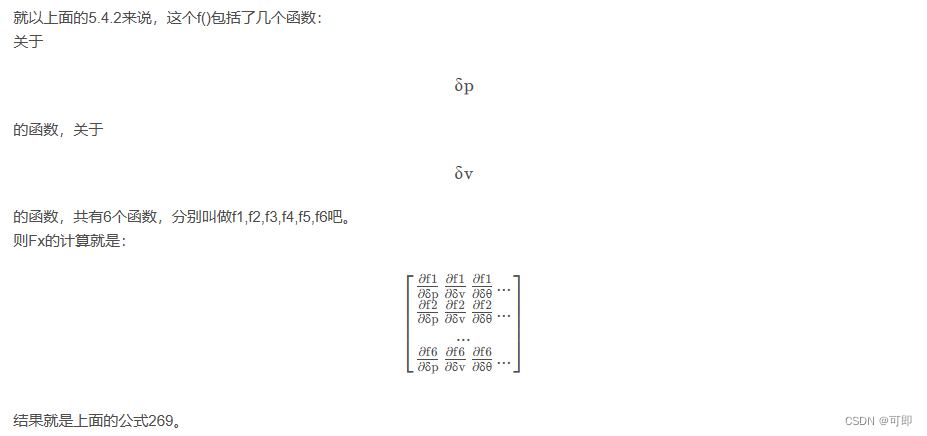
illustrate
1. The theoretical part of this article refers to the article https://zhuanlan.zhihu.com/p/152662055 and https://blog.csdn.net/brightming/article/details/118057262
The practical reference under ROS https://blog.csdn.net/qinqinxiansheng/article/details/107108475 and https://zhuanlan.zhihu.com /p /163038275
theory
Coordinate system

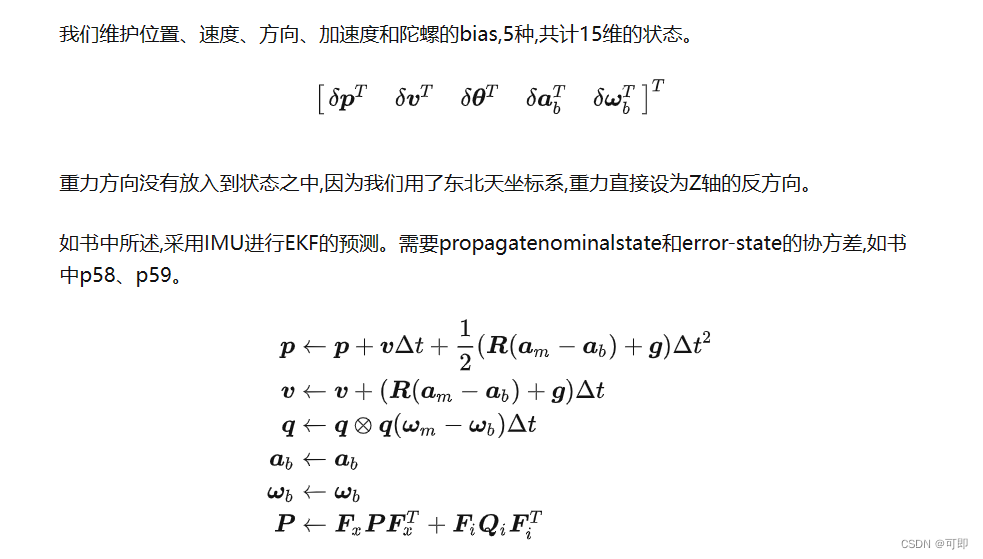
error-state
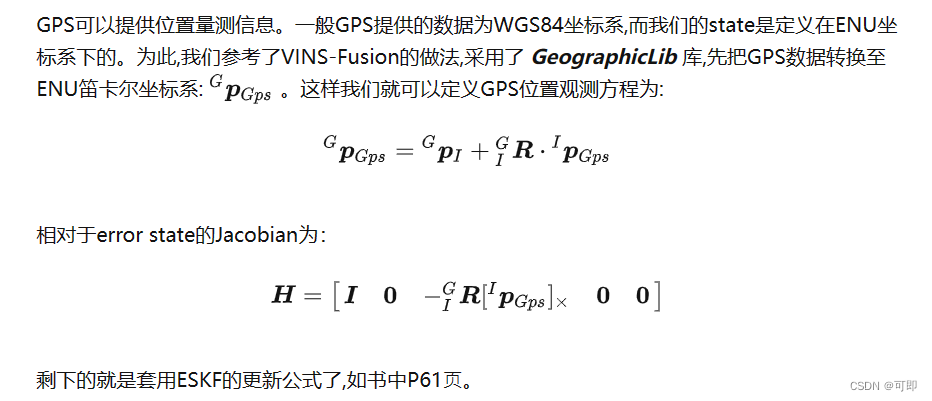
ESKF GPS update
initialization
The initial position is 0, the direction roll and pitch can be determined by the gravity direction of the acceleration, and the bias is set to 0.
