Artikelverzeichnis
Vorwort
Dieser Blog zeichnet den Betrieb des dritten Experiments in Kapitel 5 von „Operating System Truth Restore“ ~ auf
Experimentelle Umgebung : Ubuntu18.04+VMware, Bochs herunterladen und installieren
Experimentinhalt : Laden Sie den Kernel in den Speicher und initialisieren Sie den Kernelcode
Experimentelles Prinzip
- Kernelprogramm schreiben.
- Verwenden Sie den Befehl dd, um das Kernelprogramm auf die Festplatte zu kopieren.
- Loader.S liest die Festplatte und lädt den Kernel in den Speicher (Speicherpuffer). Initialisieren Sie dann den Kernel, dh platzieren Sie nach dem Paging die geladene Elf-Kernel-Datei an der entsprechenden virtuellen Speicheradresse und springen Sie dann zur Ausführung. Von da an endet die Arbeit des Loaders.

vorausgesetzte Kenntnisse
elf-Dateiformat (zu füllende Löcher...)
der Code
kernel/main.c
Kernelprogramm geschrieben.
int main(void) {
while(1);
return 0;
}
boot/loader.S
Zwei Dinge, die in der Datei „loader.S“ geändert werden müssen
-
Laden des Kernels: Die Kerneldatei muss in den Speicherpuffer geladen (einfach in den Speicher kopiert) werden. Nach dem Laden in den Speicher erweitert Loader ihn auch an einen neuen Speicherort, indem er seine Elf-Struktur analysiert. Insbesondere verfügt der Kernel über zwei Kopien im Speicher, eine ist die Originaldatei kernel.bin im Elf-Format und die andere ist das Kernel-Image, das im Speicher generiert wird, nachdem der Loader die Datei kernel.bin im Elf-Format analysiert hat. Dieses Bild ist Das tatsächlich laufender Kernel .
-
Initialisierung des Kernels: Nach dem Paging muss die geladene Elf-Kernel-Datei an der entsprechenden virtuellen Speicheradresse abgelegt und dann zur
Ausführung gesprungen werden. Von da an endet die Arbeit des Loaders.
Loader.S Teil 1
Die Funktion dieses Teils besteht darin, die Kerneldatei von der Festplatte in den Speicher zu laden.
; ------------------------- 加载kernel ----------------------
mov eax, KERNEL_START_SECTOR ; kernel.bin所在的扇区号
mov ebx, KERNEL_BIN_BASE_ADDR ; 从磁盘读出后,写入到ebx指定的地址
mov ecx, 200 ; 读入的扇区数
call rd_disk_m_32
; 创建页目录及页表并初始化页内存位图
call setup_page
- ecx ist 200, was der Anzahl der gelesenen Sektoren entspricht. Dies stimmt mit der Parameteranzahl überein, wenn der Befehl dd zum Schreiben der Kerneldatei auf die Festplatte verwendet wird.
- Rufen Sie rd_disk_m_32 auf und lesen Sie Dateien von der Festplatte.
- setup_page, beginnen Sie mit der Erstellung der Seitentabelle.
Loader.S Teil 2
Der Zweck dieses Teils besteht darin, den Kernel zu initialisieren. Beim Initialisieren des Kernels wird das Segment in der Kerneldatei erweitert (kopiert), um den entsprechenden Speicherort im Speicher gemäß der Elf-Spezifikation zu kopieren. Dieses Experiment wählt 0x1500 als Eintragsadresse des Kernel-Images.
