This project is a process from 0 to 1. My first reaction when encountering this kind of project is to check whether there are wheels first. Often things become much simpler when you stand on the shoulders of giants. After various searches, I found that there are very few projects like this website. The only project worthy of reference is Opentcs, and this project has been continuously updated recently, and it still has a high reference value.
What is opentcs?
OpenTCS (Open Transport Control System) is a vendor-independent and flexible control system software for automated guided vehicle systems (AGVS) and other discontinuous conveyors such as electric monorail conveyors and mobile assembly platforms. It was originally developed during a publicly funded project. Today, the code base is maintained and development continues at the Fraunhofer Institute for Material Flow and Logistics (IML) in Dortmund, Germany.
OpenTCS provides the following main functions:
- Autonomous navigation and path planning : OpenTCS supports autonomous navigation and path planning for AGVs, allowing vehicles to move safely through factories, warehouses or other environments, avoiding collisions and obstacles.
- Task management : Users can use OpenTCS to create, assign and manage AGV tasks. These tasks can include operations such as cargo handling, sorting, loading and unloading within the warehouse.
- Equipment Management: OpenTCS allows users to manage and monitor the status and performance of AGVs and other transportation equipment. This helps to detect and resolve equipment failures in a timely manner.
- Flexibility : OpenTCS is a highly configurable and scalable system that can be customized to the needs of specific applications. It also provides a plug-in system that allows users to add custom functionality.
- User Interface : OpenTCS provides a user-friendly graphical user interface that enables operators to easily monitor and control AGVs and tasks.
- Integration : OpenTCS can be integrated with other factory automation systems such as warehouse management systems (WMS) and production planning systems (MES) to enable coordinated workflows.
Official website address: https://www.opentcs.org/en/download.html
Source code address:
Current version 5.9
https://github.com/openTCS/opentcs
For the consistency of the following operations, version 5.9 is cloned here, the address is as follows:
https://github.com/hai411741962/opentcs
After the source code is downloaded, you need gradle to download the dependency package. If you need to install it, please click here to install gradle .
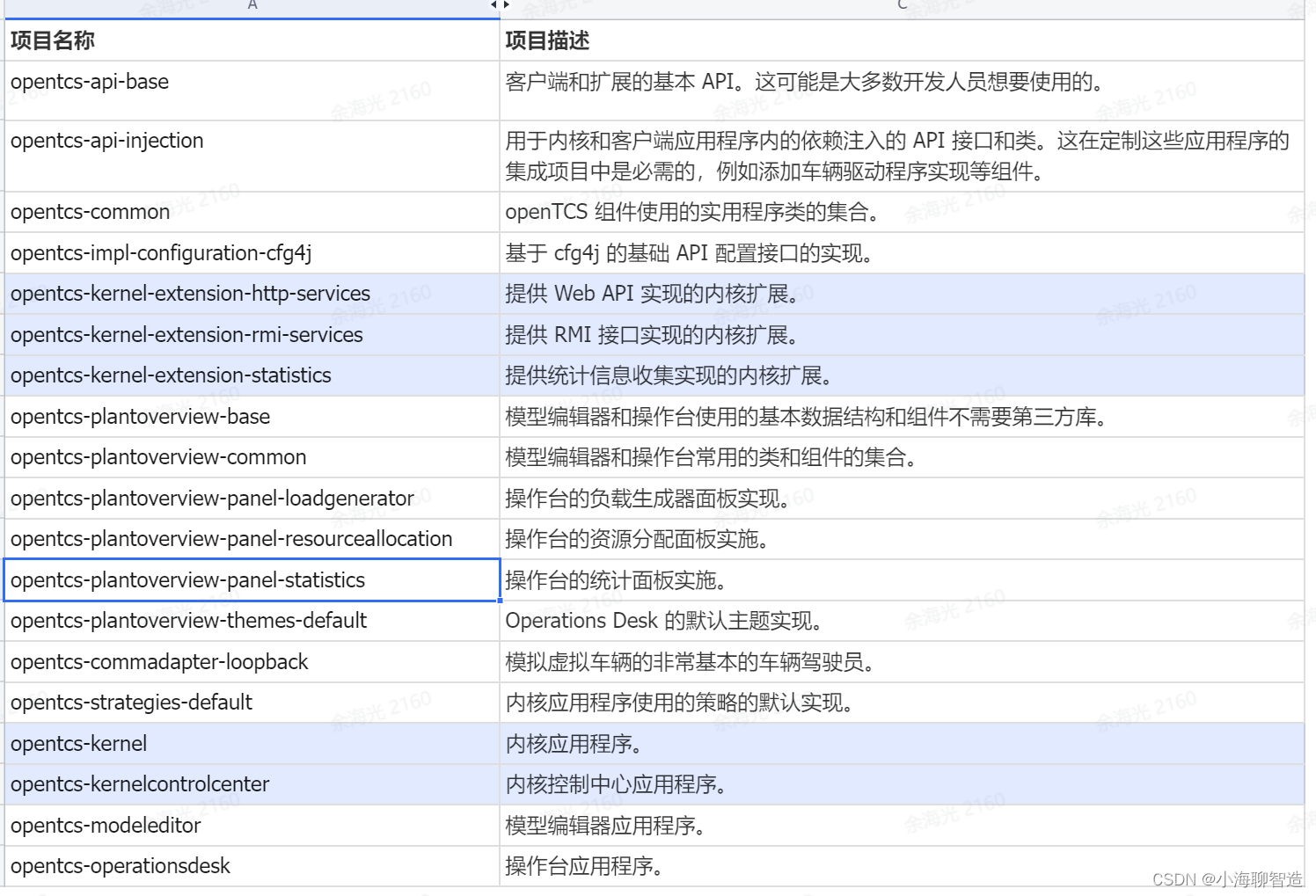
After downloading the idea and importing it, the project directory is as follows:
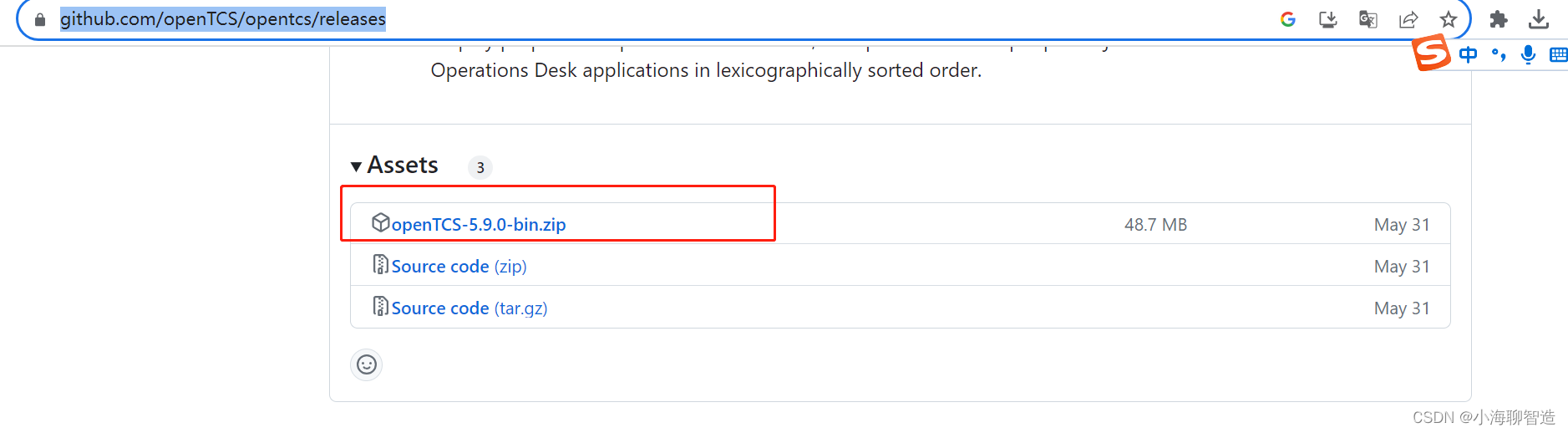
If you just want to experience it, you can download the compiled package directly.