the code
Please refer to github for the code: https://github.com/ydsf16/imu_gps_localization
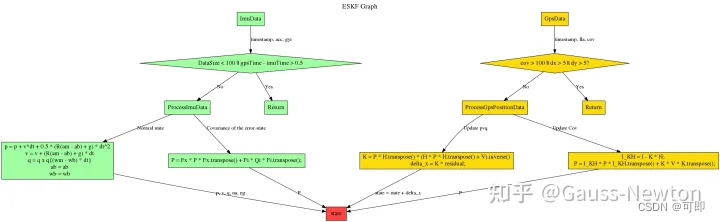
The overall process is as follows: receive IMU data, integrate, update the system equation, receive GPS data, calculate K, and update the state quantity
Description of the overall framework of the code
The specific structural framework of the code is shown in the figure below:

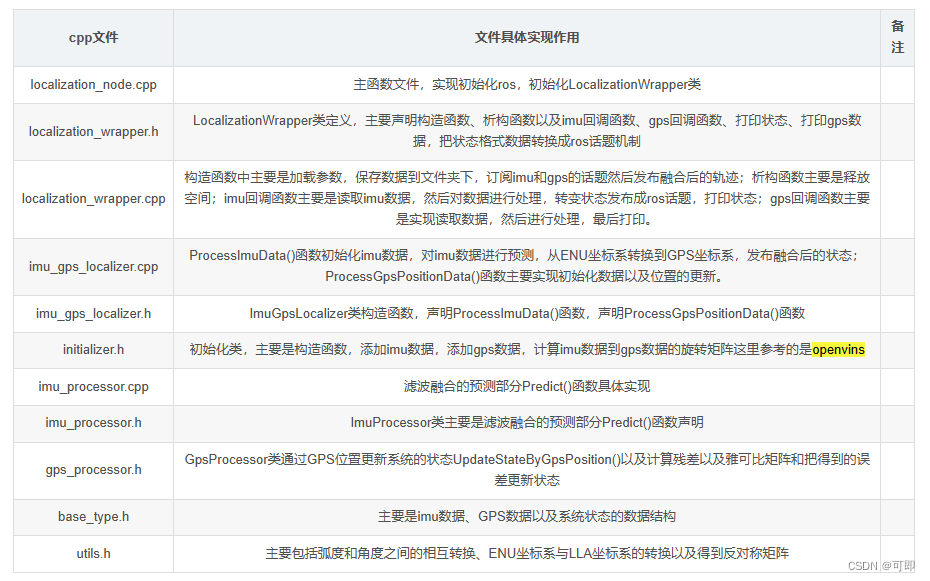
Introduction of main functions
1) State definition:
struct State {
double timestamp;
Eigen::Vector3d lla; // WGS84 position.
Eigen::Vector3d G_p_I; // The original point of the IMU frame in the Global frame.
Eigen::Vector3d G_v_I; // The velocity original point of the IMU frame in the Global frame.
Eigen::Matrix3d G_R_I; // The rotation from the IMU frame to the Global frame.
Eigen::Vector3d acc_bias; // The bias of the acceleration sensor.
Eigen::Vector3d gyro_bias; // The bias of the gyroscope sensor.
// Covariance.
Eigen::Matrix<double, 15, 15> cov;
// The imu data.
ImuDataPtr imu_data_ptr;
};
Include:
Eigen::Vector3d G_p_I; // The original point of the IMU frame in the Global frame.
Eigen::Vector3d G_v_I; // The velocity original point of the IMU frame in the Global frame.
Eigen::Matrix3d G_R_I; // The rotation from the IMU frame to the Global frame.
Eigen::Vector3d acc_bias; // The bias of the acceleration sensor.
Eigen::Vector3d gyro_bias; // The bias of the gyroscope sensor.
For the five state quantities, when the covariance is expressed, the rotation is also expressed by the three-dimensional rotation angle, so the covariance matrix is 15.