;----------------- 将kernel.bin中的segment拷贝到编译的地址 -----------
kernel_init:
xor eax, eax
xor ebx, ebx ;ebx记录程序头表地址
xor ecx, ecx ;cx记录程序头表中的program header数量
xor edx, edx ;dx 记录program header尺寸,即e_phentsize
mov dx, [KERNEL_BIN_BASE_ADDR + 42] ; 偏移文件42字节处的属性是e_phentsize,表示program header大小
mov ebx, [KERNEL_BIN_BASE_ADDR + 28] ; 偏移文件开始部分28字节的地方是e_phoff,表示第1 个program header在文件中的偏移量
; 其实该值是0x34,不过还是谨慎一点,这里来读取实际值
add ebx, KERNEL_BIN_BASE_ADDR
mov cx, [KERNEL_BIN_BASE_ADDR + 44] ; 偏移文件开始部分44字节的地方是e_phnum,表示有几个program header
.each_segment:
cmp byte [ebx + 0], PT_NULL ; 若p_type等于 PT_NULL,说明此program header未使用。
je .PTNULL
;为函数memcpy压入参数,参数是从右往左依然压入.函数原型类似于 memcpy(dst,src,size)
push dword [ebx + 16] ; program header中偏移16字节的地方是p_filesz,压入函数memcpy的第三个参数:size
mov eax, [ebx + 4] ; 距程序头偏移量为4字节的位置是p_offset
add eax, KERNEL_BIN_BASE_ADDR ; 加上kernel.bin被加载到的物理地址,eax为该段的物理地址
push eax ; 压入函数memcpy的第二个参数:源地址
push dword [ebx + 8] ; 压入函数memcpy的第一个参数:目的地址,偏移程序头8字节的位置是p_vaddr,这就是目的地址
call mem_cpy ; 调用mem_cpy完成段复制
add esp,12 ; 清理栈中压入的三个参数
.PTNULL:
add ebx, edx ; edx为program header大小,即e_phentsize,在此ebx指向下一个program header
loop .each_segment
ret
;---------- 逐字节拷贝 mem_cpy(dst,src,size) ------------
;输入:栈中三个参数(dst,src,size)
;输出:无
;---------------------------------------------------------
mem_cpy:
cld
push ebp
mov ebp, esp
push ecx ; rep指令用到了ecx,但ecx对于外层段的循环还有用,故先入栈备份
mov edi, [ebp + 8] ; dst
mov esi, [ebp + 12] ; src
mov ecx, [ebp + 16] ; size
rep movsb ; 逐字节拷贝
;恢复环境
pop ecx
pop ebp
ret
- Das Prinzip von kernel_init besteht darin, jedes Segment im Programm zu analysieren. Wenn der Segmenttyp nicht PT_NULL (leerer Programmtyp) ist, wird das Segment an die kompilierte Adresse kopiert.
each_segmentDie Funktion besteht darin, die Informationen jedes Segments zu durchlaufen.mem_cpyDie Funktion besteht darin, an die virtuelle Adresse des Segments selbst zu kopieren.
Loader.STeil 3
Die Funktion dieses Teils besteht darin, nach dem Einschalten des Pagings die neue Adresse von gdt neu zu laden.
;在开启分页后,用gdt新的地址重新加载
lgdt [gdt_ptr] ; 重新加载
mov byte [gs:160], 'V' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:162], 'i' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:164], 'r' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:166], 't' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:168], 'u' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:170], 'a' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:172], 'l' ;视频段段基址已经被更新,用字符v表示virtual addr
;;;;;;;;;;;;;;;;;;;;;;;;;;;; 此时不刷新流水线也没问题 ;;;;;;;;;;;;;;;;;;;;;;;;
;由于一直处在32位下,原则上不需要强制刷新,经过实际测试没有以下这两句也没问题.
;但以防万一,还是加上啦,免得将来出来莫句奇妙的问题.
jmp SELECTOR_CODE:enter_kernel ;强制刷新流水线,更新gdt
enter_kernel:
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
mov byte [gs:320], 'k' ;视频段段基址已经被更新
mov byte [gs:322], 'e' ;视频段段基址已经被更新
mov byte [gs:324], 'r' ;视频段段基址已经被更新
mov byte [gs:326], 'n' ;视频段段基址已经被更新
mov byte [gs:328], 'e' ;视频段段基址已经被更新
mov byte [gs:330], 'l' ;视频段段基址已经被更新
