蓝色
紫色
红色
写在前面:本篇Blog仅作为学习笔记,学习内容来自于北邮CV-XUEBA团队的三维重建(精简版,鲁鹏)课程。
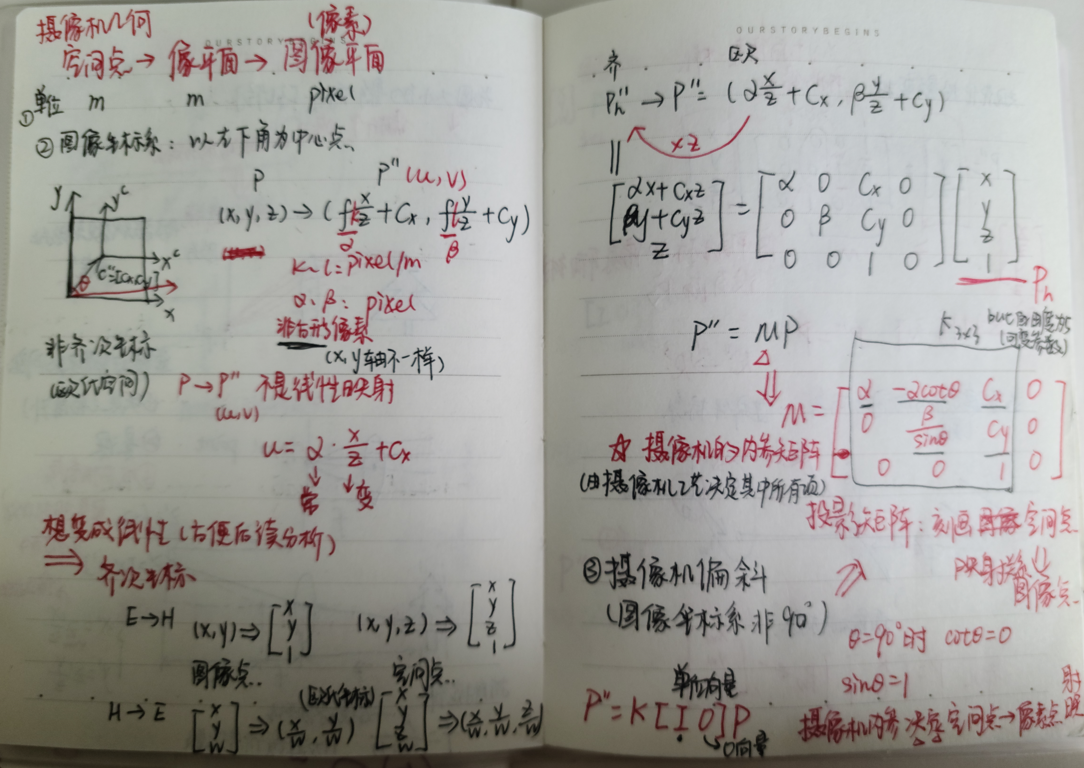
摄像机几何
