Índice
1. A teoria básica do algoritmo PID
1.1 Conceito básico de controle PID
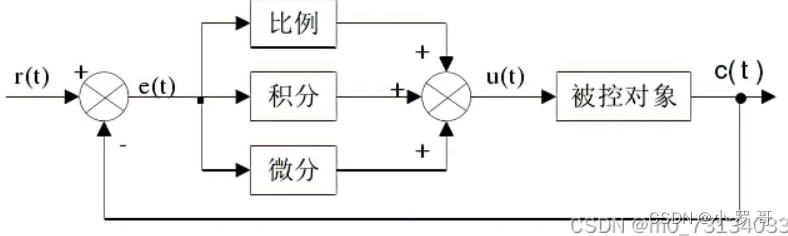
1.3 Diagrama esquemático do sistema de controle PID
2. Construa um modelo de controlador PID e ajuste os parâmetros no simulink
1. A teoria básica do algoritmo PID
1.1 Conceito básico de controle PID
O controlador PID é um controlador paralelo proporcional, integral e diferencial. É o tipo de controlador mais utilizado. No controlador PID, seu modelo matemático é composto por três partes: proporcional, integral e diferencial.
1.2 Fórmula básica
O controle PID é um tipo de controle linear, que é o desvio de controle composto pelo valor dado e o valor real:
A proporção (P), integral (I) e diferencial (D) da combinação linear formam a quantidade de controle, e o objeto controlado é controlado. Sua expressão de simulação é:
em:
Uma saída do controlador.
Uma entrada do controlador, que é a diferença entre o valor dado e o valor de saída do objeto controlado, chamado de sinal de desvio.
Um fator de escala para o controlador.
Tempo integral de um controlador.
Tempo derivado de um controlador.
A forma da função de transferência é:
Na fórmula acima, é o coeficiente proporcional,
é a constante de tempo integral e
é a constante de tempo diferencial.
1.3 Diagrama esquemático do sistema de controle PID
2. Construa um modelo de controlador PID e ajuste os parâmetros no simulink
Xiao Luoge usará dois métodos diferentes no simulink para construir um controlador PID para controlar um sistema simples de segunda ordem.
Sem adicionar nenhum controlador, podemos ver que este sistema tem um tempo de estabilização mais lento e picos mais altos.
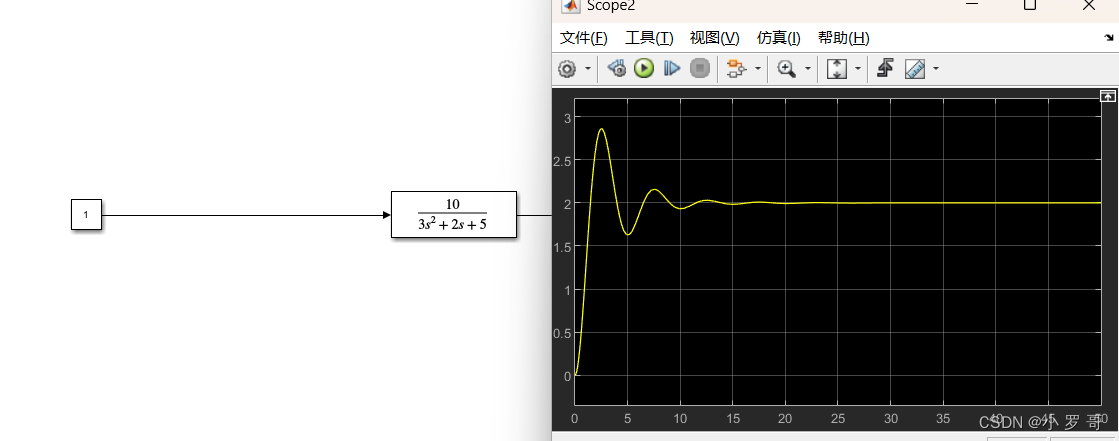
(1) O primeiro método é usar os módulos Gain, Integrator e Derivative fornecidos pelo simulink para formar um controlador PID e, em seguida, usar o módulo Transfer Fcn para fornecer a função de transferência. O resultado final pode ser observado usando o módulo Scope. o sistema, nós inserimos o sinal 1.