mov byte [gs:480], 'w' ;视频段段基址已经被更新
mov byte [gs:482], 'h' ;视频段段基址已经被更新
mov byte [gs:484], 'i' ;视频段段基址已经被更新
mov byte [gs:486], 'l' ;视频段段基址已经被更新
mov byte [gs:488], 'e' ;视频段段基址已经被更新
mov byte [gs:490], '(' ;视频段段基址已经被更新
mov byte [gs:492], '1' ;视频段段基址已经被更新
mov byte [gs:494], ')' ;视频段段基址已经被更新
mov byte [gs:496], ';' ;视频段段基址已经被更新
call kernel_init
mov esp, 0xc009f000
jmp KERNEL_ENTRY_POINT ; 用地址0x1500访问测试,结果ok
Vollständiger Code
%include "boot.inc"
section loader vstart=LOADER_BASE_ADDR
;构建gdt及其内部的描述符
GDT_BASE: dd 0x00000000
dd 0x00000000
CODE_DESC: dd 0x0000FFFF
dd DESC_CODE_HIGH4
DATA_STACK_DESC: dd 0x0000FFFF
dd DESC_DATA_HIGH4
VIDEO_DESC: dd 0x80000007 ; limit=(0xbffff-0xb8000)/4k=0x7
dd DESC_VIDEO_HIGH4 ; 此时dpl为0
GDT_SIZE equ $ - GDT_BASE
GDT_LIMIT equ GDT_SIZE - 1
times 60 dq 0 ; 此处预留60个描述符的空位(slot)
SELECTOR_CODE equ (0x0001<<3) + TI_GDT + RPL0 ; 相当于(CODE_DESC - GDT_BASE)/8 + TI_GDT + RPL0
SELECTOR_DATA equ (0x0002<<3) + TI_GDT + RPL0 ; 同上
SELECTOR_VIDEO equ (0x0003<<3) + TI_GDT + RPL0 ; 同上
; total_mem_bytes用于保存内存容量,以字节为单位,此位置比较好记。
; 当前偏移loader.bin文件头0x200字节,loader.bin的加载地址是0x900,
; 故total_mem_bytes内存中的地址是0xb00.将来在内核中咱们会引用此地址
total_mem_bytes dd 0
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;以下是定义gdt的指针,前2字节是gdt界限,后4字节是gdt起始地址
gdt_ptr dw GDT_LIMIT
dd GDT_BASE
;人工对齐:total_mem_bytes4字节+gdt_ptr6字节+ards_buf244字节+ards_nr2,共256字节
ards_buf times 244 db 0
ards_nr dw 0 ;用于记录ards结构体数量
loader_start:
;------- int 15h eax = 0000E820h ,edx = 534D4150h ('SMAP') 获取内存布局 -------
xor ebx, ebx ;第一次调用时,ebx值要为0
mov edx, 0x534d4150 ;edx只赋值一次,循环体中不会改变
mov di, ards_buf ;ards结构缓冲区
.e820_mem_get_loop: ;循环获取每个ARDS内存范围描述结构
mov eax, 0x0000e820 ;执行int 0x15后,eax值变为0x534d4150,所以每次执行int前都要更新为子功能号。
mov ecx, 20 ;ARDS地址范围描述符结构大小是20字节
int 0x15
jc .e820_failed_so_try_e801 ;若cf位为1则有错误发生,尝试0xe801子功能
add di, cx ;使di增加20字节指向缓冲区中新的ARDS结构位置
inc word [ards_nr] ;记录ARDS数量
cmp ebx, 0 ;若ebx为0且cf不为1,这说明ards全部返回,当前已是最后一个
jnz .e820_mem_get_loop
;在所有ards结构中,找出(base_add_low + length_low)的最大值,即内存的容量。
mov cx, [ards_nr] ;遍历每一个ARDS结构体,循环次数是ARDS的数量
mov ebx, ards_buf
xor edx, edx ;edx为最大的内存容量,在此先清0
.find_max_mem_area: ;无须判断type是否为1,最大的内存块一定是可被使用
mov eax, [ebx] ;base_add_low
add eax, [ebx+8] ;length_low
add ebx, 20 ;指向缓冲区中下一个ARDS结构
cmp edx, eax ;冒泡排序,找出最大,edx寄存器始终是最大的内存容量
jge .next_ards
mov edx, eax ;edx为总内存大小
.next_ards:
loop .find_max_mem_area
jmp .mem_get_ok
;------ int 15h ax = E801h 获取内存大小,最大支持4G ------
; 返回后, ax cx 值一样,以KB为单位,bx dx值一样,以64KB为单位
; 在ax和cx寄存器中为低16M,在bx和dx寄存器中为16MB到4G。
.e820_failed_so_try_e801:
mov ax,0xe801
int 0x15
jc .e801_failed_so_try88 ;若当前e801方法失败,就尝试0x88方法
;1 先算出低15M的内存,ax和cx中是以KB为单位的内存数量,将其转换为以byte为单位
mov cx,0x400 ;cx和ax值一样,cx用做乘数
mul cx
shl edx,16
and eax,0x0000FFFF
or edx,eax
add edx, 0x100000 ;ax只是15MB,故要加1MB
mov esi,edx ;先把低15MB的内存容量存入esi寄存器备份
;2 再将16MB以上的内存转换为byte为单位,寄存器bx和dx中是以64KB为单位的内存数量
xor eax,eax
mov ax,bx
mov ecx, 0x10000 ;0x10000十进制为64KB
mul ecx ;32位乘法,默认的被乘数是eax,积为64位,高32位存入edx,低32位存入eax.