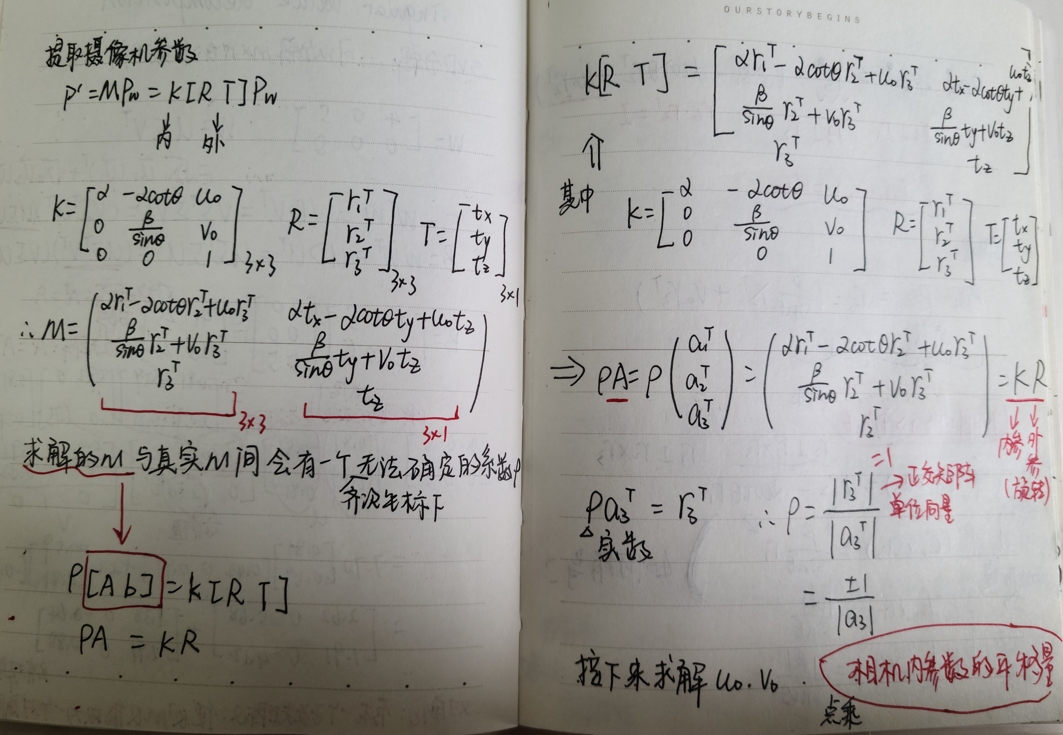
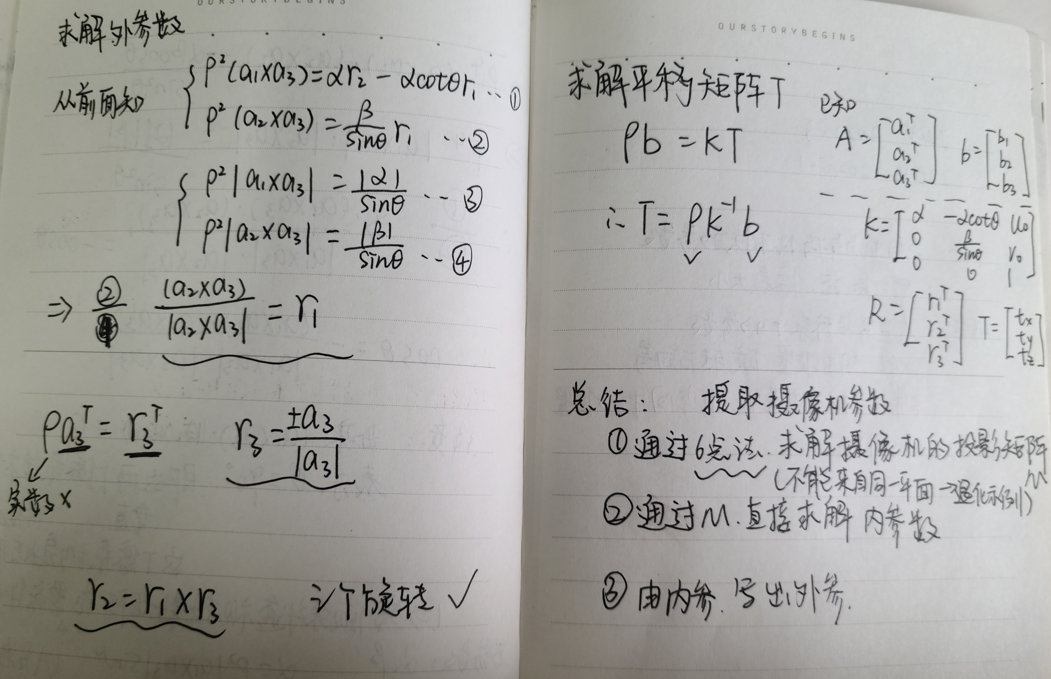
内参:与相机 自身特性 相关的参数 (eg. 焦距、像素大小等)