2) LocalizationWrapper constructor
The LocalizationWrapper constructor mainly implements loading parameters, adding data storage locations, subscribing to topics and publishing topics
LocalizationWrapper::LocalizationWrapper(ros::NodeHandle& nh) {
// Load configs.
double acc_noise, gyro_noise, acc_bias_noise, gyro_bias_noise;
nh.param("acc_noise", acc_noise, 1e-2);
nh.param("gyro_noise", gyro_noise, 1e-4);
nh.param("acc_bias_noise", acc_bias_noise, 1e-6);
nh.param("gyro_bias_noise", gyro_bias_noise, 1e-8);
double x, y, z;
nh.param("I_p_Gps_x", x, 0.);
nh.param("I_p_Gps_y", y, 0.);
nh.param("I_p_Gps_z", z, 0.);
const Eigen::Vector3d I_p_Gps(x, y, z);
std::string log_folder
= "/home/sunshine/catkin_imu_gps_localization/src/imu_gps_localization";
ros::param::get("log_folder", log_folder);
// Log.
file_state_.open(log_folder + "/state.csv");
file_gps_.open(log_folder +"/gps.csv");
// Initialization imu gps localizer.
imu_gps_localizer_ptr_ =
std::make_unique<ImuGpsLocalization::ImuGpsLocalizer>(acc_noise, gyro_noise,
acc_bias_noise, gyro_bias_noise,
I_p_Gps);
// Subscribe topics.
imu_sub_ = nh.subscribe("/imu/data", 10, &LocalizationWrapper::ImuCallback, this);
//TODO 运行数据集需要修改的地方: gps的话题为/fix
gps_position_sub_ = nh.subscribe("/fix", 10, &LocalizationWrapper::GpsPositionCallback, this);
//发布融合后的轨迹
state_pub_ = nh.advertise<nav_msgs::Path>("fused_path", 10);
}
3) Filtering algorithm for prediction
void ImuProcessor::Predict(const ImuDataPtr last_imu, const ImuDataPtr cur_imu, State* state) {
// Time.
const double delta_t = cur_imu->timestamp - last_imu->timestamp;
