例子滤波方法入门:分析典型非线性系统数学模型
主要内容:
1、非线性数学模型
2、用粒子滤波的MATLAB程序简介
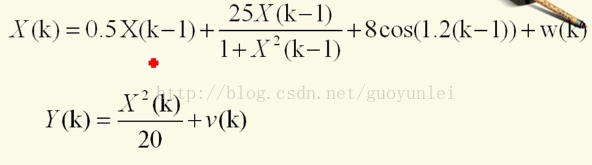
1、非线性数学模型
2、用粒子滤波的MATLAB程序简介
function [ output_args] = Untitled( input_args )
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 模型:在一维空间,用非线性状态方程和观测方程,用例子滤波方法进行数模分析
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 清零
close all;
clear all;
clc;
%% 第1段:噪声变化与噪声模拟
tf = 100; %时间模拟长度
w = rand(1,tf); %rand函数产生由在(0, 1)之间均匀分布的随机数组成的数组,本文为一个1行100列的数组
Q = var(w); %求方差公式。
W = sqrt(Q)*w; %过程噪声,标准差乘以随机数。
vnoise = randn(1,tf);%randn:产生均值为0,方差σ^2 = 1,标准差σ = 1的正态分布的随机数或矩阵的函数
R = var(vnoise); %求方差
V = sqrt(R)*vnoise; %观测噪声
%% 第2段:状态方程于观测方程、滤波估计机器初始值设定
x = 0.1; %真实状态初始值
x_estimate = 1; %真实状态初始值的估计值
p_x_estimate = x_estimate;%PF的初始估计值(没有粒子滤波之前的初始估计值,当例子滤波开始后,就会逐步与真实状态值靠近)
pf_P = 5; %PF误差方差初始值
x_array = [x]; %真实值数组(真实值观测不到的,但是是实际的状态)
p_x_estimate_array = [p_x_estimate];%PF最优估计值数组,把初始估计值加进来作为第一个。
N = 500; %粒子滤波的粒子数
%% 第3段:非线性数字模拟系统,计算得到PK估计值
% 第一步:初始化状态,利用状态初始值x_estimate = 1,用大量例子模拟X(t),粒子在空间均匀分布;生成例子滤波初始N个例子
for i = 1:N %N = 500
p_xpart(i) = p_x_estimate + sqrt(pf_P)*rand; %最好均匀分布randn
end
for k = 1:tf %在100个时间步长里计算
%模拟非线性系统
x = 0.5 * x + (25 * x / (1 + x^2)) + 8 * cos(1.2*(k-1)) + W(k);%状态值(实际值).其中是W是个1*100的数组。W(k)是第k个。
y = (x^2/20) + V(k); %观测值(实际值的观测值)
% 第二步:预测阶段,根据状态转移方程,每一个粒子得到一个预测粒子
for i = 1 : N %N = 500,粒子也要代入状态方程。这一步就是实际值和粒子根据状态方程得出的结果之差,来衡量每个粒子的重要程度。
p_xpartminus(i) = 0.5 * p_xpart(i) + (25 * p_xpart(i)) / (1 + p_xpart(i)^2) + 8 * cos(1.2*(k-1)) + W(k);
%第三步:校正阶段,将生成的粒子带入含噪的状态方程,对预测粒子进行评价,越接近于真实状态的粒子,其权重越大;
p_ypart = p_xpartminus(i)^2 / 20; %利用观测方程计算观测预测值,在此计算时,一般不加观测方程里的误差。
p_vhat = y - p_ypart; %含噪观测值和粒子观测预测值的差
p_q(i) = (1 / sqrt(R) / sqrt(2*pi)) * exp(-p_vhat^2 / 2 / R); %根据差值给出100个粒子对应的权重,差越小权重越大
end
% 平均每一个估计的可能性
p_qsum = sum(p_q);
for i = 1:N
p_q(i) = p_q(i) / p_qsum; %各个粒子进行权值归一化
end
% 第四步:重采样,根据粒子权重对例子进行筛选,筛选过程中,既要大量保留权重大的粒子,又要有一小部分权重小的粒子
for i=1:N %在这里,依次赋值给p_xpart(1)、p_xpart(2)。。。
p_u = rand; %均匀分布
p_qtempsum = 0;
for j = 1:N %先产生一个均匀分布的随机数,比如0.5,然后让p_q(j)累计相加,当p_qtempsum >= p_u的那一瞬间,其对应的值赋给p_xpart(1).