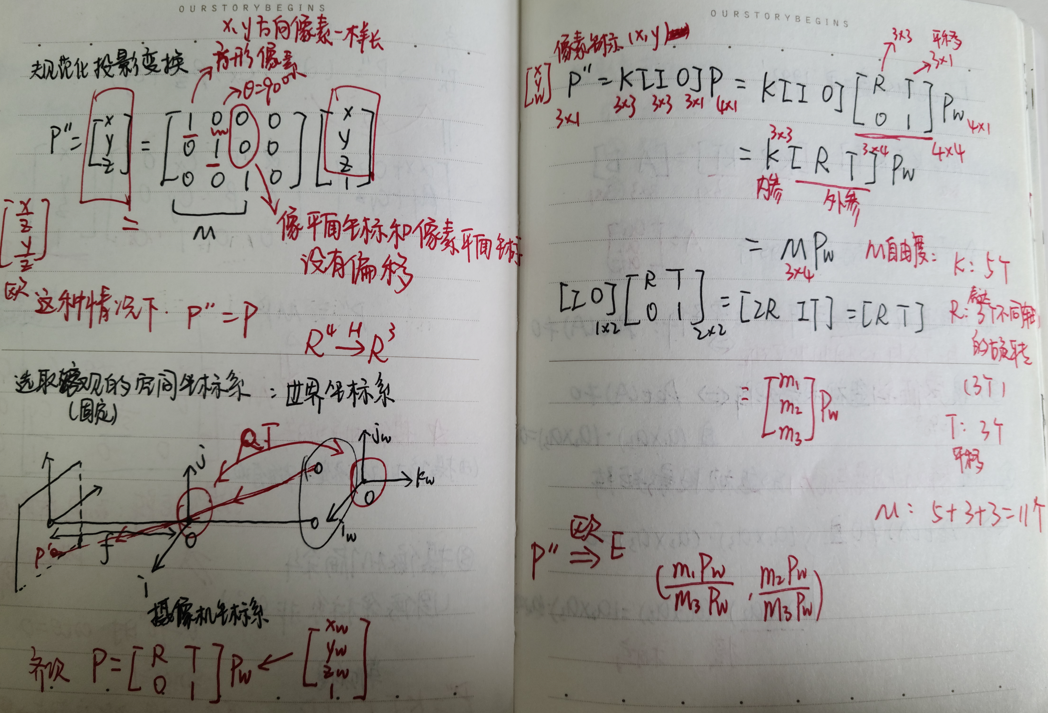
外参:在世界坐标系中的参数 (eg. 相机位置、旋转方向等),确定了相机在某个三维空间中的 位置和朝向 。
针孔摄像机&透镜
