Take off with one click
References and Citations
1. The original article by CSDN blogger "War Fruit" follows the CC 4.0 BY-SA copyright agreement.
Original text: https://blog.csdn.net/EnthusiasmZing/article/details/79165152Quick link
2. Flight control reference website
https://gaas.gitbook.io/guide/software-realization-build-your-own-autonomous-drone/wu-ren-ji-zi-dong-jia-shi-xi-lie-offboard-kong-zhi- yi-ji-gazebo-fang-zhen quick link
Table of contents
- Take off with one click
-
- References and Citations
-
-
- 1. The original article by CSDN blogger "War Fruit" follows the CC 4.0 BY-SA copyright agreement.
- 2. Flight control reference website
- 1. One-click takeoff function package creation and code compilation
- 2. One-click takeoff code operation
- 3. Modify the position of the drone after taking off with one click
- 4. One-click takeoff python version
-
- flight control
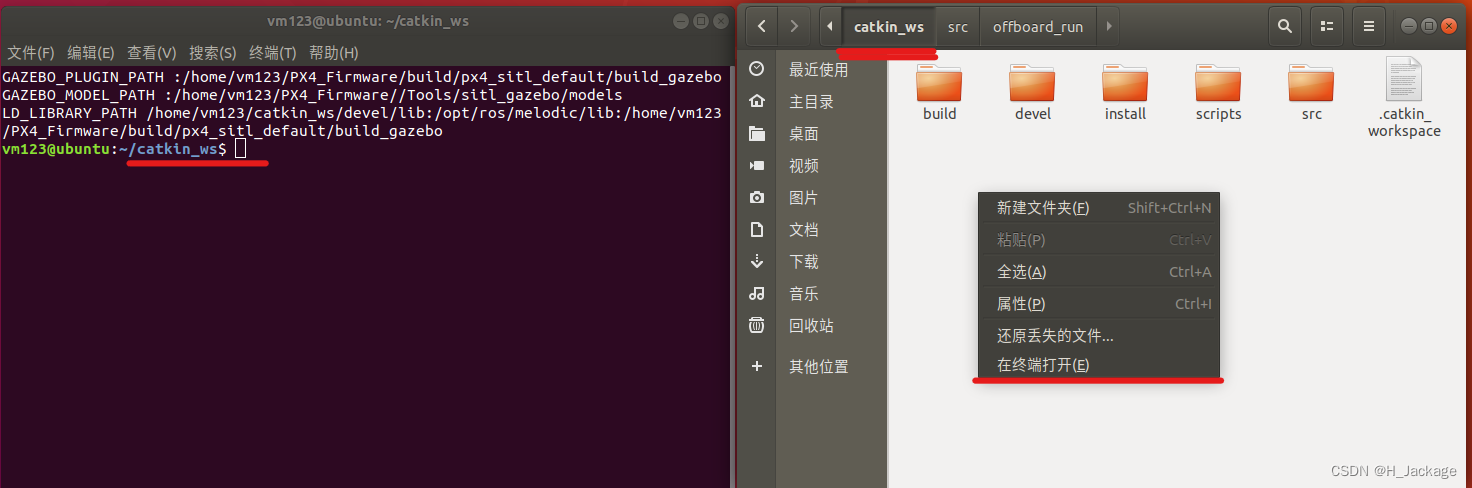
1. One-click takeoff function package creation and code compilation
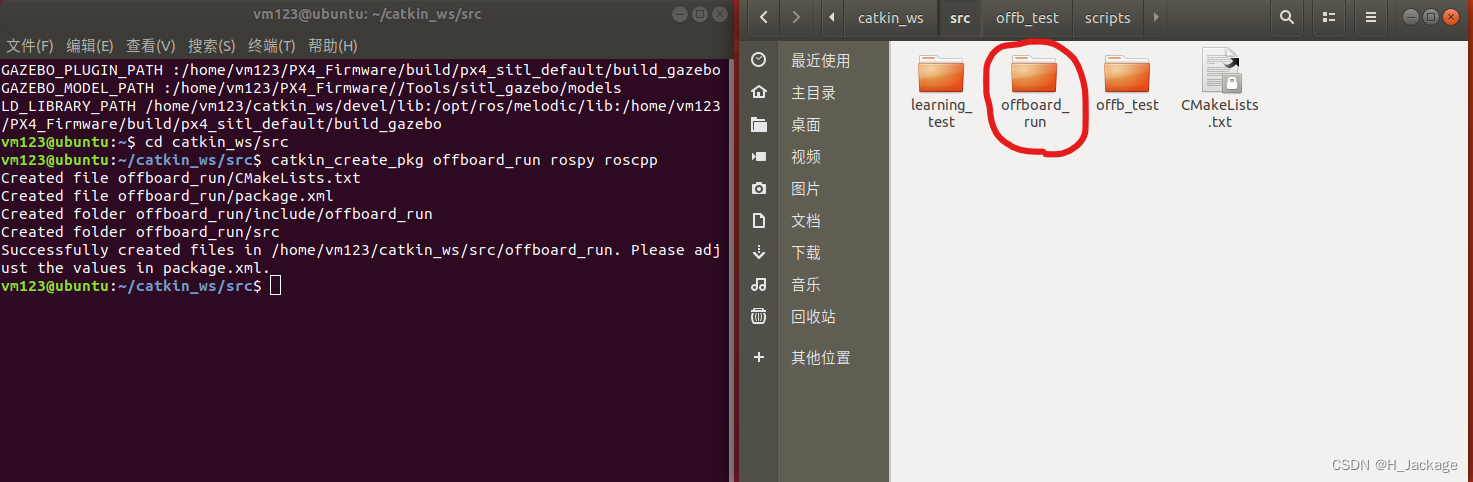
- Create a new feature package named
offboard_run
