The effect of the encoder can be used for dimension reduction, add noise study can be obtained from the de-noising.
The following single hidden layer using the training data set mnist and shared weights symmetrical weight parameters.
The model itself is not difficult, the debugging process there are several places to note:
- The initial value of a weight parameter model sensitive to the right, so here do some limitations on the weighting parameter w
- The need for data standardization
- Learning rate set reasonable (Adam, 0.001)
1, model
Import numpy AS NP Import tensorflow TF AS class AutoEncoder (Object): '' ' using the weight parameters of a symmetrical structure, the decoder reuse encoder ' '' DEF the __init__ (Self, input_shape, h1_size, LR): tf.reset_default_graph () # FIG reset the default calculation, sometimes after an error memory further mess with tf.variable_scope ( ' auto_encoder ' , Reuse = tf.AUTO_REUSE): self.W1 = self.weights (Shape = (input_shape, h1_size), = name ' h1 of ' ) self.b1 = self.bias (h1_size) self.W2 = tf.transpose (tf.get_variable ('h1')) # 共享参数,使用其转置 self.b2 = self.bias(input_shape) self.lr = lr self.input = tf.placeholder(shape=(None, input_shape), dtype=tf.float32) self.h1_out = tf.nn.softplus(tf.matmul(self.input, self.W1) + self.b1)# softplus,类relu self.out = tf.matmul(self.h1_out, self.W2) + self.b2 self.optimizer = tf.train.AdamOptimizer(learning_rate=self.lr) self.loss = 0.1 * tf.reduce_sum( tf.pow(tf.subtract(self.input, self.out), 2)) self.train_op = self.optimizer.minimize(self.loss) self.sess = tf.Session() self.sess.run(tf.global_variables_initializer()) def fit(self, X, epoches=100, batch_size=128, epoches_to_display=10): batchs_per_epoch = X.shape[0] // batch_size for i in range(epoches): epoch_loss = [] for j in range(batchs_per_epoch): X_train X-= [J * the batch_size: (J +. 1) * the batch_size] Loss, _ = self.sess.run ([self.loss, self.train_op], feed_dict = {self.input: X_train}) epoch_loss.append (Loss ) IF I% epoches_to_display == 0: Print ( ' avg_loss AT Epoch% D: F% ' % (I, np.mean (epoch_loss))) # return self.sess.run (W1 of) # weight initialization reference others, this is actually very important! With their own set of normally distributed random truncation has no effect DEF weights (Self, Shape, name, Constant =. 1 ): fan_in = Shape [0] fan_out = shape[1] low = -constant * np.sqrt(6.0 / (fan_in + fan_out)) high = constant * np.sqrt(6.0 / (fan_in + fan_out)) init = tf.random_uniform_initializer(minval=low, maxval=high) return tf.get_variable(name=name, shape=shape, initializer=init, dtype=tf.float32) def bias(self, size): return tf.Variable(tf.constant(0, dtype=tf.float32, shape=[size])) def encode(self, X): return self.sess.run(self.h1_out, feed_dict={self.input: X}) def decode(self, h): return self.sess.run(self.out, feed_dict={self.h1_out: h}) def reconstruct(self, X): return self.sess.run(self.out, feed_dict={self.input: X})
2, the data loading and pretreatment
from keras.datasets Import MNIST (X_train, y_train), (X_test, android.permission.FACTOR.) = mnist.load_data () Import Random X_train = X_train.reshape (-1, 784 ) # test set 10 in a random test image used test_idxs = random .sample (Range (X_test.shape [0]), 10 ) data_test = X_test [test_idxs] .reshape (-1, 784 ) # normalized Import sklearn.preprocessing AS Prep Processer = prep.StandardScaler (). Fit (X_train) # here is good with all the data, this is also very critical! = X_train processer.transform (X_train) X_test =processer.transform (data_test) # random 5000 pictures used as training idxs = random.sample (the Range (X_train.shape [0]), 5000 ) data_train = X_train [idxs]
3, training
= AutoEncoder Model (784, 200, 0.001) # learning rate is a bit big impact on the loss model.fit (data_train, batch_size = 128, Epoches = 200) # 200 Lun can
4, testing, visual comparison of FIG.
decoded_test = model.reconstruct(X_test) import matplotlib.pyplot as plt %matplotlib inline shape = (28, 28) fig, axes = plt.subplots(2,10, figsize=(10, 2), subplot_kw={ 'xticks': [], 'yticks': [] }, gridspec_kw=dict(hspace=0.1, wspace=0.1)) for i in range(10): axes[0][i].imshow(np.reshape(X_test[i], shape)) axes[1][i].imshow(np.reshape(decoded_test[i], shape)) plt.show()
The results are as follows:
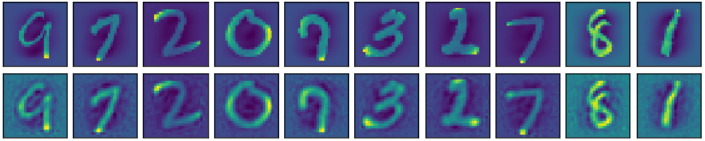
Above, you can add Gaussian noise at the input point, increasing robustness.