Preparation content:
+ A 10*7 checkerboard (the spacing of the checkerboard is 24.0mm) if it is not changed in the code
+ Load all the jpg images under the pic folder, the directory where more than a dozen chessboard pictures were taken./photo/*.jpg
+ Camera program and calibration program (camera size should be set to be the same) Here we take 3840*2160 as an example
Camera program: (press J key to take a picture)
import cv2
camera=cv2.VideoCapture(0)
cv2.namedWindow('imgage', cv2.WINDOW_FREERATIO)
i = 0
flag=camera.isOpened()
camera.set(3,3840)
camera.set(4,2160)
camera.set(6,cv2.VideoWriter.fourcc(*'MJPG'))
print("L:{}".format(camera.get(3)),"H:{}".format(camera.get(4)),
"FPS:{}".format(camera.get(cv2.CAP_PROP_FPS)))
print(camera.get(cv2.CAP_PROP_FOCUS))
while flag:
(grabbed, img) = camera.read()
cv2.imshow('imgage', img)
if cv2.waitKey(1) & 0xFF == ord('j'): # 按j保存一张图片
i += 1
u = str(i)
firename=str('./photo/'+u+'.jpg')
cv2.imwrite(firename, img)
print('写入:',firename)
if cv2.waitKey(1) & 0xFF == ord('q'):
breakSeveral photos will be generated under the ./photo/ folder
Calibration procedure:
import cv2
import numpy as np
import glob
import yaml
# 找棋盘格角点
# 设置寻找亚像素角点的参数,采用的停止准则是最大循环次数30和最大误差容限0.001
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # 阈值
#棋盘格模板规格
w = 9 # 10 - 1
h = 6 # 7 - 1
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
objp = objp*24.4 # 18.1 mm
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
#加载pic文件夹下所有的jpg图像
images = glob.glob('./photo/*.jpg') # 拍摄的十几张棋盘图片所在目录
i=0
for fname in images:
img = cv2.imread(fname)
# 获取画面中心点
#获取图像的长宽
h1, w1 = img.shape[0], img.shape[1]
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
u, v = img.shape[:2]
# 找到棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
# 如果找到足够点对,将其存储起来
if ret == True:
print("i:", i)
i = i+1
# 在原角点的基础上寻找亚像素角点
cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
#追加进入世界三维点和平面二维点中
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w,h), corners, ret)
cv2.namedWindow('findCorners', cv2.WINDOW_NORMAL)
cv2.resizeWindow('findCorners', 640, 480)
cv2.imshow('findCorners',img)
cv2.waitKey(200)
cv2.destroyAllWindows()
#%% 标定
print('正在计算')
print(u,v)
#标定
ret, mtx, dist, rvecs, tvecs = \
cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
#写入文件
###写入文件路径###
file_path=("./标定文件.yaml")
###写入文件路径###
#存取标定数据
mtx_yaml=mtx.tolist()
dist_yaml=dist.tolist()
camera_u,camera_v=u,v
data={"information":"Camera calibration parameters","camera_matrix":mtx_yaml,"dist_coeff":dist_yaml,"camera_u":camera_u,"camera_v":camera_v}
with open(file_path,"w") as file:
yaml.dump(data,file)
print("ret:",ret )
print("mtx:\n",mtx) # 内参数矩阵