const double delta_t2 = delta_t * delta_t;
// Set last state.
State last_state = *state;
// mid_point integration methods
// Acc and gyro.
const Eigen::Vector3d acc_unbias = 0.5 * (last_imu->acc + cur_imu->acc) - last_state.acc_bias;
const Eigen::Vector3d gyro_unbias = 0.5 * (last_imu->gyro + cur_imu->gyro) - last_state.gyro_bias;
// Normal state.
// Using P58. of "Quaternion kinematics for the error-state Kalman Filter".
state->G_p_I = last_state.G_p_I + last_state.G_v_I * delta_t +
0.5 * (last_state.G_R_I * acc_unbias + gravity_) * delta_t2;
state->G_v_I = last_state.G_v_I + (last_state.G_R_I * acc_unbias + gravity_) * delta_t;
const Eigen::Vector3d delta_angle_axis = gyro_unbias * delta_t;
if (delta_angle_axis.norm() > 1e-12) {
// std::cout << "norm" << delta_angle_axis.norm() << "normlized"
// << delta_angle_axis.normalized() << std::endl;
state->G_R_I = last_state.G_R_I
* Eigen::AngleAxisd(delta_angle_axis.norm(),
delta_angle_axis.normalized())
.toRotationMatrix();
}
// Error-state. Not needed.
// Covariance of the error-state.
Eigen::Matrix<double, 15, 15> Fx = Eigen::Matrix<double, 15, 15>::Identity();
Fx.block<3, 3>(0, 3) = Eigen::Matrix3d::Identity() * delta_t;
Fx.block<3, 3>(3, 6) = - state->G_R_I * GetSkewMatrix(acc_unbias) * delta_t;
Fx.block<3, 3>(3, 9) = - state->G_R_I * delta_t;
if (delta_angle_axis.norm() > 1e-12) {
Fx.block<3, 3>(6, 6) = Eigen::AngleAxisd(delta_angle_axis.norm(), delta_angle_axis.normalized()).toRotationMatrix().transpose();
} else {
Fx.block<3, 3>(6, 6).setIdentity();
}
Fx.block<3, 3>(6, 12) = - Eigen::Matrix3d::Identity() * delta_t;