Download address: https://github.com/openTCS/opentcs/releases
The directory after decompression is as follows
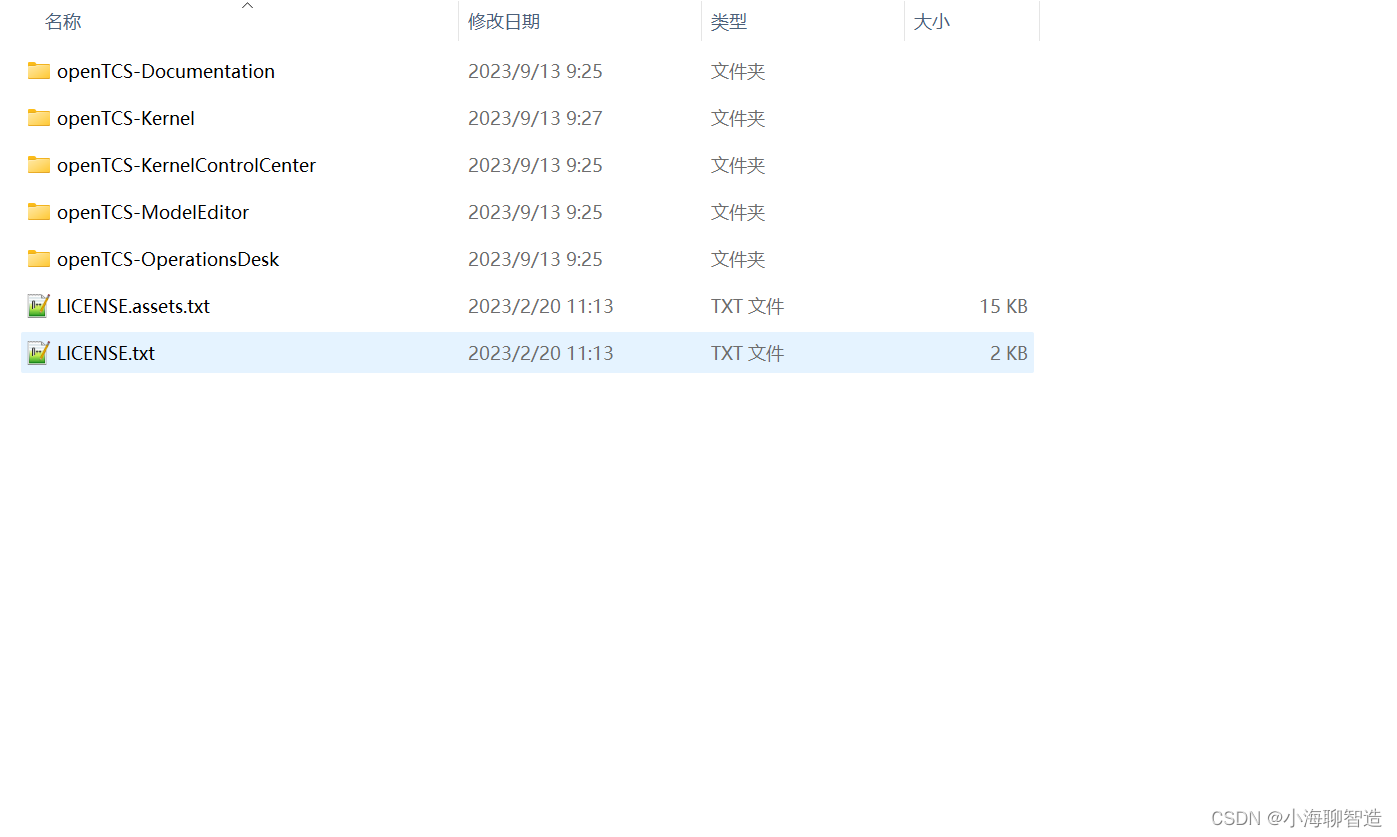
The first one is the document, followed by the Kennel monitoring center, monitoring intermediate controller, map editor, and running desktop controller. The basic environment is now ready. Later we will experience the various processes of this software!