add esi,eax ;由于此方法只能测出4G以内的内存,故32位eax足够了,edx肯定为0,只加eax便可
mov edx,esi ;edx为总内存大小
jmp .mem_get_ok
;----------------- int 15h ah = 0x88 获取内存大小,只能获取64M之内 ----------
.e801_failed_so_try88:
;int 15后,ax存入的是以kb为单位的内存容量
mov ah, 0x88
int 0x15
jc .error_hlt
and eax,0x0000FFFF
;16位乘法,被乘数是ax,积为32位.积的高16位在dx中,积的低16位在ax中
mov cx, 0x400 ;0x400等于1024,将ax中的内存容量换为以byte为单位
mul cx
shl edx, 16 ;把dx移到高16位
or edx, eax ;把积的低16位组合到edx,为32位的积
add edx,0x100000 ;0x88子功能只会返回1MB以上的内存,故实际内存大小要加上1MB
.mem_get_ok:
mov [total_mem_bytes], edx ;将内存换为byte单位后存入total_mem_bytes处。
;----------------- 准备进入保护模式 -------------------
;1 打开A20
;2 加载gdt
;3 将cr0的pe位置1
;----------------- 打开A20 ----------------
in al,0x92
or al,0000_0010B
out 0x92,al
;----------------- 加载GDT ----------------
lgdt [gdt_ptr]
;----------------- cr0第0位置1 ----------------
mov eax, cr0
or eax, 0x00000001
mov cr0, eax
jmp dword SELECTOR_CODE:p_mode_start ; 刷新流水线,避免分支预测的影响,这种cpu优化策略,最怕jmp跳转,
; 这将导致之前做的预测失效,从而起到了刷新的作用。
.error_hlt: ;出错则挂起
hlt
[bits 32]
p_mode_start:
mov ax, SELECTOR_DATA
mov ds, ax
mov es, ax
mov ss, ax
mov esp,LOADER_STACK_TOP
mov ax, SELECTOR_VIDEO
mov gs, ax
; ------------------------- 加载kernel ----------------------
mov eax, KERNEL_START_SECTOR ; kernel.bin所在的扇区号
mov ebx, KERNEL_BIN_BASE_ADDR ; 从磁盘读出后,写入到ebx指定的地址
mov ecx, 200 ; 读入的扇区数
call rd_disk_m_32
; 创建页目录及页表并初始化页内存位图
call setup_page
;要将描述符表地址及偏移量写入内存gdt_ptr,一会用新地址重新加载
sgdt [gdt_ptr] ; 存储到原来gdt所有的位置
;将gdt描述符中视频段描述符中的段基址+0xc0000000
mov ebx, [gdt_ptr + 2]
or dword [ebx + 0x18 + 4], 0xc0000000 ;视频段是第3个段描述符,每个描述符是8字节,故0x18。
;段描述符的高4字节的最高位是段基址的31~24位
;将gdt的基址加上0xc0000000使其成为内核所在的高地址
add dword [gdt_ptr + 2], 0xc0000000
add esp, 0xc0000000 ; 将栈指针同样映射到内核地址
; 把页目录地址赋给cr3
mov eax, PAGE_DIR_TABLE_POS
mov cr3, eax
; 打开cr0的pg位(第31位)
mov eax, cr0
or eax, 0x80000000
mov cr0, eax
;在开启分页后,用gdt新的地址重新加载
lgdt [gdt_ptr] ; 重新加载
mov byte [gs:160], 'V' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:162], 'i' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:164], 'r' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:166], 't' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:168], 'u' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:170], 'a' ;视频段段基址已经被更新,用字符v表示virtual addr
mov byte [gs:172], 'l' ;视频段段基址已经被更新,用字符v表示virtual addr
;;;;;;;;;;;;;;;;;;;;;;;;;;;; 此时不刷新流水线也没问题 ;;;;;;;;;;;;;;;;;;;;;;;;
;由于一直处在32位下,原则上不需要强制刷新,经过实际测试没有以下这两句也没问题.