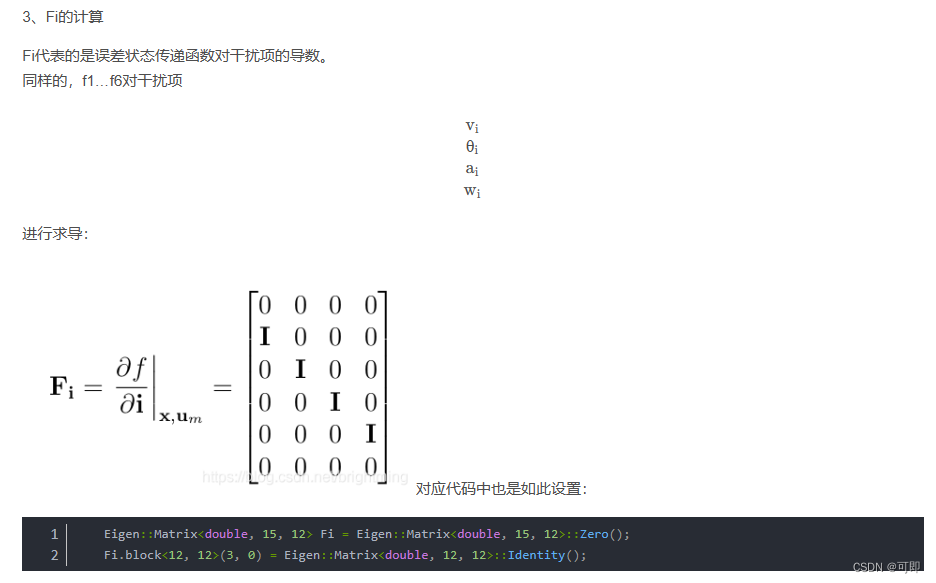
Eigen::Matrix<double, 15, 12> Fi = Eigen::Matrix<double, 15, 12>::Zero();
Fi.block<12, 12>(3, 0) = Eigen::Matrix<double, 12, 12>::Identity();
Eigen::Matrix<double, 12, 12> Qi = Eigen::Matrix<double, 12, 12>::Zero();
Qi.block<3, 3>(0, 0) = delta_t2 * acc_noise_ * Eigen::Matrix3d::Identity();
Qi.block<3, 3>(3, 3) = delta_t2 * gyro_noise_ * Eigen::Matrix3d::Identity();
Qi.block<3, 3>(6, 6) = delta_t * acc_bias_noise_ * Eigen::Matrix3d::Identity();
Qi.block<3, 3>(9, 9) = delta_t * gyro_bias_noise_ * Eigen::Matrix3d::Identity();
//协方差预测
state->cov = Fx * last_state.cov * Fx.transpose() + Fi * Qi * Fi.transpose();
// Time and imu.
state->timestamp = cur_imu->timestamp;
state->imu_data_ptr = cur_imu;
}
The predict is mainly the kinematic estimation of the nominal state and the recursion of the covariance (in order to calculate the K value by combining the covariance of the two when the observed value comes).
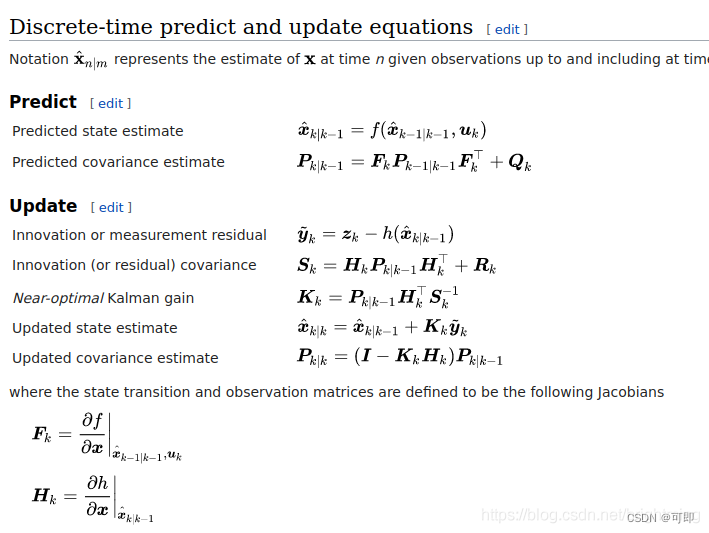
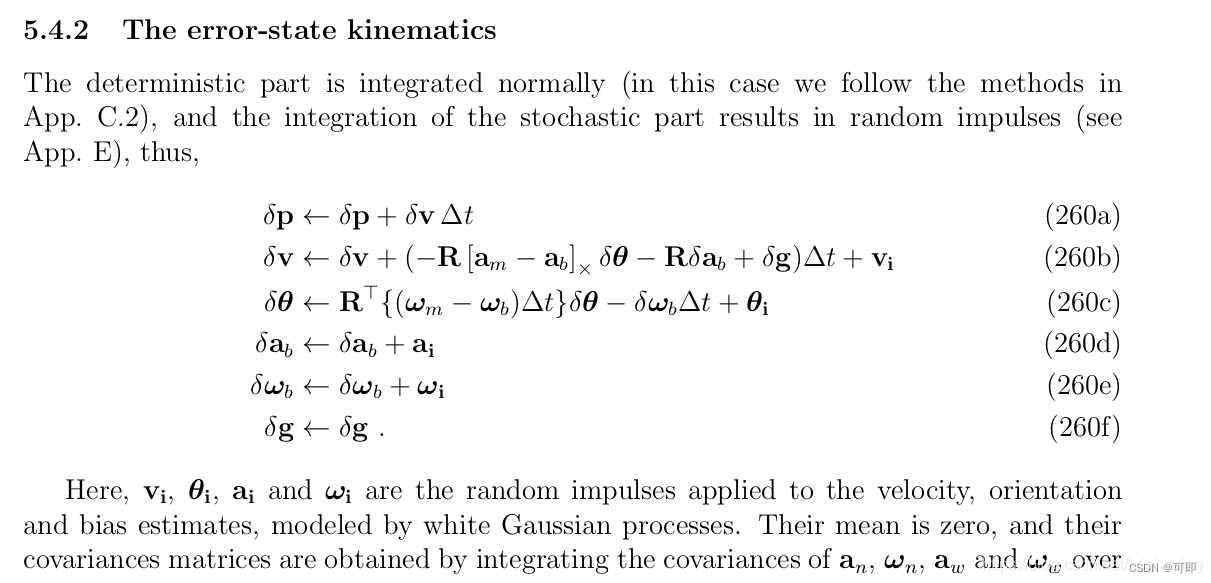
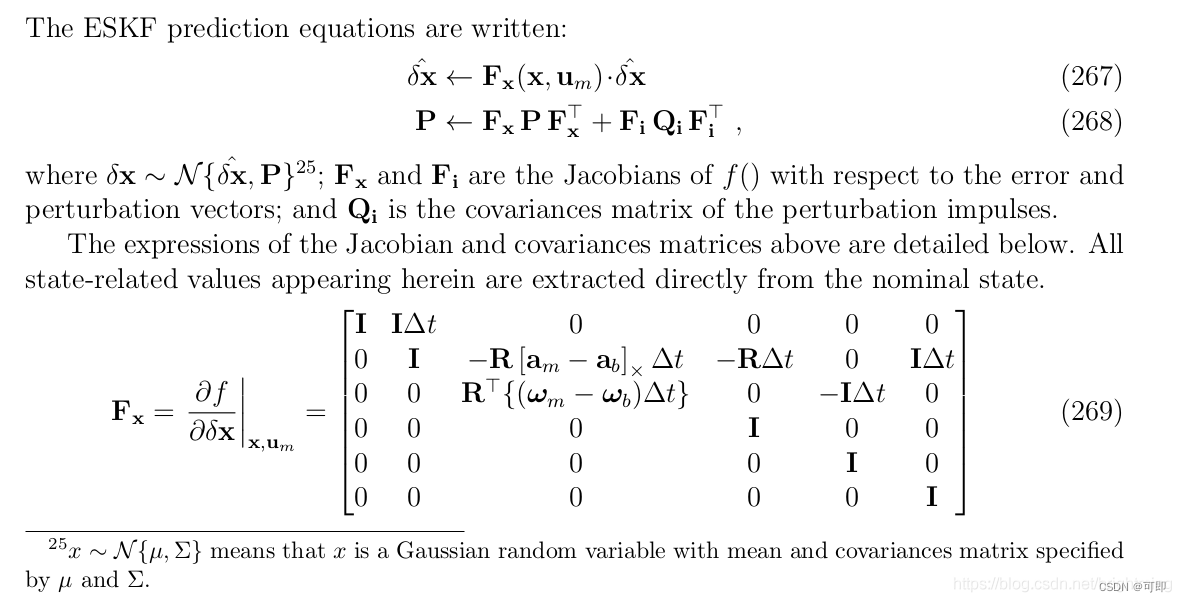
The calculation of Fx transmitted by covariance is consistent with that in "Quaternion Kinematics for the error-state KF": (The transmission of error is the same as the
transmission of nominal state, and follows the same kinematics model, but the error will continue to include various new motion errors on the basis of the previous values, such as the bias of imu, random walk, etc., while nominal will recurse according to the normal kinematics model regardless of these values.)
