)]; En el
archivo de tres valores atípicos.m:
cuando el deslizamiento del ciclo es ajustado por el polinomio de segundo orden en la línea 30, el número de puntos de ajuste es menor que 3 y
se agrega el siguiente código:
if(ran<3)
data.obs.st(st:fn,k) = 0;
break;
end
Línea 36
: El error de redundancia al calcular el error de peso unitario Código original:
rmse = sqrt(sum(V.^2)/ran);
Después de la modificación:
rmse = sqrt(sum(V.^2)/(ran-3));
4. En el archivo nmodel.m:
Línea 151: Error de índice de longitud de onda
Código original:
model(t,20) = ((wind_up(r_xyz,s_xyz,sun_xyz,prev))/2/pi)*wavl(k,1);
Después de la modificación:
model(t,20) = ((wind_up(r_xyz,s_xyz,sun_xyz,prev))/2/pi)*wavl(k,2);
5. En
la novena línea del archivo sat_apc.m, al calcular la corrección del centro de fase de la antena del satélite, la fórmula del coseno j en la dirección y de la matriz de conversión es incorrecta.
Código original:
j = cross(k,e);
Después de la modificación:
j = cross(k,e)./norm(cross(k,e));
El software modificado utiliza el modo estático de GPS único para procesar los datos de la muestra (ISTA00TUR_R_20171910000_01D_30S_MO.17o) Los resultados se comparan con las coordenadas de la solución del cielo IGS.
Estadísticas de error de dirección NEU
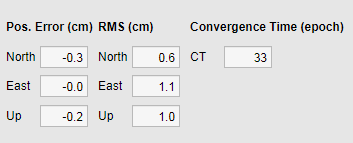
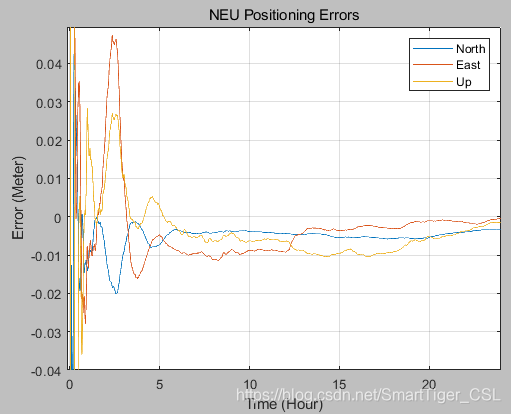
después de la convergencia : la coordenada de época final después de la convergencia es diferente de la coordenada IGS conocida, las tres desviaciones de las direcciones XYZ son:
X: 0,8 mm Y: -0,2 mm Z: -3,6 mm