;但以防万一,还是加上啦,免得将来出来莫句奇妙的问题.
jmp SELECTOR_CODE:enter_kernel ;强制刷新流水线,更新gdt
enter_kernel:
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
mov byte [gs:320], 'k' ;视频段段基址已经被更新
mov byte [gs:322], 'e' ;视频段段基址已经被更新
mov byte [gs:324], 'r' ;视频段段基址已经被更新
mov byte [gs:326], 'n' ;视频段段基址已经被更新
mov byte [gs:328], 'e' ;视频段段基址已经被更新
mov byte [gs:330], 'l' ;视频段段基址已经被更新
mov byte [gs:480], 'w' ;视频段段基址已经被更新
mov byte [gs:482], 'h' ;视频段段基址已经被更新
mov byte [gs:484], 'i' ;视频段段基址已经被更新
mov byte [gs:486], 'l' ;视频段段基址已经被更新
mov byte [gs:488], 'e' ;视频段段基址已经被更新
mov byte [gs:490], '(' ;视频段段基址已经被更新
mov byte [gs:492], '1' ;视频段段基址已经被更新
mov byte [gs:494], ')' ;视频段段基址已经被更新
mov byte [gs:496], ';' ;视频段段基址已经被更新
call kernel_init
mov esp, 0xc009f000
jmp KERNEL_ENTRY_POINT ; 用地址0x1500访问测试,结果ok
;----------------- 将kernel.bin中的segment拷贝到编译的地址 -----------
kernel_init:
xor eax, eax
xor ebx, ebx ;ebx记录程序头表地址
xor ecx, ecx ;cx记录程序头表中的program header数量
xor edx, edx ;dx 记录program header尺寸,即e_phentsize
mov dx, [KERNEL_BIN_BASE_ADDR + 42] ; 偏移文件42字节处的属性是e_phentsize,表示program header大小
mov ebx, [KERNEL_BIN_BASE_ADDR + 28] ; 偏移文件开始部分28字节的地方是e_phoff,表示第1 个program header在文件中的偏移量
; 其实该值是0x34,不过还是谨慎一点,这里来读取实际值
add ebx, KERNEL_BIN_BASE_ADDR
mov cx, [KERNEL_BIN_BASE_ADDR + 44] ; 偏移文件开始部分44字节的地方是e_phnum,表示有几个program header
.each_segment:
cmp byte [ebx + 0], PT_NULL ; 若p_type等于 PT_NULL,说明此program header未使用。
je .PTNULL
;为函数memcpy压入参数,参数是从右往左依然压入.函数原型类似于 memcpy(dst,src,size)
push dword [ebx + 16] ; program header中偏移16字节的地方是p_filesz,压入函数memcpy的第三个参数:size
mov eax, [ebx + 4] ; 距程序头偏移量为4字节的位置是p_offset
add eax, KERNEL_BIN_BASE_ADDR ; 加上kernel.bin被加载到的物理地址,eax为该段的物理地址
push eax ; 压入函数memcpy的第二个参数:源地址
push dword [ebx + 8] ; 压入函数memcpy的第一个参数:目的地址,偏移程序头8字节的位置是p_vaddr,这就是目的地址
call mem_cpy ; 调用mem_cpy完成段复制
add esp,12 ; 清理栈中压入的三个参数
.PTNULL:
add ebx, edx ; edx为program header大小,即e_phentsize,在此ebx指向下一个program header
loop .each_segment
ret
;---------- 逐字节拷贝 mem_cpy(dst,src,size) ------------
;输入:栈中三个参数(dst,src,size)
;输出:无
;---------------------------------------------------------
mem_cpy:
cld
push ebp
mov ebp, esp
push ecx ; rep指令用到了ecx,但ecx对于外层段的循环还有用,故先入栈备份
mov edi, [ebp + 8] ; dst
mov esi, [ebp + 12] ; src
mov ecx, [ebp + 16] ; size
rep movsb ; 逐字节拷贝
;恢复环境
pop ecx
pop ebp
ret
;------------- 创建页目录及页表 ---------------
setup_page:
;先把页目录占用的空间逐字节清0
mov ecx, 4096
mov esi, 0
.clear_page_dir:
mov byte [PAGE_DIR_TABLE_POS + esi], 0
inc esi
loop .clear_page_dir
;开始创建页目录项(PDE)
.create_pde: ; 创建Page Directory Entry
mov eax, PAGE_DIR_TABLE_POS
add eax, 0x1000 ; 此时eax为第一个页表的位置及属性
mov ebx, eax ; 此处为ebx赋值,是为.create_pte做准备,ebx为基址。
; 下面将页目录项0和0xc00都存为第一个页表的地址,
; 一个页表可表示4MB内存,这样0xc03fffff以下的地址和0x003fffff以下的地址都指向相同的页表,
; 这是为将地址映射为内核地址做准备
or eax, PG_US_U | PG_RW_W | PG_P ; 页目录项的属性RW和P位为1,US为1,表示用户属性,所有特权级别都可以访问.