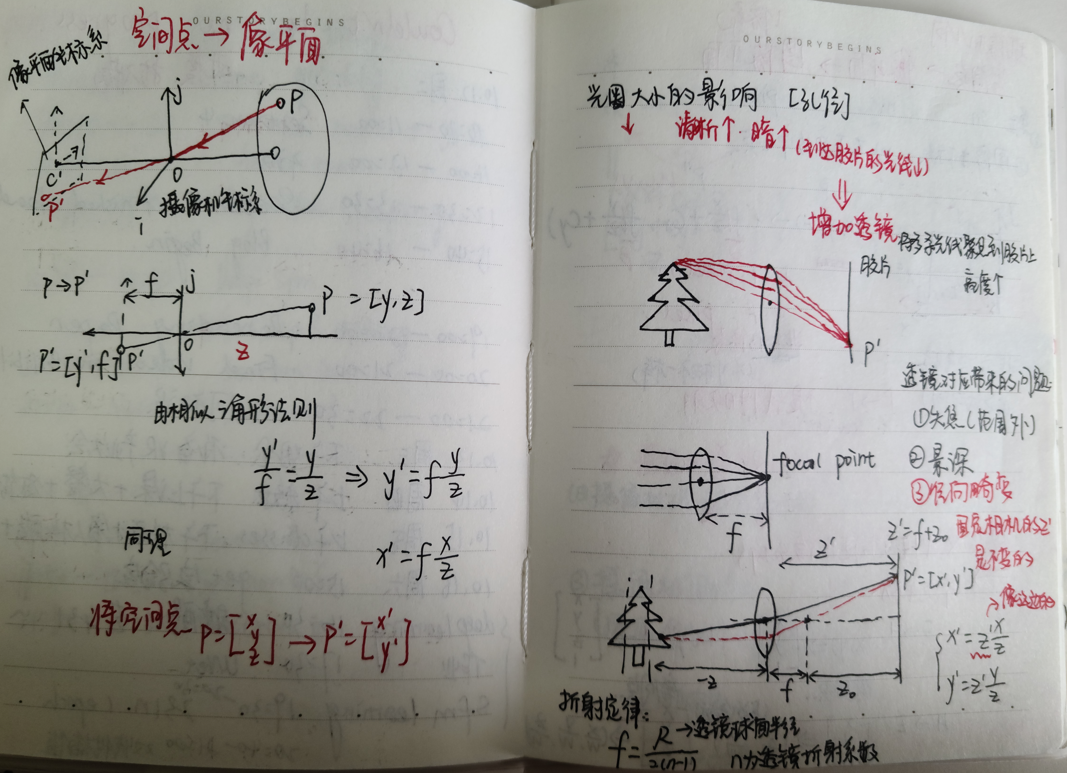
摄像机几何

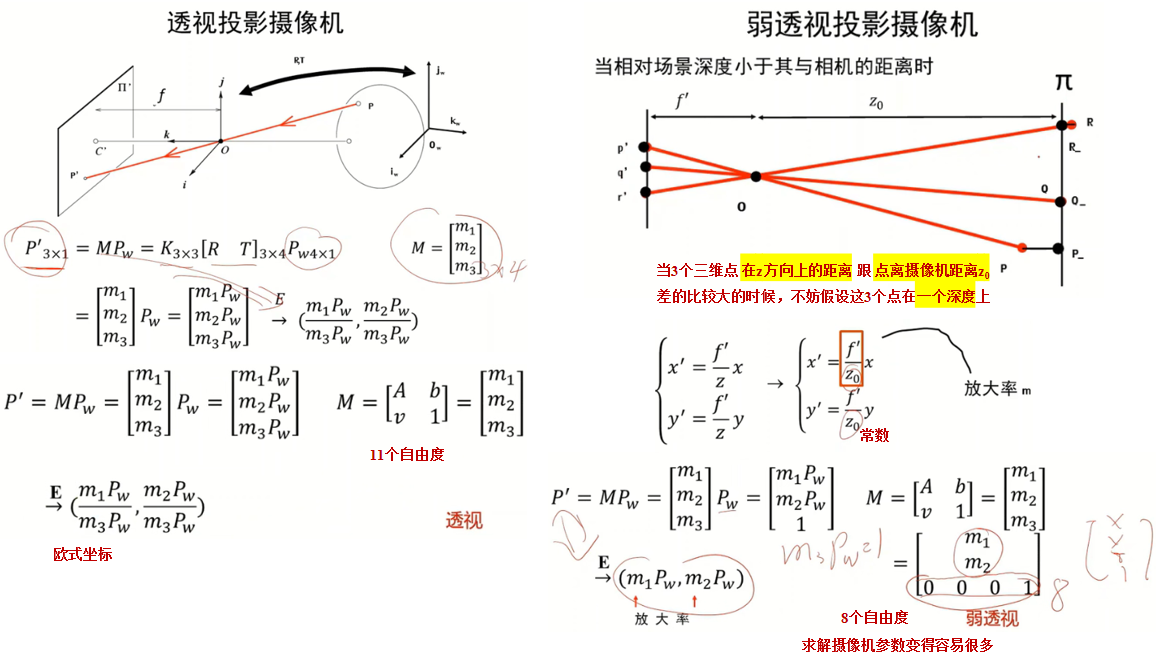
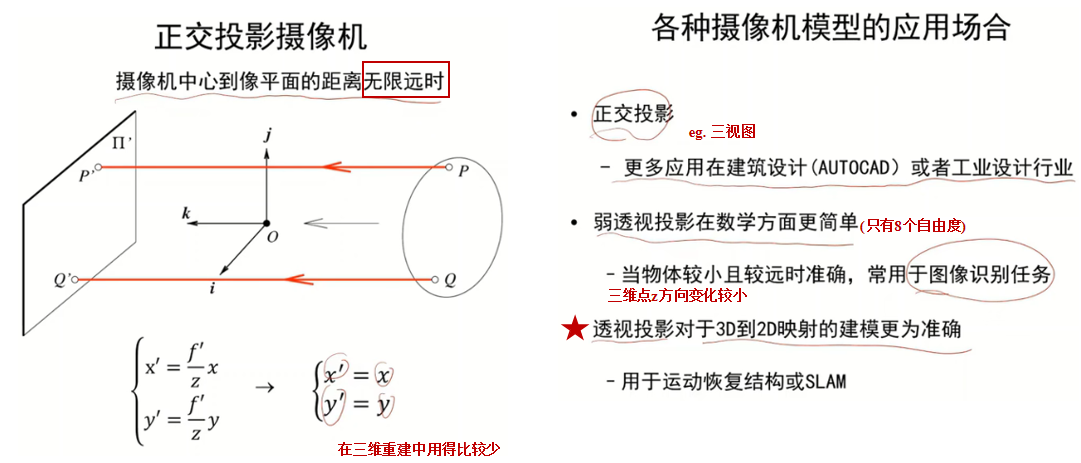