Terminal input
cd catkin_ws/src //在catkin_ws/src/这个文件夹里面再进行创建
Then in the src folder
catkin_create_pkg offboard_run rospy roscpp
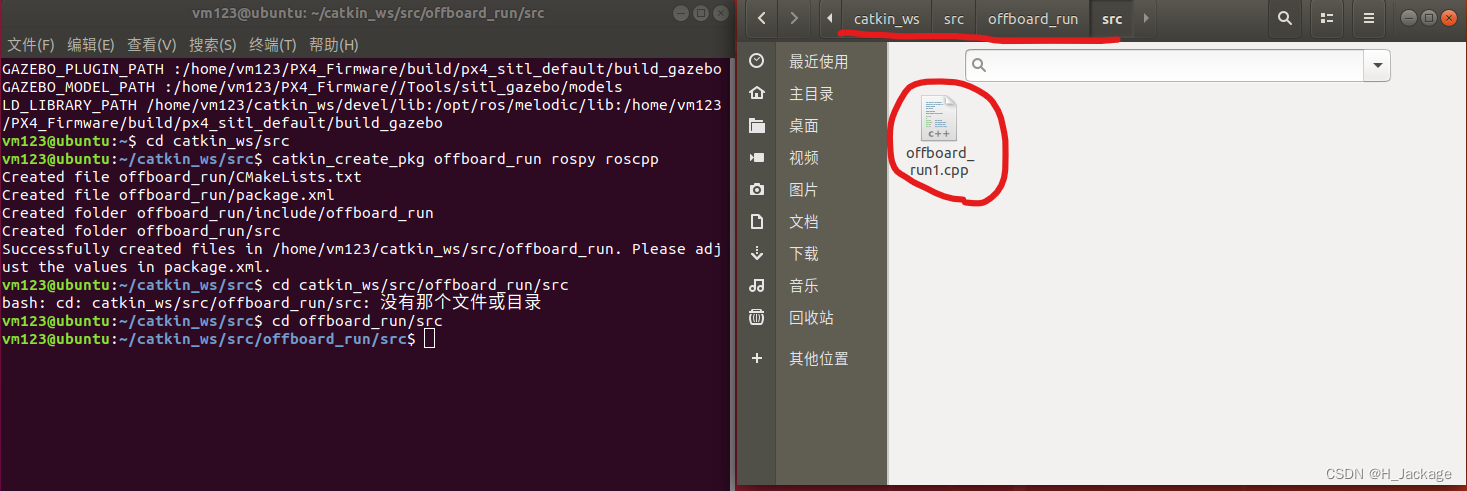
- In the newly created function package
offboard_run(src文件path:catkin_ws/src/offboard_run/src
), put the one-click takeoff code
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
————————————————
版权声明:本文为CSDN博主「战争果子」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/EnthusiasmZing/article/details/79165152
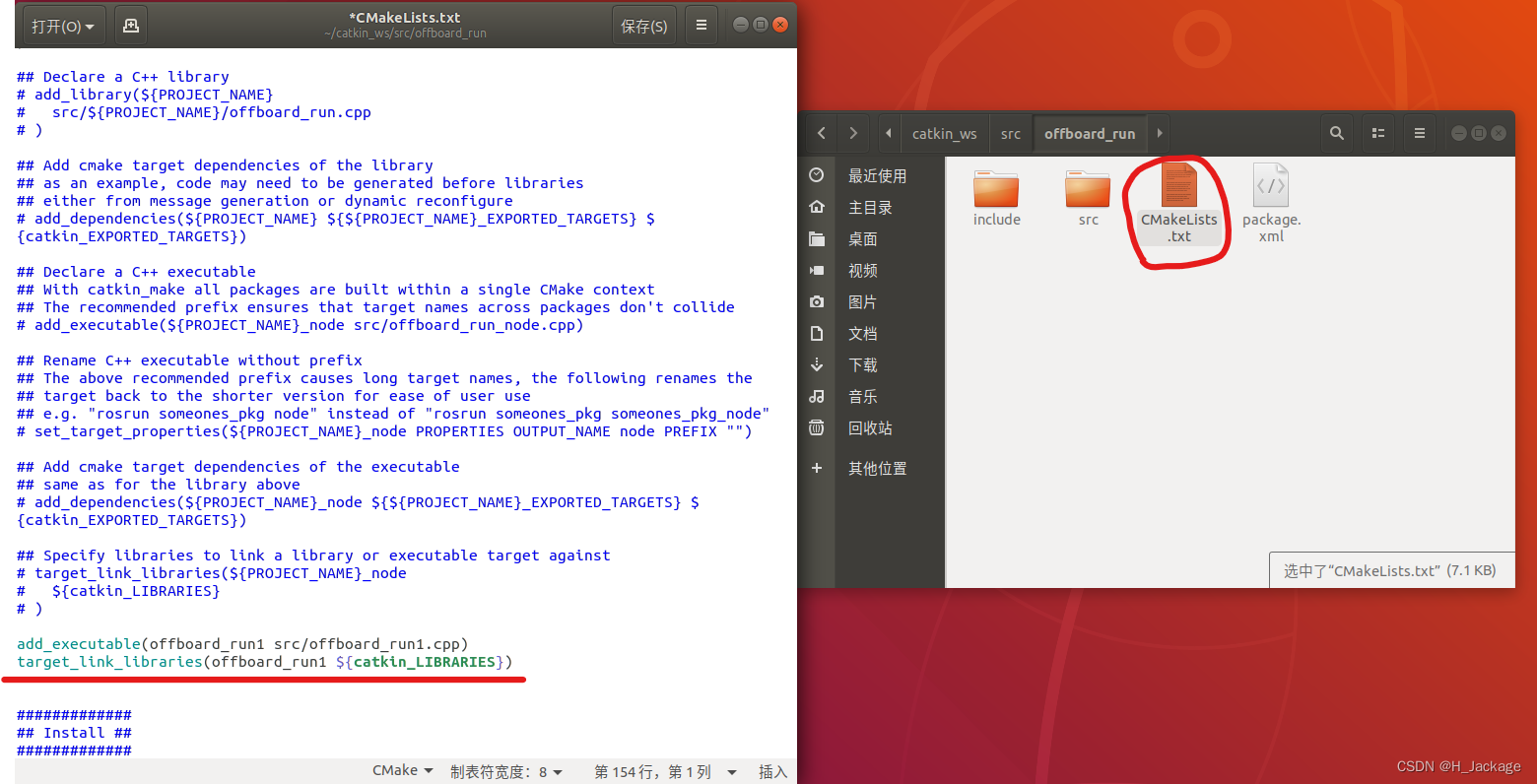
3. Compile the one-click takeoff code
offboard_run①Go to the file in the function package we created CMakeLists.txt, Buildadd the following two lines of code at the end, then save and close
add_executable(offboard_run1 src/offboard_run1.cpp)
target_link_libraries(offboard_run1 ${
catkin_LIBRARIES})
②Go to catkin_wsthe directory to compile the workspace (that is, compile the C++ code we just added)
Terminal input
catkin_make
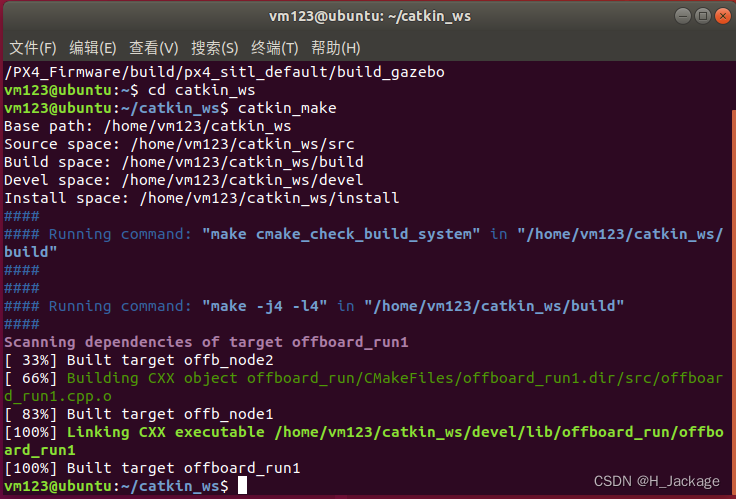
The result shown in the figure above indicates that the compilation has been completed.
