Referencia : Visual slam14 talk
instrucciones : cuando vi el visual slam14 de Gao Xiang hablar sobre el ángulo de Euler, mencioné el problema de las cerraduras universales. No lo entendí la primera vez, y luego busqué en Internet. La explicación en video comienza con una gran cantidad de contenido. Luego hay varias imágenes que no entiendo mucho (estoy impaciente). Luego releo la parte del ángulo de Euler en el libro, ¡y generalmente entiendo la pérdida!
1. ángulo de Euler
Los ángulos de Euler proporcionan una forma muy intuitiva de describir la rotación: utiliza tres ángulos de rotación separados para descomponer una rotación en tres rotaciones sobre diferentes ejes.
Nos ZYX definimos de forma giratoria y sobre el eje de rotación después de la rotación, es decir, la primera rotación alrededor del eje Z, a continuación, la rotación alrededor del eje Y, y finalmente la rotación alrededor del eje X .
El ángulo de rotación ZYX es equivalente a descomponer cualquier rotación en los ángulos de rotación en los siguientes tres ejes:
1. Girar alrededor del eje Z del objeto para obtener el ángulo de guiñada;
2. Girar alrededor del eje Y después de la rotación para obtener la inclinación del ángulo de inclinación;
3. Girar Después de la rotación, el eje X gira para obtener el ángulo de balanceo;
en este momento, podemos usar [r, p, y] T un vector tridimensional para describir cualquier rotación. El orden de rotación del ángulo rpy es ZYX .
2. Desventajas
万向锁问题
奇异性问题
欧拉角不适于插值和迭代
SLAM中不直接使用欧拉角表达姿态
滤波或优化中使用欧拉角表达旋转
3. Problema de bloqueo universal
Cuando el ángulo de inclinación es de ± 90 °, la primera rotación y la tercera rotación usarán el mismo eje , haciendo que el sistema pierda un grado de libertad.
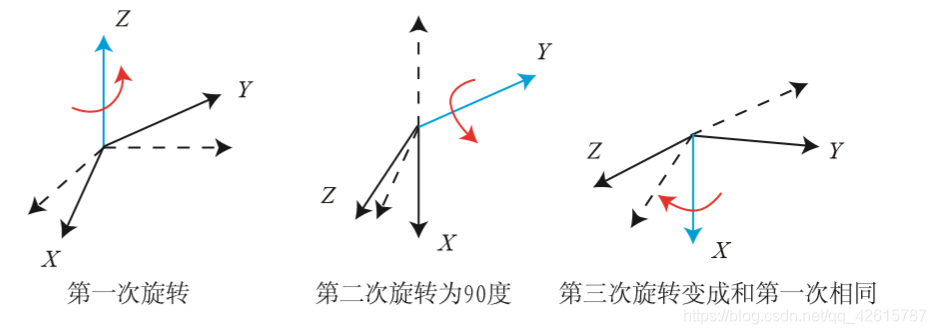
En el sistema de coordenadas original, experimentó sucesivamente tres rotaciones del eje ZYX. ¿Cómo entender la cerradura universal de acuerdo con la imagen de arriba? La clave es que la primera y la tercera rotación usarán el mismo eje .
Suponga que el sistema de coordenadas del mundo es el siguiente:
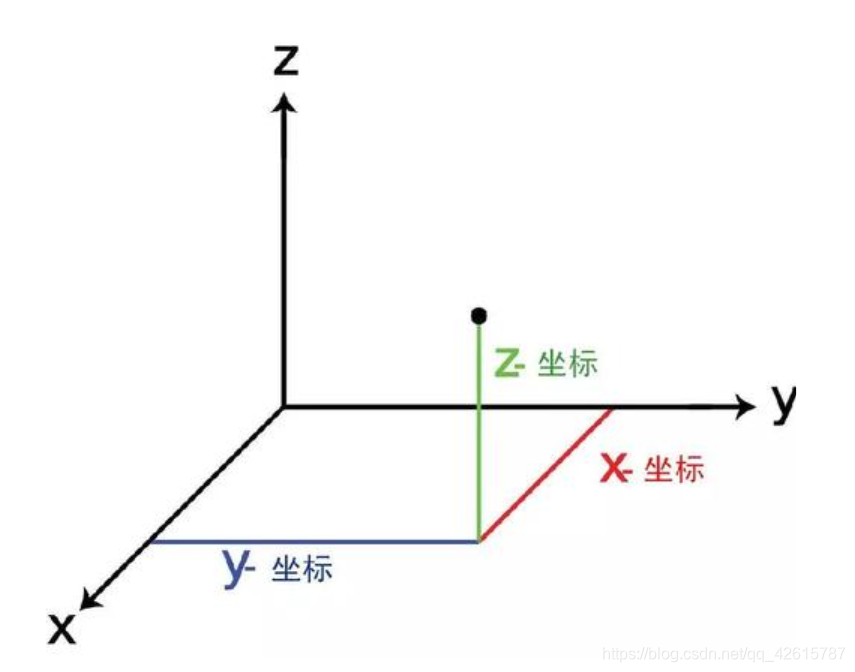
del diagrama del proceso de rotación, se puede ver que la primera rotación alrededor del eje Z y la tercera rotación alrededor del eje X, el eje X y el eje Z se colocan debajo del sistema de coordenadas del mundo en la figura anterior, de hecho, ambos En la línea donde se encuentra el eje Z del sistema de coordenadas mundial . Es solo la dirección opuesta. Entonces, ¿no puede considerarse que gira alrededor de la misma línea vertical cuando la tercera rotación alrededor del eje X y la primera rotación alrededor del eje Z ? Esta es la tercera rotación de cualquier ángulo y puedo hacerlo la primera vez.
Nota: Lo
anterior es solo para su propia comprensión, si desea corregirme, ¡gracias!