其他摄像机模型 & 应用场景总结
相机标定
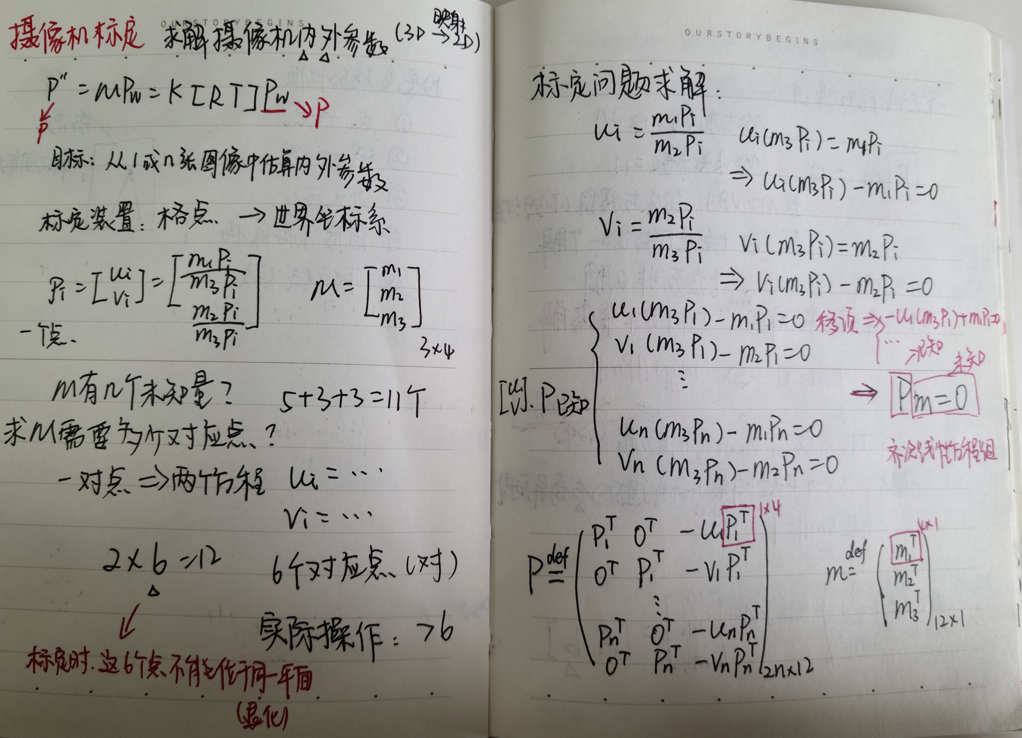
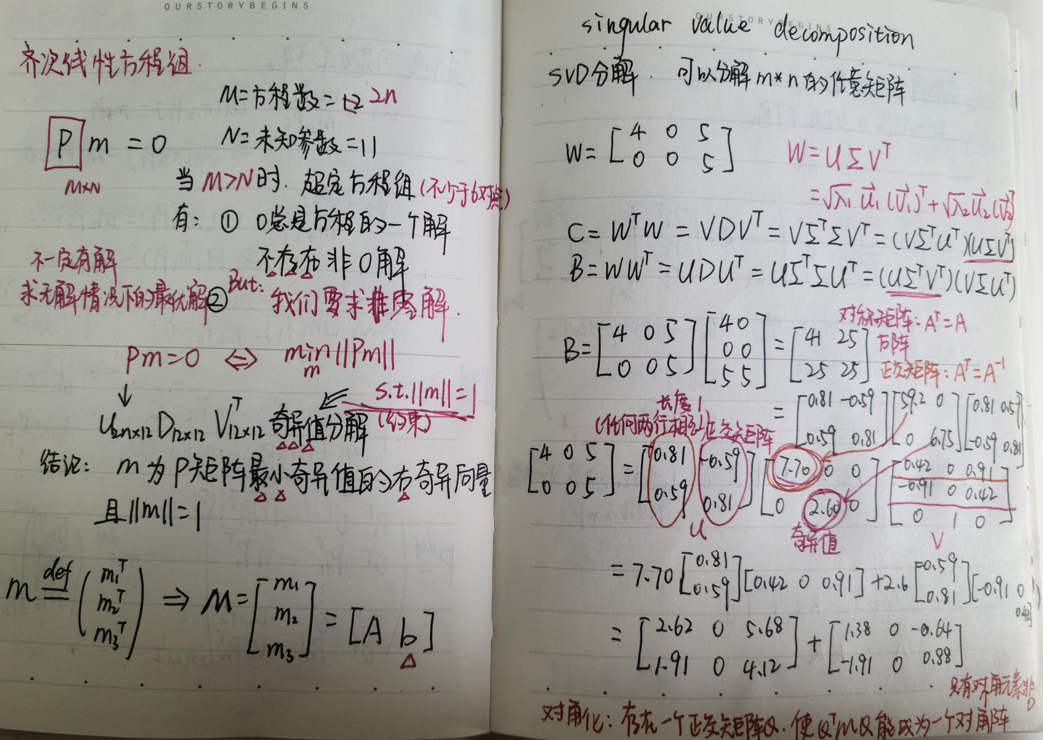
摄像机标定