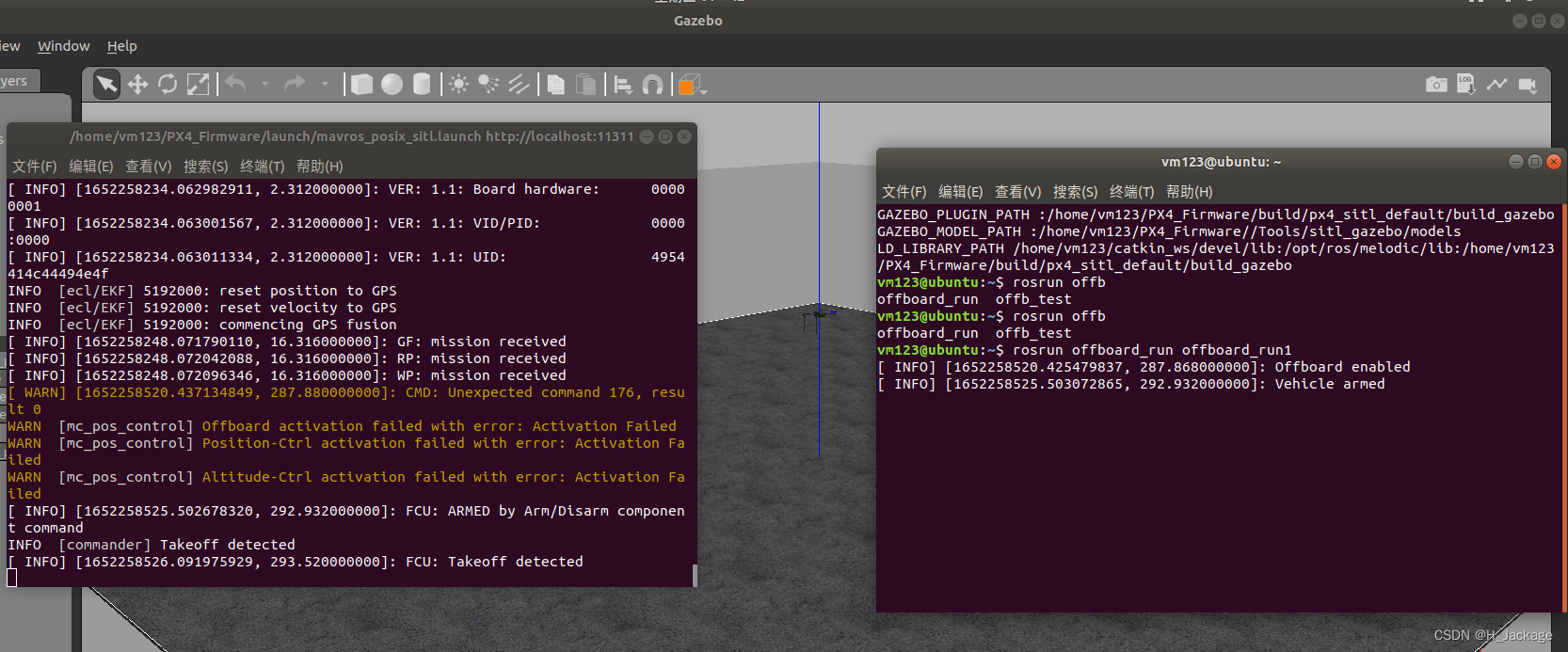
2. One-click takeoff code operation
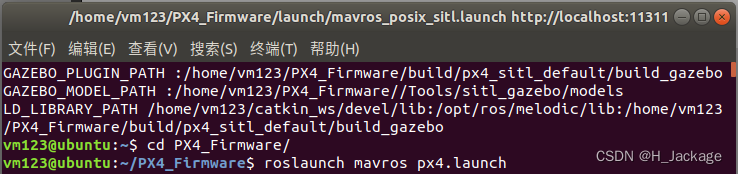
- Open PX4 simulation and
enter in the terminal first
cd PX4_Firmware/
Enter again
roslaunch px4 mavros_posix_sitl.launch
After the simulation interface appears, we open a new terminal ( ctrl+alt+T)
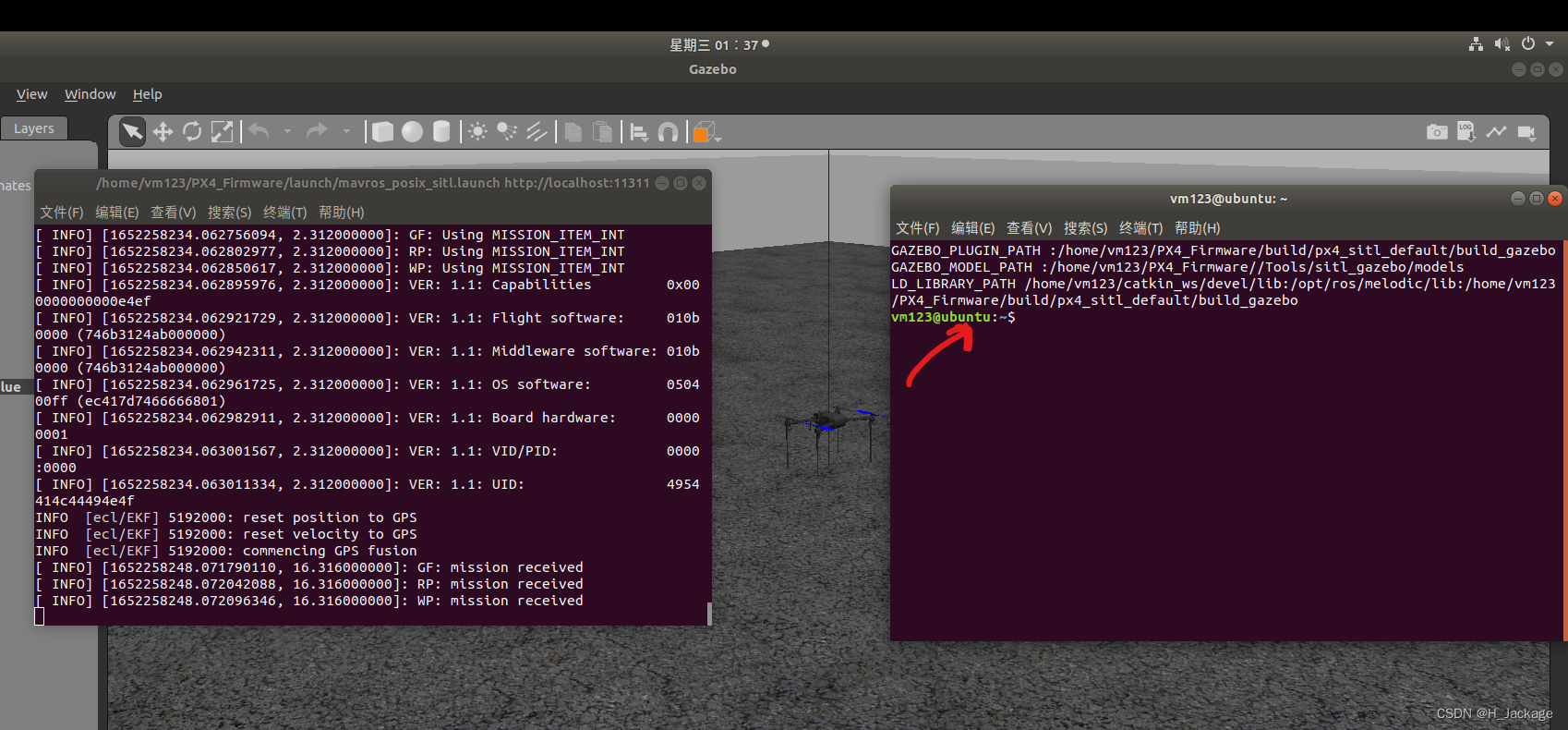
terminal input
rosrun offboard_run offboard_run1
Run the one-click takeoff code, and you can see from the simulation interface that the drone has taken off.
NOTE: Commands that
can be used to run the coderosrun
rosrun [代码所在功能包的名] [代码文件名(不用加.cpp)]
Finally, end the hovering of the drone and stop directly at the terminal ctrl+C. At this time, the drone will start the safe landing mode and land on its own.
3. Modify the position of the drone after taking off with one click
Just modify the x, y, and z values in the code file. Remember to save and compile again before running
Or create another file offboard_run2.cpp, offboard_run3.cppetc. The coordinate positions set in each code are different.
4. One-click takeoff python version
1. offboard_runFirst create a folder in the function package named scriptsspecifically to place python files
. Then put the python code for one-click takeoff into scriptsthe file. Here it is namedpx4_mavros_run.py
import rospy
from mavros_msgs.msg import GlobalPositionTarget, State, PositionTarget
from mavros_msgs.srv import CommandBool, CommandTOL, SetMode
from geometry_msgs.msg import PoseStamped, Twist
from sensor_msgs.msg import Imu, NavSatFix
from std_msgs.msg import Float32, Float64, String
import time
from pyquaternion import Quaternion
import math
import threading
class Px4Controller:
def __init__(self):
self.imu = None
self.gps = None
self.local_pose = None
self.current_state = None
self.current_heading = None
self.takeoff_height = 3.2
self.local_enu_position = None