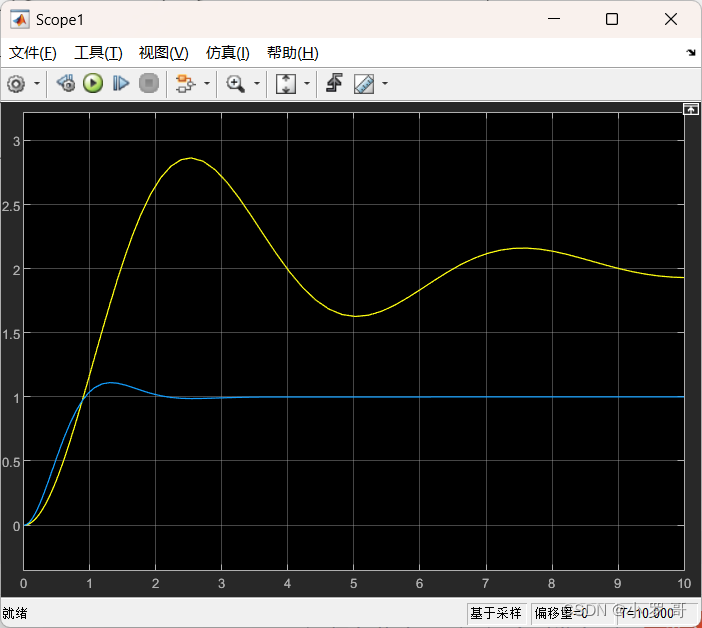
Na parte superior da função de transferência na figura, o PID não é usado para controle. Pode ser visto claramente pelos resultados que o controle PID melhorou muito para todo o controle, atendendo aos nossos requisitos para um controle rápido, estável e preciso sistema.

Usar este método para construir um controlador é relativamente primitivo e também requer uma certa experiência e tempo ao ajustar os parâmetros. Ao ajustar os parâmetros, geralmente defino os links integral e diferencial para zero primeiro, ajusto o link proporcional primeiro e depois faça a ligação diferencial Ajuste a integral para zero e coloque a derivada por último.
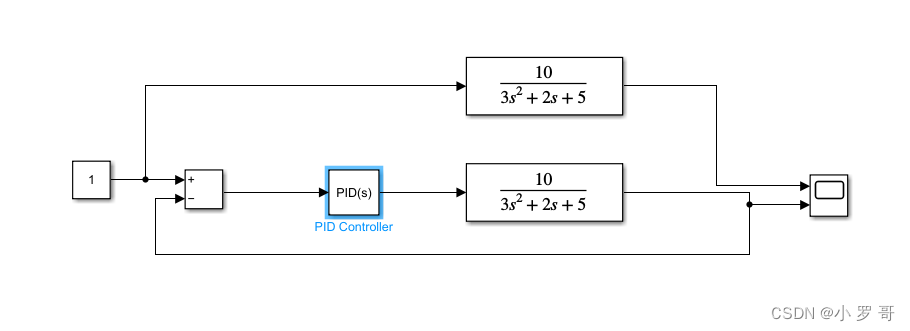
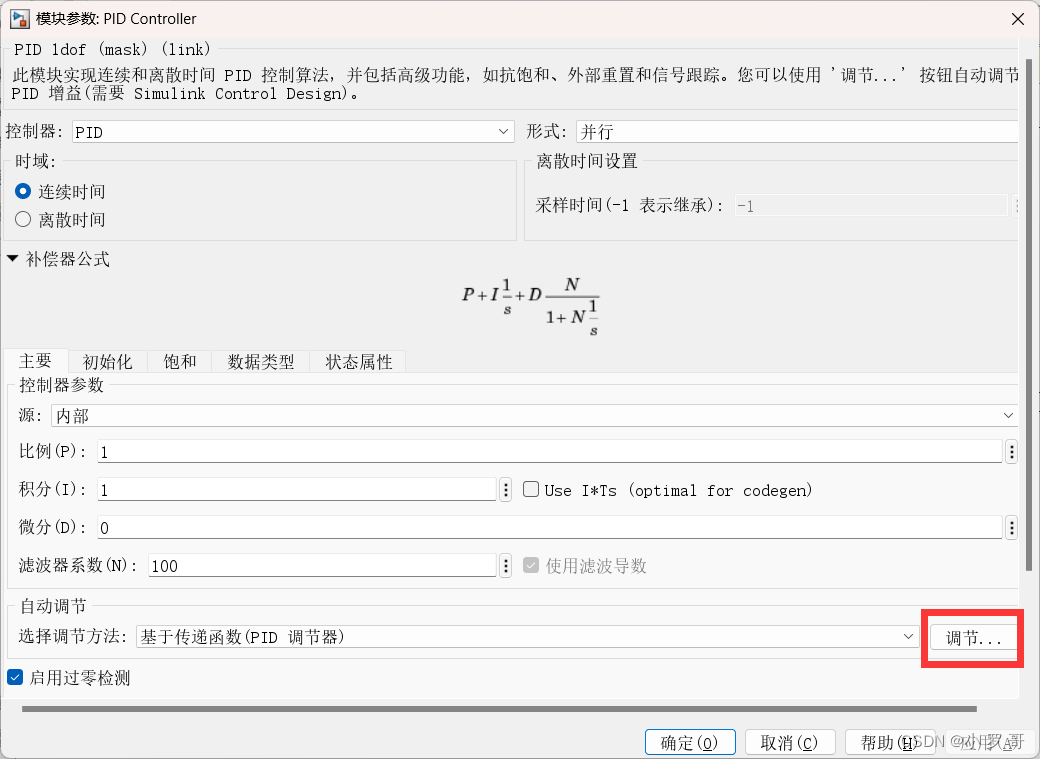
(2) Use o módulo de controle PID que vem com o simulink.
