1. Baixe o Anaconda
Espelho Tsinghua: Índice de /anaconda/archive/ | Estação de espelho de software de código aberto da Universidade de Tsinghua | Espelho de código aberto Tsinghua

O Anaconda3-2023.03-Linux-x86_64.sh baixado é mostrado na figura:
 Clique com o botão direito na pasta e clique em Abrir no Terminal:
Clique com o botão direito na pasta e clique em Abrir no Terminal:

Digite a seguinte linha de comando:
bash Anaconda3-2023.03-Linux-x86_64.sh
Digite sim e pressione Enter

A seguir estão vários acordos, continue pressionando a tecla Enter para pular

Pare de pressionar Enter quando surgir uma nova pergunta

Digite sim e pressione Enter

Pressione a tecla Enter para selecionar o diretório de instalação padrão (por padrão, uma pasta chamada anaconda3 é criada no diretório inicial do usuário como endereço de instalação) e aguarde a conclusão da instalação
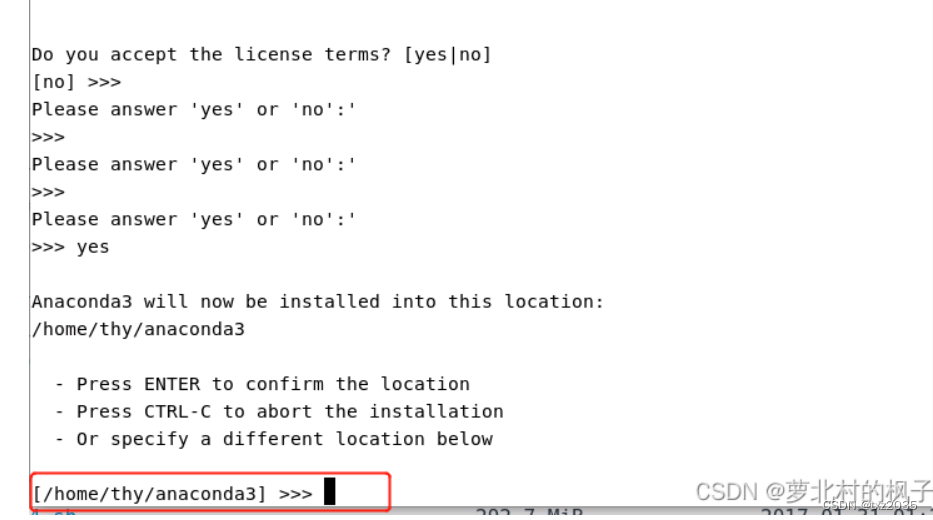
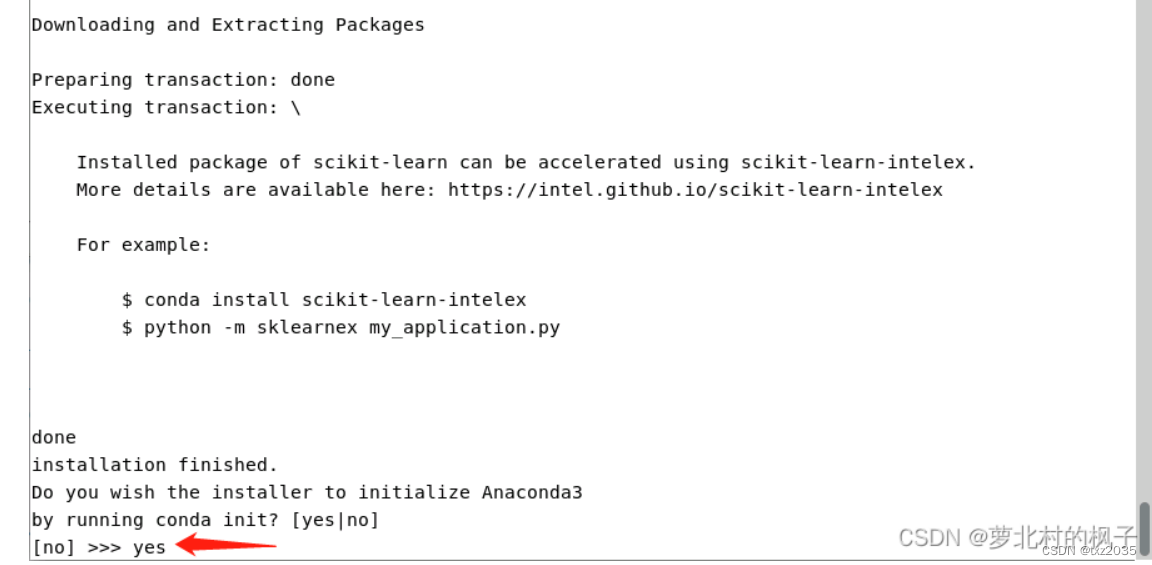
Digite sim e pressione Enter ( pressione não!!!! )
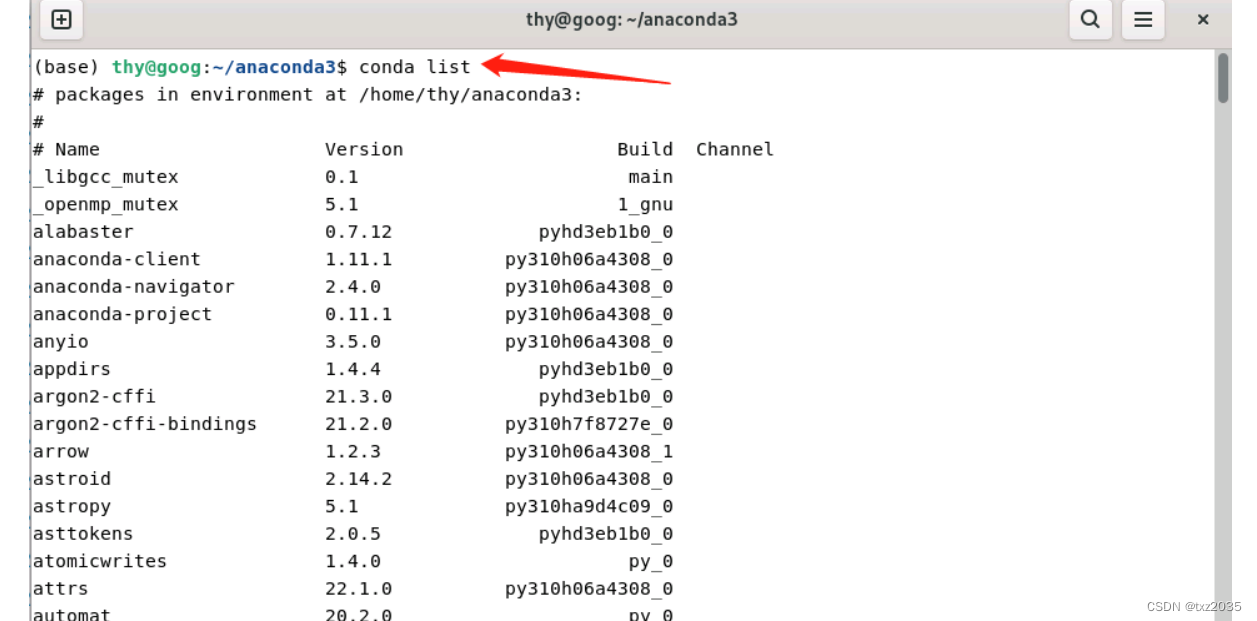
Entre na lista conda, você pode ver o pacote instalado pelo anaconda e verificar se a instalação do anaconda foi concluída
Segundo, baixe o pycharm
https://www.jetbrains.com/pycharm/