mov [PAGE_DIR_TABLE_POS + 0x0], eax ; 第1个目录项,在页目录表中的第1个目录项写入第一个页表的位置(0x101000)及属性(3)
mov [PAGE_DIR_TABLE_POS + 0xc00], eax ; 一个页表项占用4字节,0xc00表示第768个页表占用的目录项,0xc00以上的目录项用于内核空间,
; 也就是页表的0xc0000000~0xffffffff共计1G属于内核,0x0~0xbfffffff共计3G属于用户进程.
sub eax, 0x1000
mov [PAGE_DIR_TABLE_POS + 4092], eax ; 使最后一个目录项指向页目录表自己的地址
;下面创建页表项(PTE)
mov ecx, 256 ; 1M低端内存 / 每页大小4k = 256
mov esi, 0
mov edx, PG_US_U | PG_RW_W | PG_P ; 属性为7,US=1,RW=1,P=1
.create_pte: ; 创建Page Table Entry
mov [ebx+esi*4],edx ; 此时的ebx已经在上面通过eax赋值为0x101000,也就是第一个页表的地址
add edx,4096
inc esi
loop .create_pte
;创建内核其它页表的PDE
mov eax, PAGE_DIR_TABLE_POS
add eax, 0x2000 ; 此时eax为第二个页表的位置
or eax, PG_US_U | PG_RW_W | PG_P ; 页目录项的属性RW和P位为1,US为0
mov ebx, PAGE_DIR_TABLE_POS
mov ecx, 254 ; 范围为第769~1022的所有目录项数量
mov esi, 769
.create_kernel_pde:
mov [ebx+esi*4], eax
inc esi
add eax, 0x1000
loop .create_kernel_pde
ret
;-------------------------------------------------------------------------------
;功能:读取硬盘n个扇区
rd_disk_m_32:
;-------------------------------------------------------------------------------
; eax=LBA扇区号
; ebx=将数据写入的内存地址
; ecx=读入的扇区数
mov esi,eax ; 备份eax
mov di,cx ; 备份扇区数到di
;读写硬盘:
;第1步:设置要读取的扇区数
mov dx,0x1f2
mov al,cl
out dx,al ;读取的扇区数
mov eax,esi ;恢复ax
;第2步:将LBA地址存入0x1f3 ~ 0x1f6
;LBA地址7~0位写入端口0x1f3
mov dx,0x1f3
out dx,al
;LBA地址15~8位写入端口0x1f4
mov cl,8
shr eax,cl
mov dx,0x1f4
out dx,al
;LBA地址23~16位写入端口0x1f5
shr eax,cl
mov dx,0x1f5
out dx,al
shr eax,cl
and al,0x0f ;lba第24~27位
or al,0xe0 ; 设置7~4位为1110,表示lba模式
mov dx,0x1f6
out dx,al
;第3步:向0x1f7端口写入读命令,0x20
mov dx,0x1f7
mov al,0x20
out dx,al
;;;;;;; 至此,硬盘控制器便从指定的lba地址(eax)处,读出连续的cx个扇区,下面检查硬盘状态,不忙就能把这cx个扇区的数据读出来
;第4步:检测硬盘状态
.not_ready: ;测试0x1f7端口(status寄存器)的的BSY位
;同一端口,写时表示写入命令字,读时表示读入硬盘状态
nop
in al,dx
and al,0x88 ;第4位为1表示硬盘控制器已准备好数据传输,第7位为1表示硬盘忙
cmp al,0x08
jnz .not_ready ;若未准备好,继续等。
;第5步:从0x1f0端口读数据
mov ax, di ;以下从硬盘端口读数据用insw指令更快捷,不过尽可能多的演示命令使用,
;在此先用这种方法,在后面内容会用到insw和outsw等
mov dx, 256 ;di为要读取的扇区数,一个扇区有512字节,每次读入一个字,共需di*512/2次,所以di*256
mul dx
mov cx, ax
mov dx, 0x1f0
.go_on_read:
in ax,dx
mov [ebx], ax
add ebx, 2
; 由于在实模式下偏移地址为16位,所以用bx只会访问到0~FFFFh的偏移。
; loader的栈指针为0x900,bx为指向的数据输出缓冲区,且为16位,
; 超过0xffff后,bx部分会从0开始,所以当要读取的扇区数过大,待写入的地址超过bx的范围时,
; 从硬盘上读出的数据会把0x0000~0xffff的覆盖,
; 造成栈被破坏,所以ret返回时,返回地址被破坏了,已经不是之前正确的地址,
; 故程序出会错,不知道会跑到哪里去。
; 所以改为ebx代替bx指向缓冲区,这样生成的机器码前面会有0x66和0x67来反转。
; 0X66用于反转默认的操作数大小! 0X67用于反转默认的寻址方式.