self.cur_target_pose = None
self.global_target = None
self.received_new_task = False
self.arm_state = False
self.offboard_state = False
self.received_imu = False
self.frame = "BODY"
self.state = None
'''
ros subscribers
'''
self.local_pose_sub = rospy.Subscriber("/mavros/local_position/pose", PoseStamped, self.local_pose_callback)
self.mavros_sub = rospy.Subscriber("/mavros/state", State, self.mavros_state_callback)
self.gps_sub = rospy.Subscriber("/mavros/global_position/global", NavSatFix, self.gps_callback)
self.imu_sub = rospy.Subscriber("/mavros/imu/data", Imu, self.imu_callback)
self.set_target_position_sub = rospy.Subscriber("gi/set_pose/position", PoseStamped, self.set_target_position_callback)
self.set_target_yaw_sub = rospy.Subscriber("gi/set_pose/orientation", Float32, self.set_target_yaw_callback)
self.custom_activity_sub = rospy.Subscriber("gi/set_activity/type", String, self.custom_activity_callback)
'''
ros publishers
'''
self.local_target_pub = rospy.Publisher('mavros/setpoint_raw/local', PositionTarget, queue_size=10)
'''
ros services
'''
self.armService = rospy.ServiceProxy('/mavros/cmd/arming', CommandBool)
self.flightModeService = rospy.ServiceProxy('/mavros/set_mode', SetMode)
print("Px4 Controller Initialized!")
def start(self):
rospy.init_node("offboard_node")
for i in range(10):
if self.current_heading is not None:
break
else:
print("Waiting for initialization.")
time.sleep(0.5)
self.cur_target_pose = self.construct_target(0, 0, self.takeoff_height, self.current_heading)
#print ("self.cur_target_pose:", self.cur_target_pose, type(self.cur_target_pose))
for i in range(10):
self.local_target_pub.publish(self.cur_target_pose)
self.arm_state = self.arm()
self.offboard_state = self.offboard()
time.sleep(0.2)
if self.takeoff_detection():
print("Vehicle Took Off!")
else:
print("Vehicle Took Off Failed!")