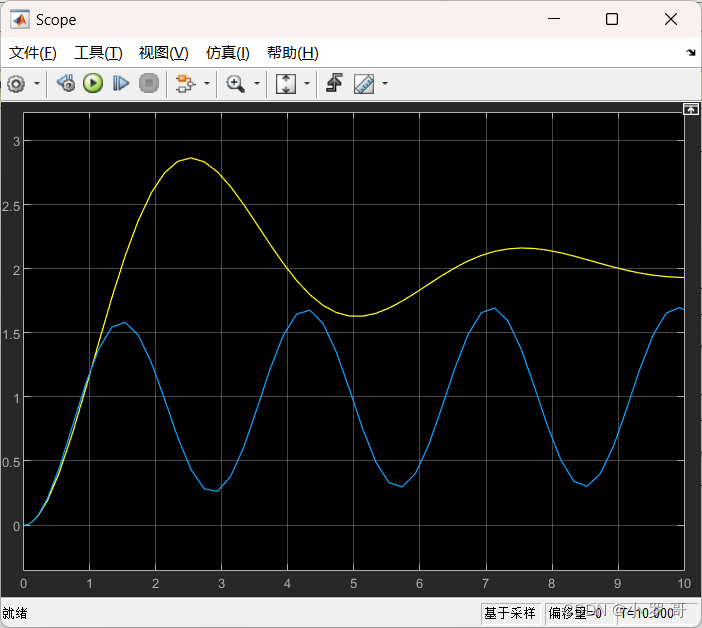
O método (1) é bastante problemático para quem é novo no PID, então podemos usar o módulo PID para controle no simulink.A única vantagem deste módulo é que ele pode ajustar os parâmetros automaticamente. A função de transferência na parte superior da figura é o sistema de controle sem usar nenhum controlador, enquanto na parte inferior usamos o controlador PID Controller.
Podemos ver que a linha azul é o gráfico onde usamos o módulo PID sem nenhum ajuste de parâmetro.
Aqui podemos clicar duas vezes no módulo PID, optar por clicar no botão de ajuste no ajuste automático, MATLAB pode ser um pouco lento ao abrir a interface de ajuste, aguarde pacientemente.
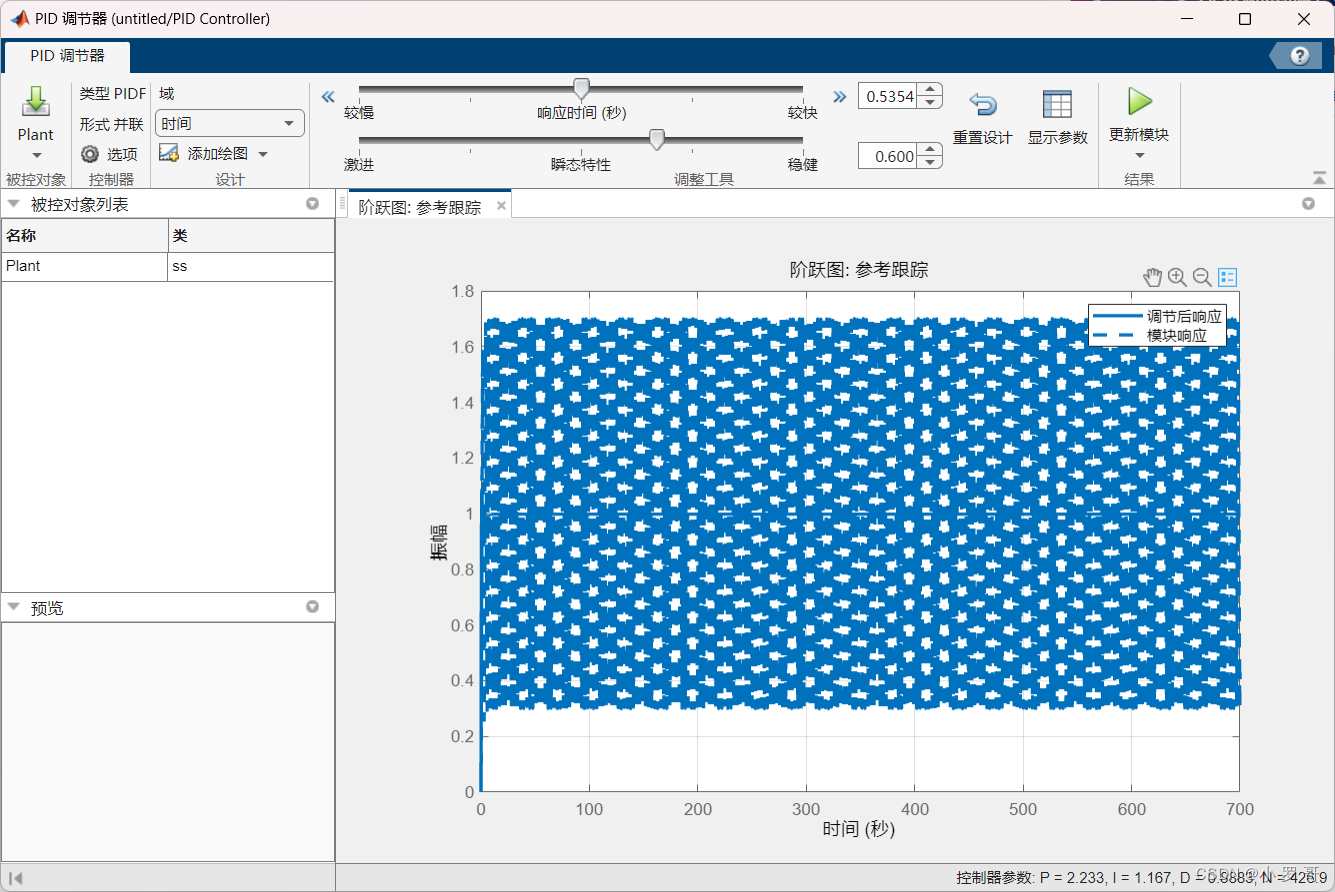
Aqui, podemos clicar em Reset Design para ajustar automaticamente os parâmetros. Você pode ver que a linha pontilhada é a curva sem nenhum ajuste em nosso sistema original, e a linha sólida é a curva obtida usando o algoritmo PID. Nesta interface, nós também pode ajustar intuitivamente o tempo de resposta e as características transitórias, após a conclusão do ajuste, só precisa clicar para atualizar o módulo

De volta à interface de configuração do módulo PID, podemos ajustar P, I ou D. No final do artigo, tenho uma nova experiência no ajuste de parâmetros. Se houver deficiências, por favor, critique e corrija-me.

3. Ajuste os parâmetros
Ao ajustar os parâmetros, costumo definir os links integral e diferencial para zero primeiro, ajustar o link proporcional primeiro, depois ajustar o integral para zero e colocar o diferencial no final.
(1) Link proporcional: Reflete o sinal de desvio e(t) do sistema de controle em proporção. Uma vez que o desvio ocorre, o controlador imediatamente tem um efeito de controle, fazendo com que a quantidade de controle mude na direção de reduzir o desvio. A força da ação de controle depende da proporção Quanto maior o coeficiente ,