; cpu处于16位模式时,会理所当然的认为操作数和寻址都是16位,处于32位模式时,
; 也会认为要执行的指令是32位.
; 当我们在其中任意模式下用了另外模式的寻址方式或操作数大小(姑且认为16位模式用16位字节操作数,
; 32位模式下用32字节的操作数)时,编译器会在指令前帮我们加上0x66或0x67,
; 临时改变当前cpu模式到另外的模式下.
; 假设当前运行在16位模式,遇到0X66时,操作数大小变为32位.
; 假设当前运行在32位模式,遇到0X66时,操作数大小变为16位.
; 假设当前运行在16位模式,遇到0X67时,寻址方式变为32位寻址
; 假设当前运行在32位模式,遇到0X67时,寻址方式变为16位寻址.
loop .go_on_read
Weitere Einzelheiten finden Sie im Originalbuch.
Experimenteller Betrieb
1. Erstellen Sie das Kernelprogramm und aktualisieren Sie die vorherigen Dateien
(base) user@ubuntu:/home/cooiboi/bochs$ sudo mkdir kernel
[sudo] password for user:
(base) user@ubuntu:/home/cooiboi/bochs$ cd kernel/
(base) user@ubuntu:/home/cooiboi/bochs/kernel$ sudo vim main.c
(base) user@ubuntu:/home/cooiboi/bochs/include$ sudo vim boot.inc
(base) user@ubuntu:/home/cooiboi/bochs/boot$ sudo vim loader.S
2. Loader kompilieren.S
sudo nasm -I include/ -o boot/loader.bin boot/loader.S
(base) user@ubuntu:/home/cooiboi/bochs$ sudo nasm -I include/ -o boot/loader.bin boot/loader.S
3. Schreiben Sie mbr und laden Sie es auf die Festplatte
sudo dd if=/home/cooiboi/bochs/boot/mbr.bin of=/home/cooiboi/bochs/boot/hd60M.img bs=512 count=1 conv=notrunc
sudo dd if=/home/cooiboi/bochs/boot/loader.bin of=/home/cooiboi/bochs/boot/hd60M.img bs=512 count=3 seek=2 conv=notrunc
sudo dd if=/home/cooiboi/bochs/boot/loader.bin of=/home/cooiboi/bochs/boot/hd60M.img bs=512 count=3 seek=2 conv=notruncerklären:
- Die Suche ist 9, der Zweck besteht darin, die ersten 9 Sektoren (Sektoren 0 bis 8) abzudecken, und wir schreiben im 9. Sektor. Dies liegt daran, dass der MBR in Sektor 0 geschrieben wird und Sektor 1 leer und nicht beschrieben ist. Der Loader wird in Sektor 2 der Festplatte geschrieben. Der Loader belegt 3 Sektoren, sodass die Sektoren 2 bis 4 nicht mehr verwendet werden können. La. Es ist also ab Sektor 5 verfügbar.