return
'''
main ROS thread
'''
while self.arm_state and self.offboard_state and (rospy.is_shutdown() is False):
self.local_target_pub.publish(self.cur_target_pose)
if (self.state is "LAND") and (self.local_pose.pose.position.z < 0.15):
if(self.disarm()):
self.state = "DISARMED"
time.sleep(0.1)
def construct_target(self, x, y, z, yaw, yaw_rate = 1):
target_raw_pose = PositionTarget()
target_raw_pose.header.stamp = rospy.Time.now()
target_raw_pose.coordinate_frame = 9
target_raw_pose.position.x = x
target_raw_pose.position.y = y
target_raw_pose.position.z = z
target_raw_pose.type_mask = PositionTarget.IGNORE_VX + PositionTarget.IGNORE_VY + PositionTarget.IGNORE_VZ \
+ PositionTarget.IGNORE_AFX + PositionTarget.IGNORE_AFY + PositionTarget.IGNORE_AFZ \
+ PositionTarget.FORCE
target_raw_pose.yaw = yaw
target_raw_pose.yaw_rate = yaw_rate
return target_raw_pose
'''
cur_p : poseStamped
target_p: positionTarget
'''
def position_distance(self, cur_p, target_p, threshold=0.1):
delta_x = math.fabs(cur_p.pose.position.x - target_p.position.x)
delta_y = math.fabs(cur_p.pose.position.y - target_p.position.y)
delta_z = math.fabs(cur_p.pose.position.z - target_p.position.z)
if (delta_x + delta_y + delta_z < threshold):
return True
else:
return False
def local_pose_callback(self, msg):
self.local_pose = msg
self.local_enu_position = msg
def mavros_state_callback(self, msg):
self.mavros_state = msg.mode
def imu_callback(self, msg):
global global_imu, current_heading
self.imu = msg
self.current_heading = self.q2yaw(self.imu.orientation)
self.received_imu = True
def gps_callback(self, msg):
self.gps = msg
def FLU2ENU(self, msg):
FLU_x = msg.pose.position.x * math.cos(self.current_heading) - msg.pose.position.y * math.sin(self.current_heading)
FLU_y = msg.pose.position.x * math.sin(self.current_heading) + msg.pose.position.y * math.cos(self.current_heading)
FLU_z = msg.pose.position.z
return FLU_x, FLU_y, FLU_z
def set_target_position_callback(self, msg):
print("Received New Position Task!")
if msg.header.frame_id == 'base_link':
'''
BODY_FLU
'''
# For Body frame, we will use FLU (Forward, Left and Up)
# +Z +X
# ^ ^
# | /
# |/
# +Y <------body
self.frame = "BODY"
print("body FLU frame")
ENU_X, ENU_Y, ENU_Z = self.FLU2ENU(msg)
ENU_X = ENU_X + self.local_pose.pose.position.x
ENU_Y = ENU_Y + self.local_pose.pose.position.y
ENU_Z = ENU_Z + self.local_pose.pose.position.z
self.cur_target_pose = self.construct_target(ENU_X,
ENU_Y,
ENU_Z,
self.current_heading)
else:
'''
LOCAL_ENU
'''
# For world frame, we will use ENU (EAST, NORTH and UP)
# +Z +Y
# ^ ^
# | /
# |/
# world------> +X
self.frame = "LOCAL_ENU"
print("local ENU frame")
self.cur_target_pose = self.construct_target(msg.pose.position.x,
msg.pose.position.y,
msg.pose.position.z,
self.current_heading)
'''
Receive A Custom Activity
'''
def custom_activity_callback(self, msg):
print("Received Custom Activity:", msg.data)
if msg.data == "LAND":
print("LANDING!")
self.state = "LAND"
self.cur_target_pose = self.construct_target(self.local_pose.pose.position.x,
self.local_pose.pose.position.y,
0.1,
self.current_heading)
if msg.data == "HOVER":
print("HOVERING!")
self.state = "HOVER"
self.hover()
else:
print("Received Custom Activity:", msg.data, "not supported yet!")
def set_target_yaw_callback(self, msg):
print("Received New Yaw Task!")
yaw_deg = msg.data * math.pi / 180.0
self.cur_target_pose = self.construct_target(self.local_pose.pose.position.x,
self.local_pose.pose.position.y,
self.local_pose.pose.position.z,
yaw_deg)
'''
return yaw from current IMU
'''
def q2yaw(self, q):
if isinstance(q, Quaternion):
rotate_z_rad = q.yaw_pitch_roll[0]
else:
q_ = Quaternion(q.w, q.x, q.y, q.z)
rotate_z_rad = q_.yaw_pitch_roll[0]
return rotate_z_rad
def arm(self):
if self.armService(True):
return True
else:
print("Vehicle arming failed!")
return False
def disarm(self):
if self.armService(False):
return True
else:
print("Vehicle disarming failed!")
return False
def offboard(self):
if self.flightModeService(custom_mode='OFFBOARD'):
return True
else:
print("Vechile Offboard failed")
return False
def hover(self):
self.cur_target_pose = self.construct_target(self.local_pose.pose.position.x,
self.local_pose.pose.position.y,
self.local_pose.pose.position.z,
self.current_heading)
def takeoff_detection(self):
if self.local_pose.pose.position.z > 0.1 and self.offboard_state and self.arm_state:
return True
else:
return False
if __name__ == '__main__':
con = Px4Controller()
con.start()
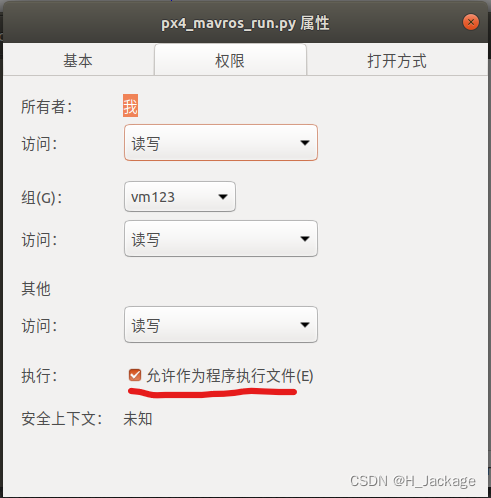
Then remember to modify the permissions of the python file and tick 2 in the execution area.