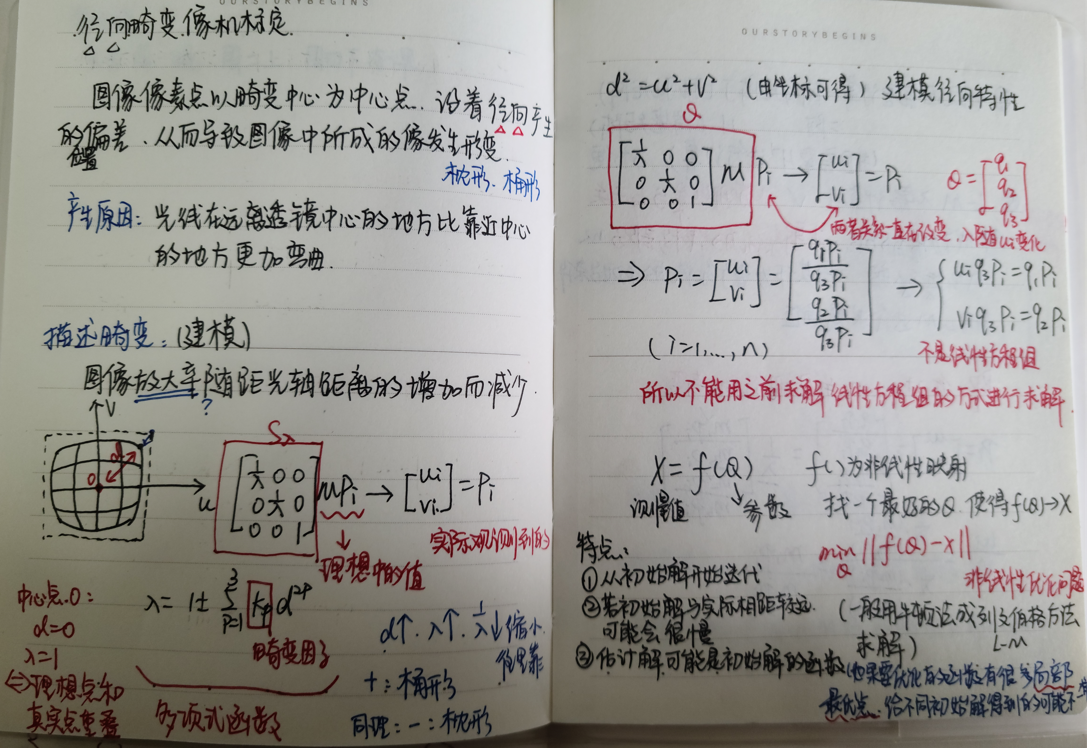
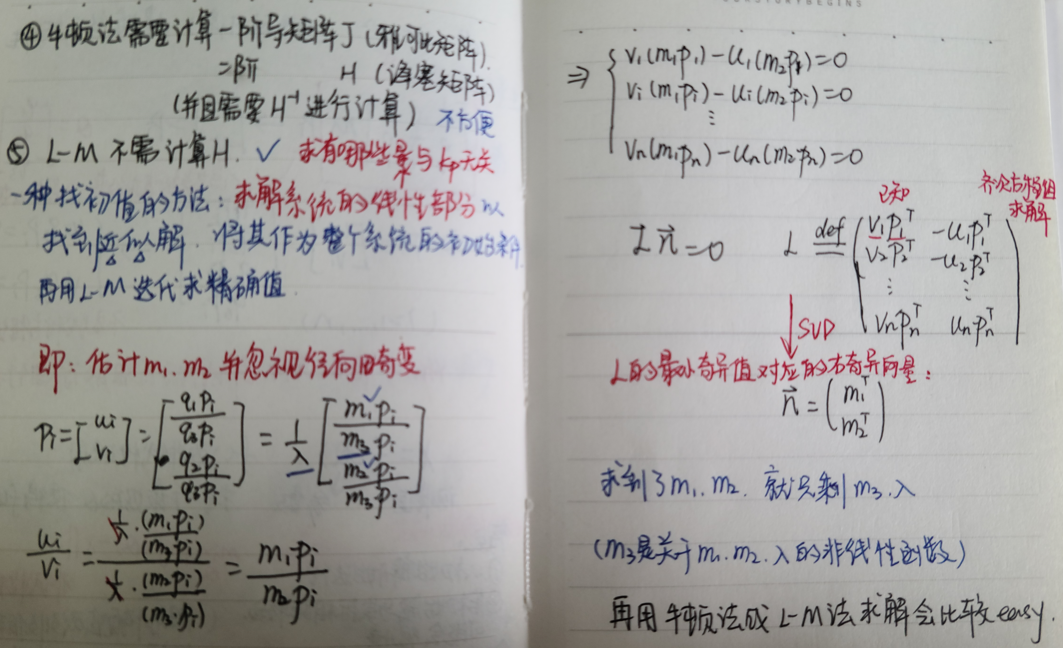
径向畸变摄像机标定
蓝色
紫色
红色
写在前面:本篇Blog仅作为学习笔记,学习内容来自于北邮CV-XUEBA团队的三维重建(精简版,鲁鹏)课程。
内参:与相机 自身特性 相关的参数 (eg. 焦距、像素大小等)
外参:在世界坐标系中的参数 (eg. 相机位置、旋转方向等),确定了相机在某个三维空间中的 位置和朝向 。