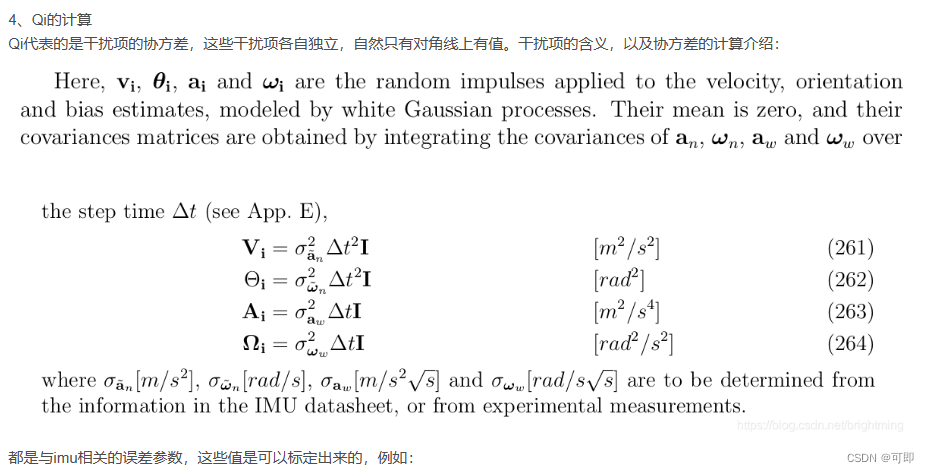
accelerometer_noise_density: 0.012576 #continous
accelerometer_random_walk: 0.000232
gyroscope_noise_density: 0.0012615 #continous
gyroscope_random_walk: 0.0000075
The code is set like this:
Eigen::Matrix<double, 12, 12> Qi = Eigen::Matrix<double, 12, 12>::Zero();
Qi.block<3, 3>(0, 0) = delta_t2 * acc_noise_ * Eigen::Matrix3d::Identity();
Qi.block<3, 3>(3, 3) = delta_t2 * gyro_noise_ * Eigen::Matrix3d::Identity();
Qi.block<3, 3>(6, 6) = delta_t * acc_bias_noise_ * Eigen::Matrix3d::Identity();
Qi.block<3, 3>(9, 9) = delta_t * gyro_bias_noise_ * Eigen::Matrix3d::Identity();
These parameters are set during initialization in the code:
LocalizationWrapper::LocalizationWrapper(ros::NodeHandle& nh) {
// Load configs.
double acc_noise, gyro_noise, acc_bias_noise, gyro_bias_noise;
nh.param("acc_noise", acc_noise, 1e-2);
nh.param("gyro_noise", gyro_noise, 1e-4);
nh.param("acc_bias_noise", acc_bias_noise, 1e-6);
nh.param("gyro_bias_noise", gyro_bias_noise, 1e-8);
<launch>
<param name="acc_noise" type="double" value="1e-2" />
<param name="gyro_noise" type="double" value="1e-4" />
<param name="acc_bias_noise" type="double" value="1e-6" />
<param name="gyro_bias_noise" type="double" value="1e-8" />
<param name="I_p_Gps_x" type="double" value="0.0" />
<param name="I_p_Gps_y" type="double" value="0.0" />
<param name="I_p_Gps_z" type="double" value="0.0" />
<param name="log_folder" type="string" value="$(find imu_gps_localization)" />
<node name="nmea_topic_driver" pkg="nmea_navsat_driver" type="nmea_topic_driver" output="screen" />
<node name="imu_gps_localization_node" pkg="imu_gps_localization" type="imu_gps_localization_node" output="screen" />
<node pkg="rviz" type="rviz" name="rviz" output="screen"
args="-d $(find imu_gps_localization)/ros_wrapper/rviz/default.rviz" required="true">
</node>
</launch>
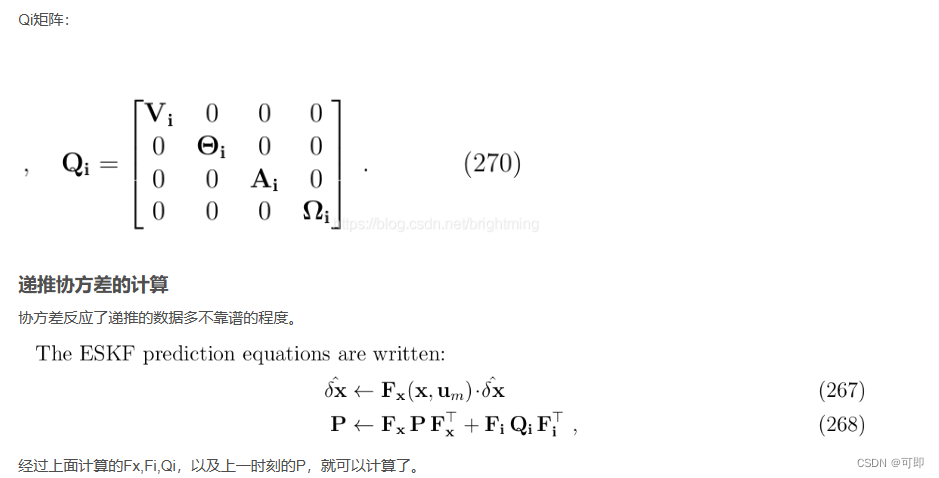
In the code:
state->cov = Fx * last_state.cov * Fx.transpose() + Fi * Qi * Fi.transpose();
That is, the following code implementation:
void GpsProcessor::ComputeJacobianAndResidual(const Eigen::Vector3d& init_lla,
const GpsPositionDataPtr gps_data,
const State& state,
Eigen::Matrix<double, 3, 15>* jacobian,
Eigen::Vector3d* residual) {
const Eigen::Vector3d& G_p_I = state.G_p_I;
const Eigen::Matrix3d& G_R_I = state.G_R_I;
// Convert wgs84 to ENU frame.