- Die Anzahl beträgt 200 und der Zweck besteht darin, jeweils 200 Sektoren in die durch den Parameter angegebene Datei zu schreiben. [Zukünftige Kernelgröße wird 100 KB nicht überschreiten]
(base) user@ubuntu:/home/cooiboi/bochs/boot$ sudo dd if=/home/cooiboi/bochs/boot/mbr.bin of=/home/cooiboi/bochs/boot/hd60M.img bs=512 count=1 conv=notrunc
1+0 records in
1+0 records out
512 bytes copied, 0.000190907 s, 2.7 MB/s
(base) user@ubuntu:/home/cooiboi/bochs/boot$ sudo dd if=/home/cooiboi/bochs/boot/loader.bin of=/home/cooiboi/bochs/boot/hd60M.img bs=512 count=3 seek=2 conv=notrunc
3+0 records in
3+0 records out
1536 bytes (1.5 kB, 1.5 KiB) copied, 0.000253831 s, 6.1 MB/s
[Ergänzung] Der Befehl zum Erstellen von hd60M.img.
(base) user@ubuntu:/home/cooiboi/bochs/boot$ sudo /home/cooiboi/bochs/bin/bximage
Das erstellte hd60M.img befindet sich im Boot-Verzeichnis.
4. Kompilieren, verknüpfen und auf die Festplatte schreiben
sudo gcc -c -o kernel/main.o kernel/main.c
sudo ld kernel/main.o -Ttext 0xc0001500 -e main -o kernel/kernel.bin
sudo dd if=/home/cooiboi/bochs/kernel/kernel.bin of=/home/cooiboi/bochs/boot/hd60M.img bs=512 count=200 seek=9 conv=notrunc
- Verwenden Sie -Ttext im Link-Befehl ld, um die virtuelle Startadresse des Codesegments anzugeben.
(base) user@ubuntu:/home/cooiboi/bochs$ sudo gcc -c -o kernel/main.o kernel/main.c
(base) user@ubuntu:/home/cooiboi/bochs$ sudo ld kernel/main.o -Ttext 0xc0001500 -e main -o kernel/kernel.bin
(base) user@ubuntu:/home/cooiboi/bochs$ sudo dd if=/home/cooiboi/bochs/kernel/kernel.bin of=/home/cooiboi/bochs/boot/hd60M.img bs=512 count=200 seek=9 conv=notrunc
12+1 records in
12+1 records out
6232 bytes (6.2 kB, 6.1 KiB) copied, 0.000251117 s, 24.8 MB/s
Notiz: Der obige Befehl lässt den Verzeichniswechsel aus und gibt nur den Schlüsselcode und die Ergebnisse aus.
5. Starten Sie Bochs
sudo bin/bochs -f boot/bochsrc.disk
(base) user@ubuntu:/home/cooiboi/bochs$ sudo bin/bochs -f boot/bochsrc.disk
Es ist ein endloser Kreislauf~
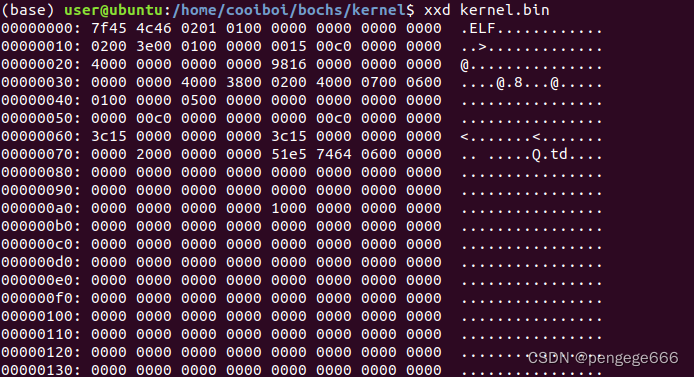
Die Kerneldatei kernel.bin ist eine binäre ausführbare Datei im Elf-Format. Mit xxd kernel.bindem Befehl können wir das Header-Format der Elf-Datei anzeigen.
Verweise
- „Wiederherstellung der Betriebssystemwahrheit“
- Kapitel 5 von „Operating System Restore the Truth“ ---- Reduzieren Sie ganz einfach die physische Speicherkapazität, aktivieren Sie Paging und reisen Sie durch den virtuellen Raum. Schneiden Sie den Kernel mit einer Axt ab und hacken Sie zuerst eine Ecke ab. Spazieren Sie herum und reden Sie darüber Berechtigungsstufen.