Deep Learning (28) - YOLO Series (7)
咱就是说,需要源码请造访:Jane的GitHub: Here
I haven't finished writing in the morning, and I will continue in the afternoon, which is a small tail. In fact, I finished writing the key parts of the training and the key parts of the data in the morning. Now I will write the reasoning part.
In order to improve the efficiency of the reasoning process, the speed is faster:
detect the whole process
1.1 attempt_load(weights)
- weights is the weight trained before loading yolov7
- There is still BN after the first load, and there is no merger
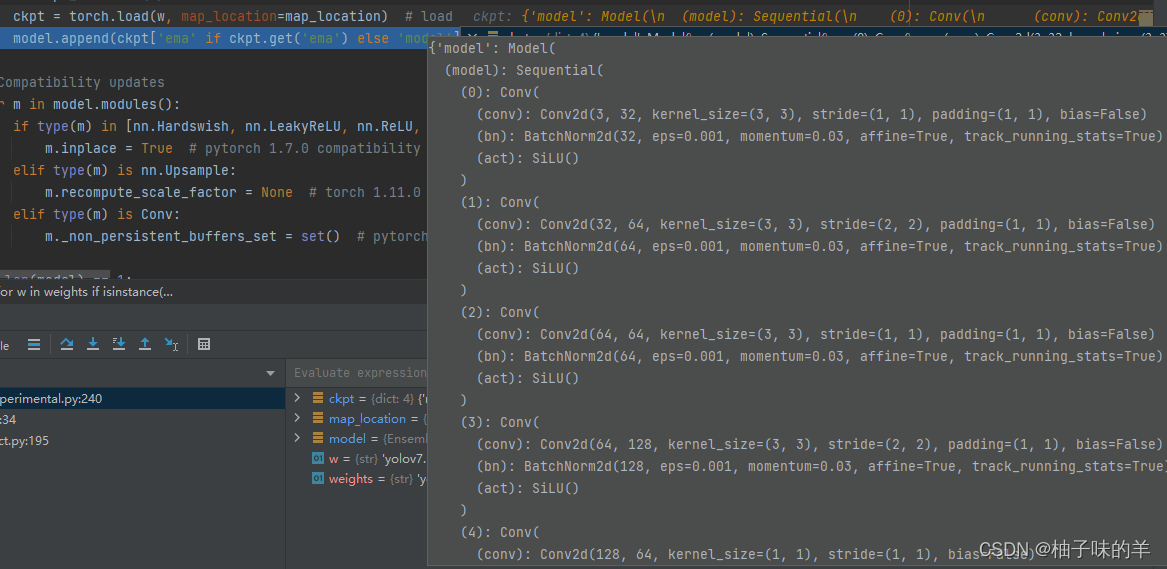
- The key is in the following fuse()
1.2 model.fuse()

# 很隐蔽,刚开始我没想到接口是在这里的
def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
print('Fusing layers... ')
for m in self.model.modules():
if isinstance(m, RepConv):
#print(f" fuse_repvgg_block")
m.fuse_repvgg_block()
elif isinstance(m, RepConv_OREPA):
#print(f" switch_to_deploy")
m.switch_to_deploy()
elif type(m) is Conv and hasattr(m, 'bn'):
m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
delattr(m, 'bn') # remove batchnorm
m.forward = m.fuseforward # update forward
elif isinstance(m, (IDetect, IAuxDetect)):
m.fuse()
m.forward = m.fuseforward
self.info()
return self
When encountering conv, there must be a BN, so

1.3 fuse_conv_and_bn(conv,bn)
- First define a new conv [the inputsize, outputsize and kernel are the same as the original input]
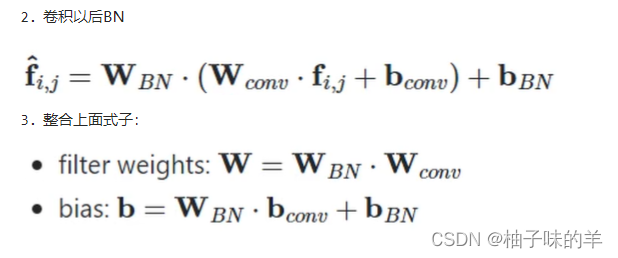
- First get w_conv:
w_conv = conv.weight.clone().view(conv.out_channels, -1) - Get w_bn:
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))【bn.weight 就是以下公式中的gamma,sigma平方是方差bn.running_var】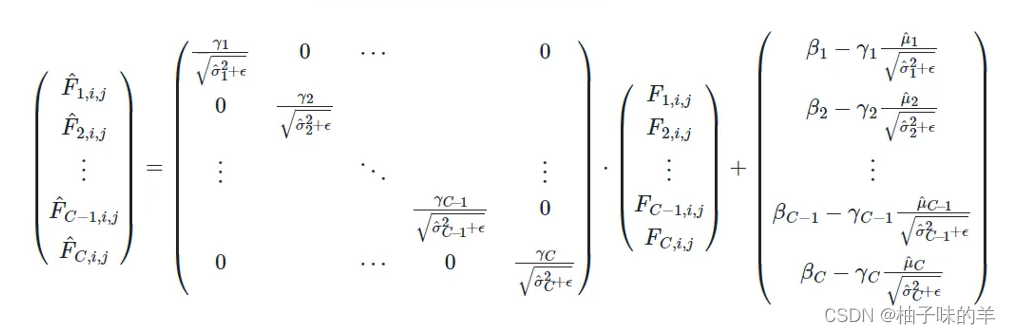
- get w_fuse:
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape)) - Get b_conv, because we set the bias to 0 during the learning process, so:
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias - Get b_bn:
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))[bn.bias is β in the above formula, μ is the mean value bn.running_mean] - Calculate b_fuse
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
def fuse_conv_and_bn(conv, bn):
# Fuse convolution and batchnorm layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/
fusedconv = nn.Conv2d(conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
groups=conv.groups,
bias=True).requires_grad_(False).to(conv.weight.device)
# prepare filters bn.weight 对应论文中的gamma bn.bias对应论文中的beta bn.running_mean则是对于当前batch size的数据所统计出来的平均值 bn.running_var是对于当前batch size的数据所统计出来的方差
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
# prepare spatial bias
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
return fusedconv
1.4 Repvgg_block
Combine convolution and BN in Repvgg
- The original block↓
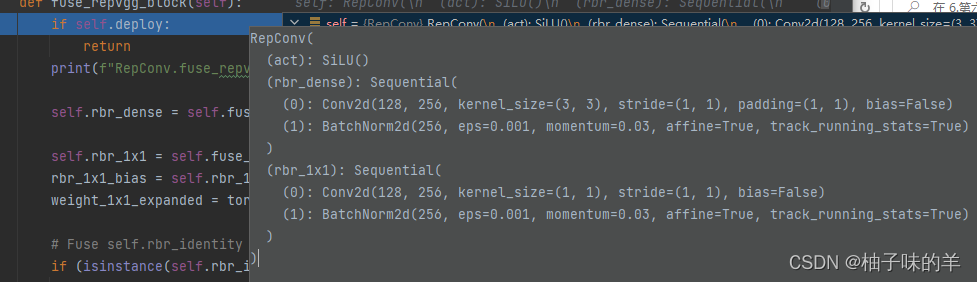
- After fusing rbr_dense:

- After fusing rbr_1*1:

1.5 Convolve 1* 1 padding into 3* 3

After padding

, everything is changed: the model looks like this ——>
OK, it’s really gone this time, 886~~~~