Similarly, first start the PX4 simulation (refer to the above steps)
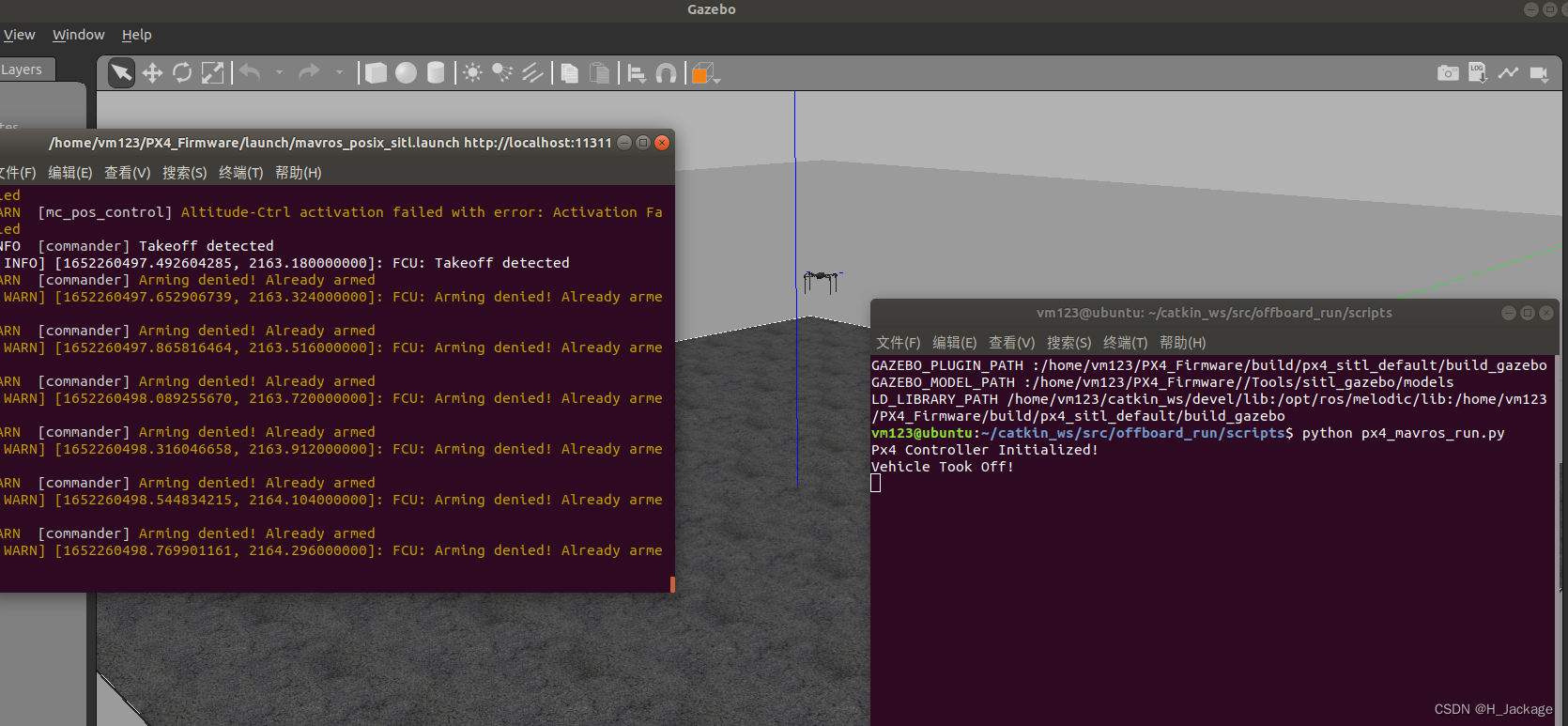
and then go to the directory where the python code was just stored, open the terminal and
enter directly in the terminal
python px4_mavros_run.py
At this point you can see that the drone took off successfully
flight control
1. Code
- Put the code to control the drone
catkin_ws/src/offboard_run/scripts. There are two python code files here. Put the
commander.py code into the path as follows:
import rospy
from mavros_msgs.msg import GlobalPositionTarget, State
from mavros_msgs.srv import CommandBool, CommandTOL, SetMode
from geometry_msgs.msg import PoseStamped, Twist
from sensor_msgs.msg import Imu, NavSatFix
from std_msgs.msg import Float32, String
from pyquaternion import Quaternion
import time
import math
class Commander:
def __init__(self):
rospy.init_node("commander_node")
rate = rospy.Rate(20)
self.position_target_pub = rospy.Publisher('gi/set_pose/position', PoseStamped, queue_size=10)
self.yaw_target_pub = rospy.Publisher('gi/set_pose/orientation', Float32, queue_size=10)
self.custom_activity_pub = rospy.Publisher('gi/set_activity/type', String, queue_size=10)
def move(self, x, y, z, BODY_OFFSET_ENU=True):
self.position_target_pub.publish(self.set_pose(x, y, z, BODY_OFFSET_ENU))
def turn(self, yaw_degree):
self.yaw_target_pub.publish(yaw_degree)
# land at current position
def land(self):
self.custom_activity_pub.publish(String("LAND"))
# hover at current position
def hover(self):
self.custom_activity_pub.publish(String("HOVER"))
# return to home position with defined height
def return_home(self, height):
self.position_target_pub.publish(self.set_pose(0, 0, height, False))
def set_pose(self, x=0, y=0, z=2, BODY_FLU = True):
pose = PoseStamped()
pose.header.stamp = rospy.Time.now()
# ROS uses ENU internally, so we will stick to this convention
if BODY_FLU:
pose.header.frame_id = 'base_link'
else:
pose.header.frame_id = 'map'
pose.pose.position.x = x
pose.pose.position.y = y
pose.pose.position.z = z
return pose
if __name__ == "__main__":
con = Commander()
time.sleep(2)
con.move(1, 0, 0)
time.sleep(2)
con.turn(90)
time.sleep(2)
con.land()
The conclude.py code is as follows:
import rospy
from mavros_msgs.msg import GlobalPositionTarget, State,PositionTarget
from mavros_msgs.srv import CommandBool, CommandTOL, SetMode
from geometry_msgs.msg import PoseStamped, Twist
from sensor_msgs.msg import Imu, NavSatFix
from std_msgs.msg import Float32,Float64,String
from pyquaternion import Quaternion
import time
import math
import threading
class Px4Controller:
def __init__(self):
self.imu = None
self.gps = None
self.local_pose = None
self.current_state = None
self.current_heading = None
self.takeoff_height = 3.2
self.local_enu_position = None
self.cur_target_pose = None
self.global_target = None
self.received_new_task = False
self.arm_state = False
self.offboard_state = False
self.received_imu = False
self.frame = "BODY"
self.state = None
'''
ros subscribers
'''
self.local_pose_sub = rospy.Subscriber("/mavros/local_position/pose", PoseStamped, self.local_pose_callback)
self.mavros_sub = rospy.Subscriber("/mavros/state", State, self.mavros_state_callback)
self.gps_sub = rospy.Subscriber("/mavros/global_position/global", NavSatFix, self.gps_callback)
self.imu_sub = rospy.Subscriber("/mavros/imu/data", Imu, self.imu_callback)
self.set_target_position_sub = rospy.Subscriber("gi/set_pose/position", PoseStamped, self.set_target_position_callback)
self.set_target_yaw_sub = rospy.Subscriber("gi/set_pose/orientation", Float32, self.set_target_yaw_callback)
self.custom_activity_sub = rospy.Subscriber("gi/set_activity/type", String, self.custom_activity_callback)
'''
ros publishers
'''
self.local_target_pub = rospy.Publisher('mavros/setpoint_raw/local', PositionTarget, queue_size=10)
'''
ros services
'''
self.armService = rospy.ServiceProxy('/mavros/cmd/arming', CommandBool)
self.flightModeService = rospy.ServiceProxy('/mavros/set_mode', SetMode)
print("Px4 Controller Initialized!")