Eigen::Vector3d G_p_Gps;//测量值
ConvertLLAToENU(init_lla, gps_data->lla, &G_p_Gps);
// Compute residual.
//I_p_Gps_在imu坐标系下的位移?是固定值?
//G_p_I + G_R_I * I_p_Gps_预测的状态计算出来的坐标点
*residual = G_p_Gps - (G_p_I + G_R_I * I_p_Gps_);
// Compute jacobian.
jacobian->setZero();
jacobian->block<3, 3>(0, 0) = Eigen::Matrix3d::Identity();
jacobian->block<3, 3>(0, 6) = - G_R_I * GetSkewMatrix(I_p_Gps_);
}

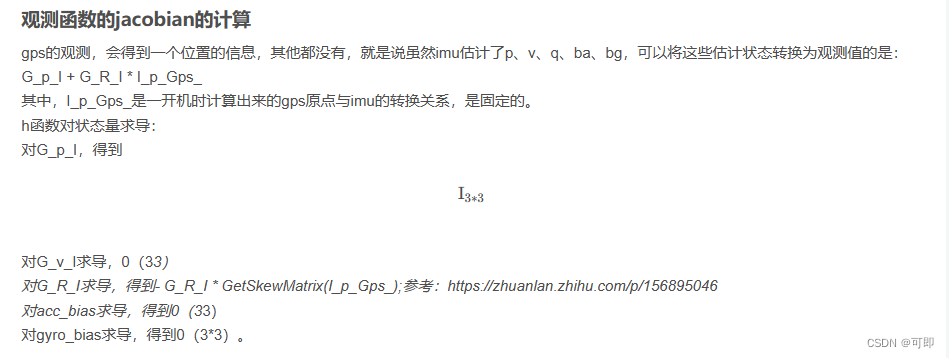
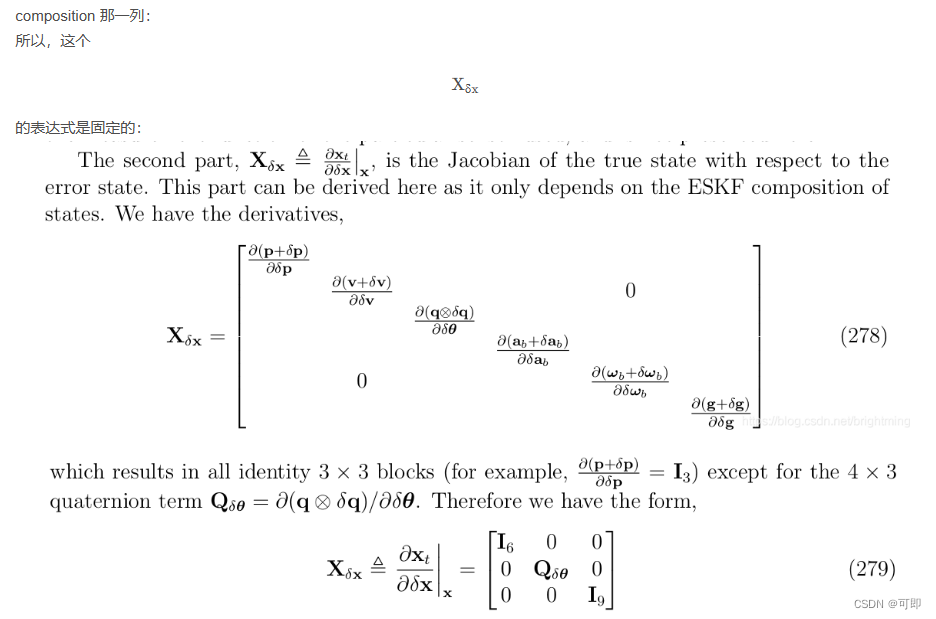
The second item is actually the derivation of the true value to the error item, see the following table:

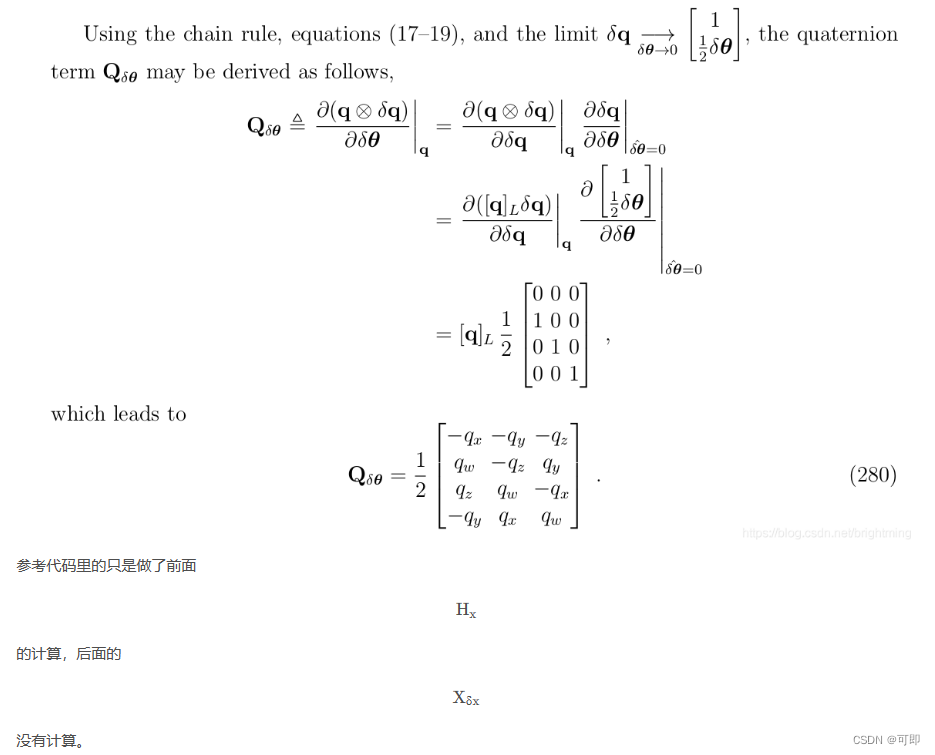
// Compute jacobian.
jacobian->setZero();
jacobian->block<3, 3>(0, 0) = Eigen::Matrix3d::Identity();
jacobian->block<3, 3>(0, 6) = - G_R_I * GetSkewMatrix(I_p_Gps_);
Update the status of the system with GPS position measurement data
bool GpsProcessor::UpdateStateByGpsPosition(const Eigen::Vector3d& init_lla, const GpsPositionDataPtr gps_data_ptr, State* state) {
Eigen::Matrix<double, 3, 15> H;
Eigen::Vector3d residual;
ComputeJacobianAndResidual(init_lla, gps_data_ptr, *state, &H, &residual);
const Eigen::Matrix3d& V = gps_data_ptr->cov;
// EKF.
const Eigen::MatrixXd& P = state->cov;
//P:状态的协方差矩阵;V:gps数据对误差量的协方差矩阵;H:观测数据(gps数据)对误差状态的雅可比矩阵
const Eigen::MatrixXd K = P * H.transpose() * (H * P * H.transpose() + V).inverse();
const Eigen::VectorXd delta_x = K * residual;
