(1) DenseOpticalFlow sample code
#include <iostream>
#include <fstream>
#include "opencv2/video/tracking.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
inline bool isFlowCorrect(Point2f u)
{
return !cvIsNaN(u.x) && !cvIsNaN(u.y) && fabs(u.x) < 1e9 && fabs(u.y) < 1e9;
}
static Vec3b computeColor(float fx, float fy)
{
static bool first = true;
// relative lengths of color transitions:
// these are chosen based on perceptual similarity
// (e.g. one can distinguish more shades between red and yellow
// than between yellow and green)
const int RY = 15;
const int YG = 6;
const int GC = 4;
const int CB = 11;
const int BM = 13;
const int MR = 6;
const int NCOLS = RY + YG + GC + CB + BM + MR;
static Vec3i colorWheel[NCOLS];
if (first)
{
int k = 0;
for (int i = 0; i < RY; ++i, ++k)
colorWheel[k] = Vec3i(255, 255 * i / RY, 0);
for (int i = 0; i < YG; ++i, ++k)
colorWheel[k] = Vec3i(255 - 255 * i / YG, 255, 0);
for (int i = 0; i < GC; ++i, ++k)
colorWheel[k] = Vec3i(0, 255, 255 * i / GC);
for (int i = 0; i < CB; ++i, ++k)
colorWheel[k] = Vec3i(0, 255 - 255 * i / CB, 255);
for (int i = 0; i < BM; ++i, ++k)
colorWheel[k] = Vec3i(255 * i / BM, 0, 255);
for (int i = 0; i < MR; ++i, ++k)
colorWheel[k] = Vec3i(255, 0, 255 - 255 * i / MR);
first = false;
}
const float rad = sqrt(fx * fx + fy * fy);
const float a = atan2(-fy, -fx) / (float)CV_PI;
const float fk = (a + 1.0f) / 2.0f * (NCOLS - 1);
const int k0 = static_cast<int>(fk);
const int k1 = (k0 + 1) % NCOLS;
const float f = fk - k0;
Vec3b pix;
for (int b = 0; b < 3; b++)
{
const float col0 = colorWheel[k0][b] / 255.f;
const float col1 = colorWheel[k1][b] / 255.f;
float col = (1 - f) * col0 + f * col1;
if (rad <= 1)
col = 1 - rad * (1 - col); // increase saturation with radius
else
col *= .75; // out of range
pix[2 - b] = static_cast<uchar>(255.f * col);
}
return pix;
}
static void drawOpticalFlow(const Mat_<Point2f>& flow, Mat& dst, float maxmotion = -1)
{
dst.create(flow.size(), CV_8UC3);
dst.setTo(Scalar::all(0));
// determine motion range:
float maxrad = maxmotion;
if (maxmotion <= 0)
{
maxrad = 1;
for (int y = 0; y < flow.rows; ++y)
{
for (int x = 0; x < flow.cols; ++x)
{
Point2f u = flow(y, x);
if (!isFlowCorrect(u))
continue;
maxrad = max(maxrad, sqrt(u.x * u.x + u.y * u.y));
}
}
}
for (int y = 0; y < flow.rows; ++y)
{
for (int x = 0; x < flow.cols; ++x)
{
Point2f u = flow(y, x);
if (isFlowCorrect(u))
dst.at<Vec3b>(y, x) = computeColor(u.x / maxrad, u.y / maxrad);
}
}
}
// binary file format for flow data specified here:
// http://vision.middlebury.edu/flow/data/
static void writeOpticalFlowToFile(const Mat_<Point2f>& flow, const string& fileName)
{
static const char FLO_TAG_STRING[] = "PIEH";
ofstream file(fileName.c_str(), ios_base::binary);
file << FLO_TAG_STRING;
file.write((const char*) &flow.cols, sizeof(int));
file.write((const char*) &flow.rows, sizeof(int));
for (int i = 0; i < flow.rows; ++i)
{
for (int j = 0; j < flow.cols; ++j)
{
const Point2f u = flow(i, j);
file.write((const char*) &u.x, sizeof(float));
file.write((const char*) &u.y, sizeof(float));
}
}
}
int main(int argc, const char* argv[])
{
if (argc < 3)
{
cerr << "Usage : " << argv[0] << "<frame0> <frame1> [<output_flow>]" << endl;
return -1;
}
Mat frame0 = imread(argv[1], IMREAD_GRAYSCALE);
Mat frame1 = imread(argv[2], IMREAD_GRAYSCALE);
if (frame0.empty())
{
cerr << "Can't open image [" << argv[1] << "]" << endl;
return -1;
}
if (frame1.empty())
{
cerr << "Can't open image [" << argv[2] << "]" << endl;
return -1;
}
if (frame1.size() != frame0.size())
{
cerr << "Images should be of equal sizes" << endl;
return -1;
}
Mat_<Point2f> flow;
Ptr<DenseOpticalFlow> tvl1 = createOptFlow_DualTVL1();
const double start = (double)getTickCount();
tvl1->calc(frame0, frame1, flow);
const double timeSec = (getTickCount() - start) / getTickFrequency();
cout << "calcOpticalFlowDual_TVL1 : " << timeSec << " sec" << endl;
Mat out;
drawOpticalFlow(flow, out);
if (argc == 4)
writeOpticalFlowToFile(flow, argv[3]);
imshow("Flow", out);
waitKey();
return 0;
}
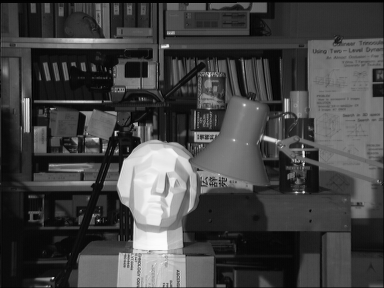
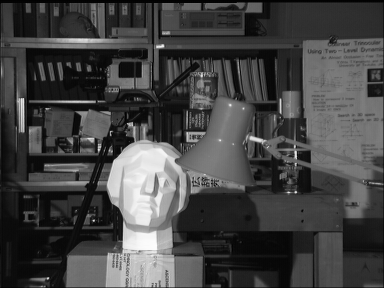
(2) Test effect