Selecione a versão Linux para baixar
terminal aberto
Observe que a versão é instalada de acordo com sua própria versão
Digite na ordem: Se houver um erro, significa que o caminho de download do seu pacote compactado não está em Downloads, encontre o pacote compactado e faça o CD dele você mesmo
downloads de CDs
sudo tar -xvf pycharm-community-2022.3.3.tar.gz -C /opt/
Após a conclusão da descompressão
cd /opt/pycharm-community-2021.1.1/bin/
./pycharm.sh
Terceiro, crie um ambiente virtual
criar criar -n openpcdet python=3.8
Ative o ambiente virtual:
conda ativar openpcdet
Cada versão corresponde a pytorch e torchvision:
Versões anteriores do PyTorch | PyTorch
Instale o pytorch
pip instalar tocha==1.8.1+cu111 torchvision==0.9.1+cu111 torchaudio==0.8.1 -f https://download.pytorch.org/whl/torch_stable.html -i https://pypi.tuna .tsinghua.edu.cn/simple
Verifique se a instalação foi bem-sucedida:
python
importar tocha
print(torch.__version__)
print(torch.cuda.is_available())
Quarto, baixe o cmake: o endereço oficial de download é: https://cmake.org/download/
tar -xvzf cmake-3.22.4-linux-x86_64.tar.gz
sudo mv cmake-3.22.4-linux-x86_64 /opt/cmake-3.22.4
# Crie um link virtual
sudo ln -sf /opt/cmake-3.22 .4/bin/* /usr/bin/
Verifique a versão do cmake:
cmake --versão

Cinco, instale spconv
Ver versão:
nvidia-smi
Versão CUDA: 12.0
espelhos / traveller59 / spconv · GitCode
pip instalar spconv-cu120
clone git https://github.com/traveller59/spconv.git --recursive
cd spconv/
pip instalar pccm
python setup.py bdist_wheel
cd ./dist
pip install * -i https://pypi.tuna.tsinghua.edu.cn/simple
Verifique se a instalação foi bem-sucedida:

Sexto, baixe OpenPCDet e instale dependências
Crie uma pasta e abra uma janela de comando na pasta
git clone https://github.com/open-mmlab/OpenPCDet.gitAtive o ambiente virtual: conda activate openpcdet
Insira o caminho onde os requisitos estão localizados:
cd dianyun
CD OpenPCDet
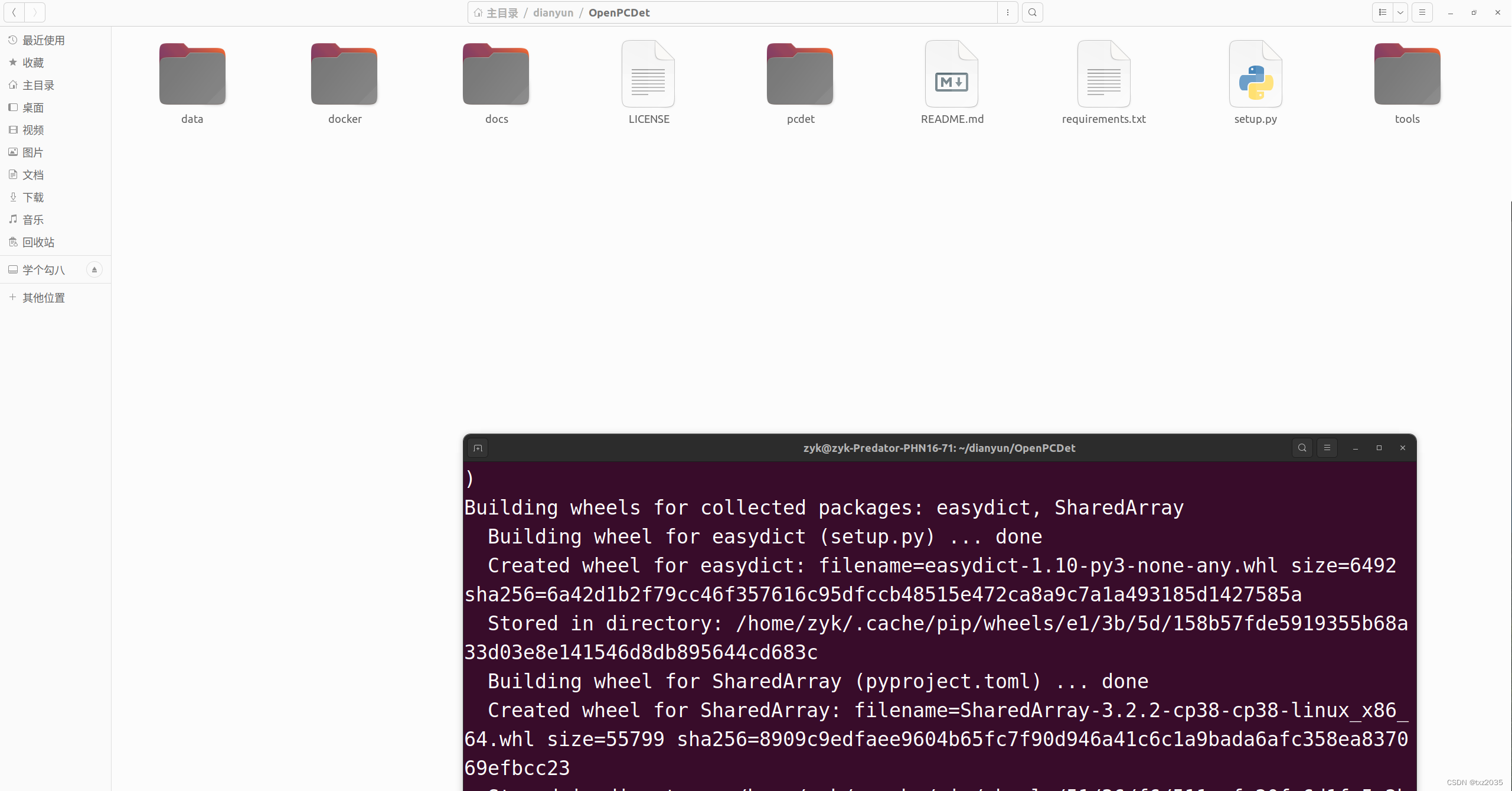
Baixe dependências:
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple

implemento:
python setup.py develop Verifique se a instalação foi bem-sucedida:
importação python pcdet
Sete: treinamento e teste de kitti
preparar dados
1. Estabeleça uma conexão suave
cd OpenPCDet/data/kitti
ln -s /home/zyk/desktop/kitti_3D/training training
ln -s /home/zyk/desktop/kitti_3D/testing
formato do conjunto de dados
├── ImageSets
│ ├── test.txt
│ ├── train.txt
│ └── val.txt
├── teste -> /home/zyk/desktop/kitti_3D/testing teste
└── treinamento ->/home /zyk/desktop/kitti_3D/treinamento# treinamento
├── calibre
├── imagem_2
├── rótulo_2
└── velodyne
# teste
├── calibre
├── imagem_2
└── velodyne
pré-processamento de dados
2. Prepare os dados:
gere o arquivo pkl de dados e a pasta gt_database
abra o comando aqui
Ative o ambiente:
python -m pcdet.datasets.kitti.kitti_dataset create_kitti_infos ferramentas/cfgs/dataset_configs/kitti_dataset.yaml
Sete, treinamento de teste
Veja a demonstração como exemplo
ferramentas de CD
python demo.py --cfg_file cfgs/kitti_models/pv_rcnn.yaml --ckpt ckpts/kitti/pv_rcnn_8369.pth --data_path /home/neo/data/kitti/vel/000000.bin
Ou abra o pycharm e altere esses caminhos de arquivo
'--cfg_file', type=str, default=r'/home/zyk/OpenPCDet/tools/cfgs/kitti_models/pointpillar.yaml'
'--data_path', type=str, default=r'/home/zyk/OpenPCDet/data/kitti/testing/velodyne/000009.bin'
'--ckpt', type=str, default=r'/home/zyk/OpenPCDet/tools/pointpillar_7728.pth', help='specify the pretrained model') 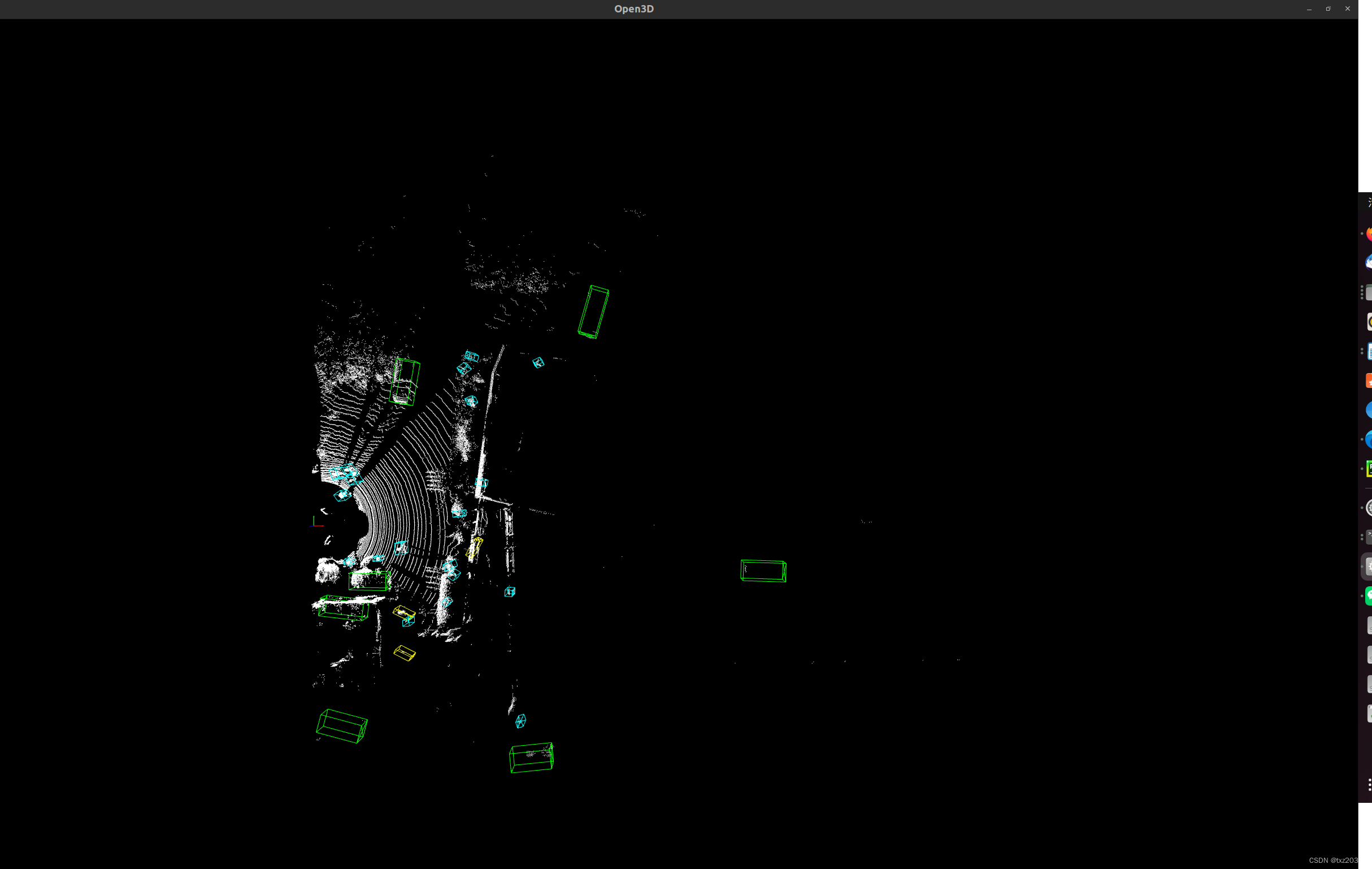
Reproduzir pilar:
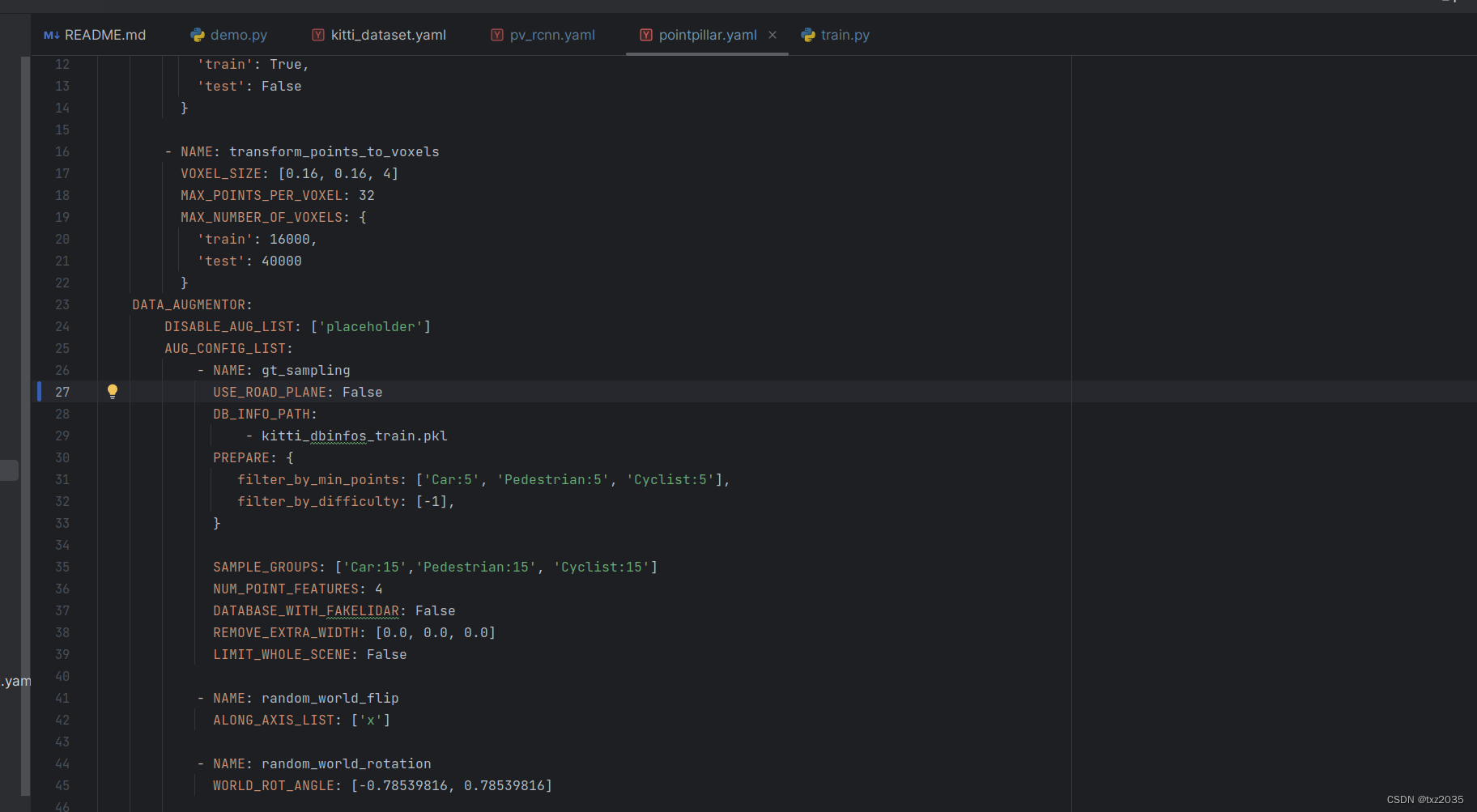
Erro: KeyError: 'road_plane'
Se não houver dados de roadplane, defina o campo USE_ROAD_PLANE em pointpillar.yaml:
USE_ROAD_PLANE: False
Observe a função de perda:
pip instalar tensorboardX
pip instalar tensorflow
Em seguida, abra o terminal para ativar o ambiente virtual do pcdet em /home/juzhen/OpenPCDet/output/cfgs/kitti_models/pointpillar_pyramid_aug/default/tensorboard (ou seja, na pasta events.out.tfevents.) e digite:
Mude para o seu próprio:
tensorboard --logdir= /home/juzhen/OpenPCDet/output/cfgs/kitti_models/pointpillar_pyramid_aug/default/tensorboard


Clique com o botão direito para abrir a URL na caixa vermelha para visualizar a visualização da função de perda durante o processo de treinamento (basta clicar nela): http://localhost:6006/

Se o conteúdo for útil para você, curta, obrigado!
Consulte o link original: Etapas detalhadas do Ubuntu para instalar o Anaconda (Ubuntu22.04.1, Anaconda3-2023.03)_ubuntu anaconda_Luobei Village's Fengzi's Blog-CSDN Blog