def start(self):
rospy.init_node("offboard_node")
for i in range(10):
if self.current_heading is not None:
break
else:
print("Waiting for initialization.")
time.sleep(0.5)
self.cur_target_pose = self.construct_target(0, 0, self.takeoff_height, self.current_heading)
#print ("self.cur_target_pose:", self.cur_target_pose, type(self.cur_target_pose))
for i in range(10):
self.local_target_pub.publish(self.cur_target_pose)
self.arm_state = self.arm()
self.offboard_state = self.offboard()
time.sleep(0.2)
if self.takeoff_detection():
print("Vehicle Took Off!")
else:
print("Vehicle Took Off Failed!")
return
'''
main ROS thread
'''
while self.arm_state and self.offboard_state and (rospy.is_shutdown() is False):
self.local_target_pub.publish(self.cur_target_pose)
if (self.state is "LAND") and (self.local_pose.pose.position.z < 0.15):
if(self.disarm()):
self.state = "DISARMED"
time.sleep(0.1)
def construct_target(self, x, y, z, yaw, yaw_rate = 1):
target_raw_pose = PositionTarget()
target_raw_pose.header.stamp = rospy.Time.now()
target_raw_pose.coordinate_frame = 9
target_raw_pose.position.x = x
target_raw_pose.position.y = y
target_raw_pose.position.z = z
target_raw_pose.type_mask = PositionTarget.IGNORE_VX + PositionTarget.IGNORE_VY + PositionTarget.IGNORE_VZ \
+ PositionTarget.IGNORE_AFX + PositionTarget.IGNORE_AFY + PositionTarget.IGNORE_AFZ \
+ PositionTarget.FORCE
target_raw_pose.yaw = yaw
target_raw_pose.yaw_rate = yaw_rate
return target_raw_pose
'''
cur_p : poseStamped
target_p: positionTarget
'''
def position_distance(self, cur_p, target_p, threshold=0.1):
delta_x = math.fabs(cur_p.pose.position.x - target_p.position.x)
delta_y = math.fabs(cur_p.pose.position.y - target_p.position.y)
delta_z = math.fabs(cur_p.pose.position.z - target_p.position.z)
if (delta_x + delta_y + delta_z < threshold):
return True
else:
return False
def local_pose_callback(self, msg):
self.local_pose = msg
self.local_enu_position = msg
def mavros_state_callback(self, msg):
self.mavros_state = msg.mode
def imu_callback(self, msg):
global global_imu, current_heading
self.imu = msg
self.current_heading = self.q2yaw(self.imu.orientation)
self.received_imu = True
def gps_callback(self, msg):
self.gps = msg
def FLU2ENU(self, msg):
FLU_x = msg.pose.position.x * math.cos(self.current_heading) - msg.pose.position.y * math.sin(self.current_heading)
FLU_y = msg.pose.position.x * math.sin(self.current_heading) + msg.pose.position.y * math.cos(self.current_heading)
FLU_z = msg.pose.position.z
return FLU_x, FLU_y, FLU_z
def set_target_position_callback(self, msg):
print("Received New Position Task!")
if msg.header.frame_id == 'base_link':
'''
BODY_FLU
'''
# For Body frame, we will use FLU (Forward, Left and Up)
# +Z +X
# ^ ^
# | /
# |/
# +Y <------body
self.frame = "BODY"
print("body FLU frame")
ENU_X, ENU_Y, ENU_Z = self.FLU2ENU(msg)
ENU_X = ENU_X + self.local_pose.pose.position.x
ENU_Y = ENU_Y + self.local_pose.pose.position.y
ENU_Z = ENU_Z + self.local_pose.pose.position.z
self.cur_target_pose = self.construct_target(ENU_X,
ENU_Y,
ENU_Z,
self.current_heading)
else:
'''
LOCAL_ENU
'''
# For world frame, we will use ENU (EAST, NORTH and UP)
# +Z +Y
# ^ ^
# | /
# |/
# world------> +X
self.frame = "LOCAL_ENU"
print("local ENU frame")
self.cur_target_pose = self.construct_target(msg.pose.position.x,
msg.pose.position.y,
msg.pose.position.z,
self.current_heading)
'''
Receive A Custom Activity
'''
def custom_activity_callback(self, msg):
print("Received Custom Activity:", msg.data)
if msg.data == "LAND":
print("LANDING!")
self.state = "LAND"
self.cur_target_pose = self.construct_target(self.local_pose.pose.position.x,
self.local_pose.pose.position.y,
0.1,
self.current_heading)
if msg.data == "HOVER":
print("HOVERING!")
self.state = "HOVER"
self.hover()
else:
print("Received Custom Activity:", msg.data, "not supported yet!")
def set_target_yaw_callback(self, msg):
print("Received New Yaw Task!")