// Add delta_x to state.
AddDeltaToState(delta_x, state);
// Covarance.
const Eigen::MatrixXd I_KH = Eigen::Matrix<double, 15, 15>::Identity() - K * H;
state->cov = I_KH * P * I_KH.transpose() + K * V * K.transpose();
}
//计算雅克比矩阵以及残差项 P61 Quaternion kinematics for the error-state Kalman filter
void GpsProcessor::ComputeJacobianAndResidual(const Eigen::Vector3d& init_lla,
const GpsPositionDataPtr gps_data,
const State& state,
Eigen::Matrix<double, 3, 15>* jacobian,
Eigen::Vector3d* residual) {
const Eigen::Vector3d& G_p_I = state.G_p_I;
const Eigen::Matrix3d& G_R_I = state.G_R_I;
// Convert wgs84 to ENU frame.
Eigen::Vector3d G_p_Gps;
ConvertLLAToENU(init_lla, gps_data->lla, &G_p_Gps);
// Compute residual.
*residual = G_p_Gps - (G_p_I + G_R_I * I_p_Gps_);
// Compute jacobian.
jacobian->setZero();
jacobian->block<3, 3>(0, 0) = Eigen::Matrix3d::Identity();
jacobian->block<3, 3>(0, 6) = - G_R_I * GetSkewMatrix(I_p_Gps_);
}
//添加误差项到状态
void AddDeltaToState(const Eigen::Matrix<double, 15, 1>& delta_x, State* state) {
state->G_p_I += delta_x.block<3, 1>(0, 0);
state->G_v_I += delta_x.block<3, 1>(3, 0);
state->acc_bias += delta_x.block<3, 1>(9, 0);
state->gyro_bias += delta_x.block<3, 1>(12, 0);
if (delta_x.block<3, 1>(6, 0).norm() > 1e-12) {
state->G_R_I *= Eigen::AngleAxisd(delta_x.block<3, 1>(6, 0).norm(), delta_x.block<3, 1>(6, 0).normalized()).toRotationMatrix();
}
}