print("dist畸变值:\n",dist ) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
print("rvecs旋转(向量)外参:\n",rvecs) # 旋转向量 # 外参数
print("tvecs平移(向量)外参:\n",tvecs ) # 平移向量 # 外参数
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (u, v), 0, (u, v))
print('newcameramtx外参',newcameramtx)
print("写入文件名称:",file_path)
# #打开摄像机
# camera=cv2.VideoCapture(0)
# camera.set(3,3840)
# camera.set(4,2160)
# camera.set(6,cv2.VideoWriter.fourcc(*'MJPG'))
# print("L:{}".format(camera.get(3)),"H:{}".format(camera.get(4)),
# "FPS:{}".format(camera.get(cv2.CAP_PROP_FPS)))
# cv2.namedWindow('imgage', cv2.WINDOW_FREERATIO)
# while True:
# (grabbed,frame)=camera.read()
# h1, w1 = frame.shape[:2]
# newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (u, v), 0, (u, v))
# # 纠正畸变
# dst1 = cv2.undistort(frame, mtx, dist, None, newcameramtx)
# #dst2 = cv2.undistort(frame, mtx, dist, None, newcameramtx)
# mapx,mapy=cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w1,h1),5)
# dst2=cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
# # 裁剪图像,输出纠正畸变以后的图片
# x, y, w1, h1 = roi
# dst1 = dst1[y:y + h1, x:x + w1]
#
# #cv2.imshow('frame',dst2)
# #cv2.imshow('dst1',dst1)
# cv2.imshow('imgage', dst2)
# if cv2.waitKey(1) & 0xFF == ord('q'): # 按q保存一张图片
# cv2.imwrite("../u4/frame.jpg", dst1)
# break
#
# camera.release()
# cv2.destroyAllWindows()
Calibration files are stored as .yaml files
Load the yaml program
import cv2
import numpy as np
import os
import yaml
#打开摄像头
cap =cv2.VideoCapture(0)
font = cv2.FONT_HERSHEY_SIMPLEX # font for displaying text (below)
flag = cap.isOpened()
cap.set(3, 3840)
cap.set(4, 2160)
cap.set(6, cv2.VideoWriter.fourcc(*'MJPG'))
cv2.namedWindow('frame', cv2.WINDOW_FREERATIO)
cv2.namedWindow('frame1', cv2.WINDOW_FREERATIO)
###加载标定参数yaml
###加载文件路径###
file_path = ("./4k标定参数.yaml")
###加载文件路径###
with open(file_path, "r") as file:
parameter = yaml.load(file.read(), Loader=yaml.Loader)
mtx = parameter['camera_matrix']
dist = parameter['dist_coeff']
camera_u = parameter['camera_u']
camera_v = parameter['camera_v']
mtx = np.array(mtx)
dist = np.array(dist)
i=0
while 1:
(grabbed, frame) = cap.read()
h1, w1 = frame.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (h1, w1), 0, (h1, w1))
dst1 = cv2.undistort(frame, mtx, dist, None, newcameramtx)
x, y, w1, h1 = roi
dst1 = dst1[y:y + h1, x:x + w1]
frame1 = dst1
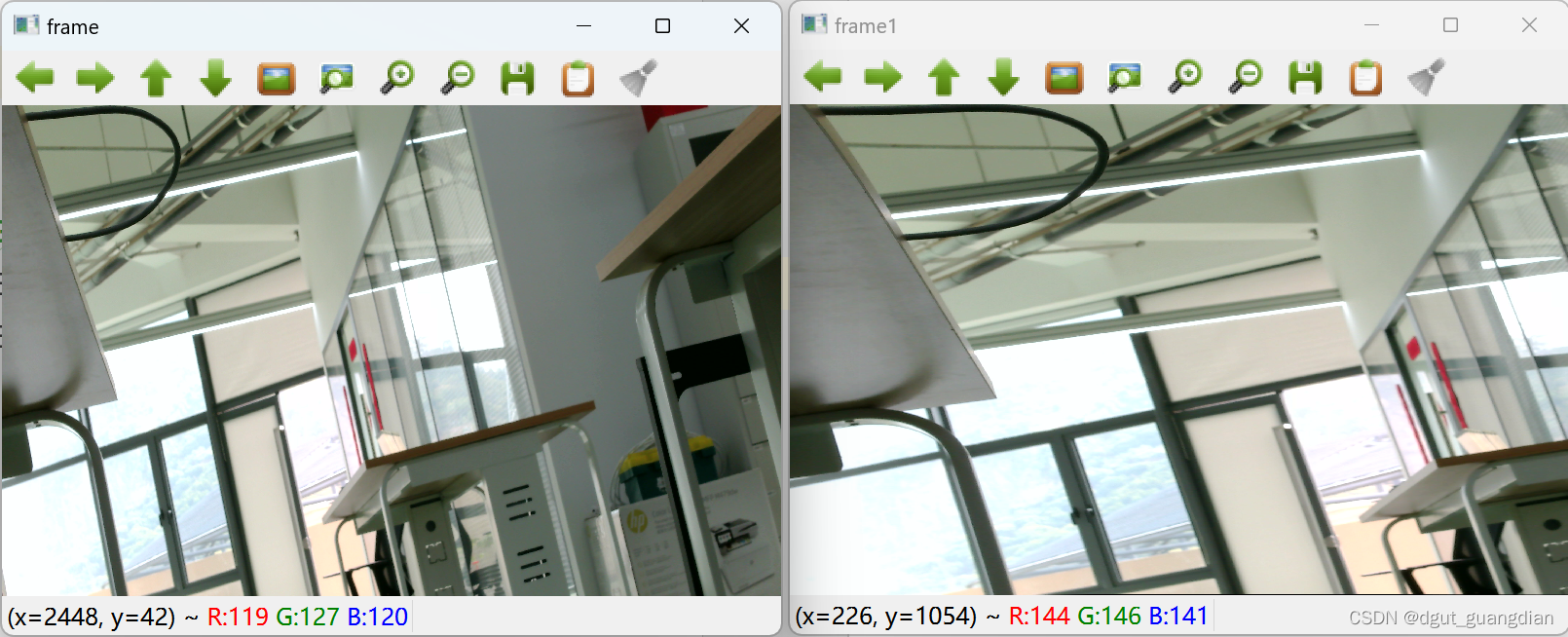
cv2.imshow('frame',frame)
cv2.imshow('frame1',frame1)
if cv2.waitKey(1) & 0xFF == ord('j'): # 按j保存一张图片
i += 1
u = str(i)
firename=str('./photo/img'+u+'.jpg')
cv2.imwrite(firename, img)
print('写入:',firename)
if cv2.waitKey(1) & 0xFF == ord('q'):
breakframe is the original image, frame1 is the corrected image