yaw_deg = msg.data * math.pi / 180.0
self.cur_target_pose = self.construct_target(self.local_pose.pose.position.x,
self.local_pose.pose.position.y,
self.local_pose.pose.position.z,
yaw_deg)
'''
return yaw from current IMU
'''
def q2yaw(self, q):
if isinstance(q, Quaternion):
rotate_z_rad = q.yaw_pitch_roll[0]
else:
q_ = Quaternion(q.w, q.x, q.y, q.z)
rotate_z_rad = q_.yaw_pitch_roll[0]
return rotate_z_rad
def arm(self):
if self.armService(True):
return True
else:
print("Vehicle arming failed!")
return False
def disarm(self):
if self.armService(False):
return True
else:
print("Vehicle disarming failed!")
return False
def offboard(self):
if self.flightModeService(custom_mode='OFFBOARD'):
return True
else:
print("Vechile Offboard failed")
return False
def hover(self):
self.cur_target_pose = self.construct_target(self.local_pose.pose.position.x,
self.local_pose.pose.position.y,
self.local_pose.pose.position.z,
self.current_heading)
def takeoff_detection(self):
if self.local_pose.pose.position.z > 0.1 and self.offboard_state and self.arm_state:
return True
else:
return False
class Commander:
def __init__(self):
rospy.init_node("commander_node")
rate = rospy.Rate(20)
self.position_target_pub = rospy.Publisher('gi/set_pose/position', PoseStamped, queue_size=10)
self.yaw_target_pub = rospy.Publisher('gi/set_pose/orientation', Float32, queue_size=10)
self.custom_activity_pub = rospy.Publisher('gi/set_activity/type', String, queue_size=10)
def move(self, x, y, z, BODY_OFFSET_ENU=True):
self.position_target_pub.publish(self.set_pose(x, y, z, BODY_OFFSET_ENU))
def turn(self, yaw_degree):
self.yaw_target_pub.publish(yaw_degree)
# land at current position
def land(self):
self.custom_activity_pub.publish(String("LAND"))
# hover at current position
def hover(self):
self.custom_activity_pub.publish(String("HOVER"))
# return to home position with defined height
def return_home(self, height):
self.position_target_pub.publish(self.set_pose(0, 0, height, False))
def set_pose(self, x=0, y=0, z=2, BODY_FLU = True):
pose = PoseStamped()
pose.header.stamp = rospy.Time.now()
# ROS uses ENU internally, so we will stick to this convention
if BODY_FLU:
pose.header.frame_id = 'base_link'
else:
pose.header.frame_id = 'map'
pose.pose.position.x = x
pose.pose.position.y = y
pose.pose.position.z = z
return pose
if __name__ == "__main__":
con = Px4Controller()
con.start()
con = Commander()
time.sleep(2)
con.move(1, 0, 0)
time.sleep(2)
con.turn(90)
time.sleep(2)
con.land()
Note: Remember to modify the executable permissions of the python code
2. Operation
- Open PX4 simulation and
enter in the terminal first
cd PX4_Firmware/
Enter again
roslaunch px4 mavros_posix_sitl.launch
- Open the terminal below
catkin_ws/src/offboard_run/scriptsand enter
python px4_mavros_run.py
make the plane take off
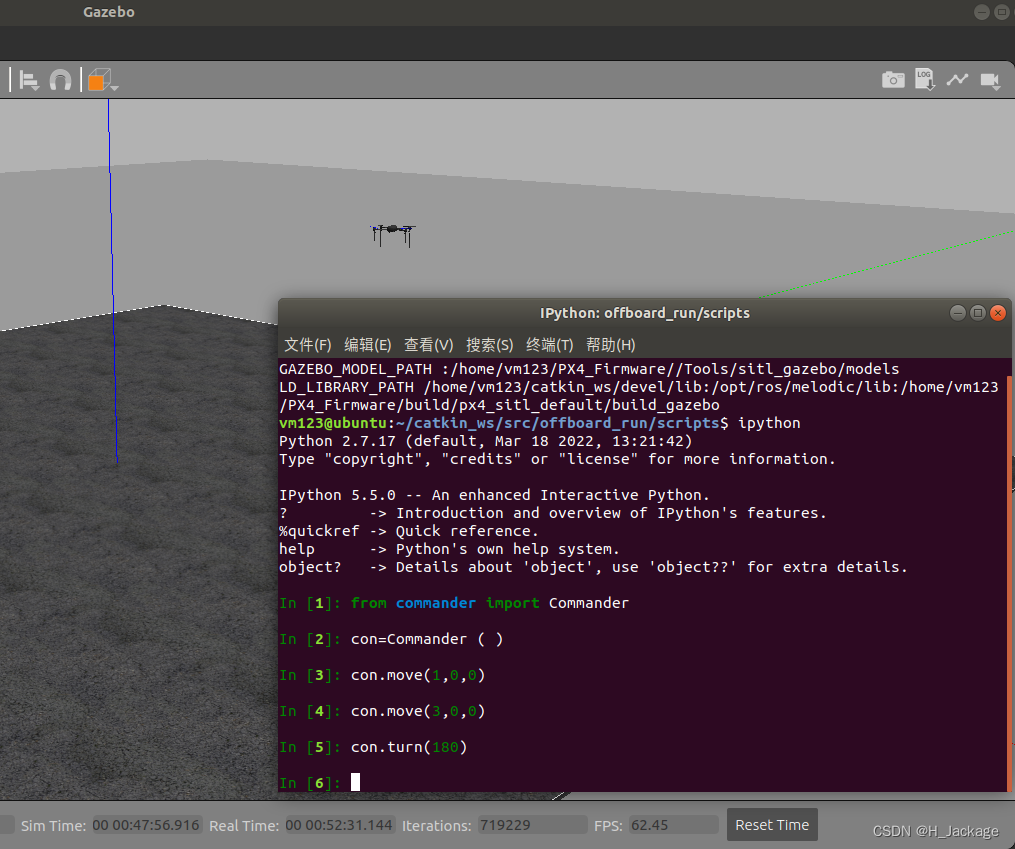
- Go to
catkin_ws/src/offboard_ru/scriptsthe next page and type in the terminal
ipython
- Then enter in sequence
from commander import Commander //输入后回车
con=Commander ( ) //输入后回车
- Then according to the instructions
catkin_ws/src/offboard_run/scriptsinsidecommander.py
, enter the command in the previous step (step 4) to make it fly. For example:
Entercon.move(1,0,0), it will fly 1m north.
Entercon.turn(90), it will turn 90°.