p_qtempsum = p_qtempsum + p_q(j);
if p_qtempsum >= p_u
p_xpart(i) = p_xpartminus(j);%在这里 p_xpart(i)实现循环赋值,上边比较的是权值累加,这里赋值的是粒子值。
break;
end
end
end
%第五步:滤波,将重采样后的粒子带入状态转移方程得到新的预测粒子,即步骤2,
p_x_estimate = mean(p_xpart);%求重采样后的粒子值的平均值,就是最终的预测值。且粒子值p_xpart会代入状态方程进入下一个循环。
%进行画图程序
x_array = [x_array,x];%真实值数组
p_x_estimate_array = [p_x_estimate_array,p_x_estimate];%预测值数组。
p_error(k,:) = abs(x_array(k) - p_x_estimate_array(k));%误差数组。
end
%% 第4段:粒子滤波绘图
t = 0:tf;
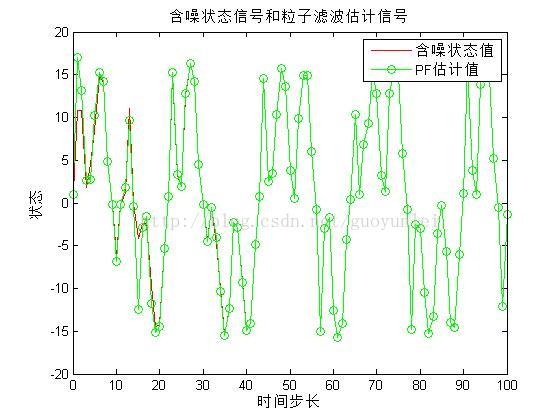
figure(1);
plot(t, x_array, '-r', t, p_x_estimate_array, 'g-o');
xlabel('时间步长');
ylabel('状态');
legend('含噪状态值','PF估计值');
title('含噪状态信号和粒子滤波估计信号');
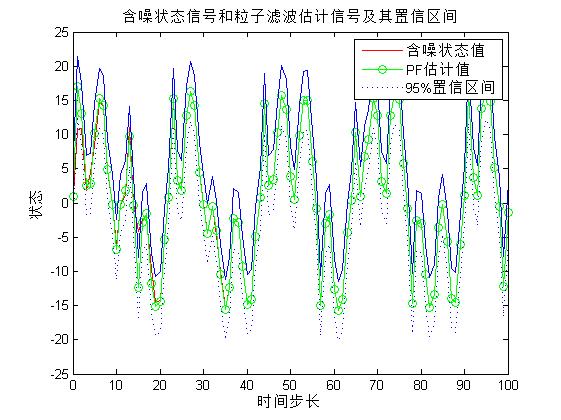
figure(2);
plot(t, x_array, '-r', t, p_x_estimate_array, 'g-o', t, p_x_estimate_array-1.96*sqrt(pf_P), 'b:', t, p_x_estimate_array+1.96*sqrt(pf_P), 'b')
xlabel('时间步长');
ylabel('状态');
legend('含噪状态值','PF估计值','95%置信区间');
title('含噪状态信号和粒子滤波估计信号及其置信区间');
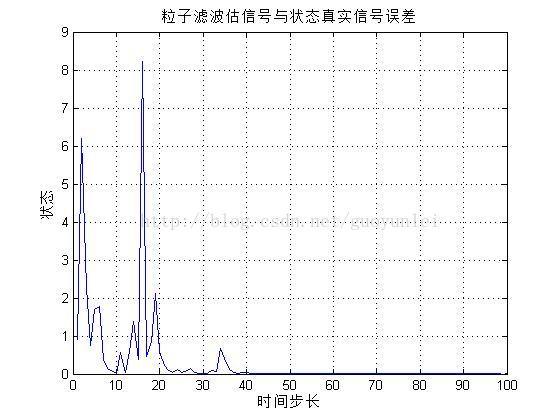
%% 第5段:误差分析及其绘图
p_xrms = sqrt((norm(x_array - p_x_estimate_array)^2)/tf);
disp(['PF估计误差均方值=', num2str(p_xrms)]);
t = 1:tf;
figure(3);
plot(t,p_error);
xlabel('时间步长');
ylabel('状态');
grid
title('粒子滤波估信号与状态真实信号误差')
end3、图示结果