mais curto o processo de transição e menor o erro de estado estacionário do resultado do controle; mas
quanto maior o valor, maior o overshoot, mais fácil é gerar completo vibração, o que levará a um desempenho dinâmico pior e até mesmo tornará o sistema de malha fechada instável. Portanto, o coeficiente proporcional
deve ser selecionado adequadamente para obter o efeito de menos tempo de transição, pequeno erro de estado estacionário e estabilidade.
(2) Link integral: É usado principalmente para eliminar desvios.Enquanto houver desvios, seu efeito de controle continuará a se acumular e as quantidades de controle de saída para eliminar desvios. Pode-se ver que a função da parte integral pode eliminar o desvio do sistema. No entanto, a ação integral tem características de histerese.Se a ação de controle integral for muito forte, o overshoot do sistema aumentará, o desempenho dinâmico do controle se deteriorará e até mesmo o sistema de malha fechada ficará instável. O tempo de integração tem grande influência na ação da parte integral. Quando
maior, a ação integral é mais fraca, neste momento é benéfico reduzir o overshoot do sistema, e o processo de transição não é fácil de gerar oscilação. Mas leva muito tempo para eliminar o erro.
Quando é menor, o efeito integral é mais forte. Neste momento, pode ocorrer oscilação durante a transição do sistema, e o tempo necessário para eliminar o erro é relativamente curto.
(3) Link de diferenciação: reflete a tendência de variação do sinal de desvio, e a tendência de variação do desvio pode ser obtida pelo controle diferencial. Aumentar a função de controle diferencial pode acelerar a resposta do sistema, reduzir o overshoot, superar a oscilação, e melhorar a estabilidade do sistema, mas o sistema reduziu a capacidade de suprimir a interferência. A força da parte diferencial é determinada pelo tempo diferencial.
Quanto maior,
mais forte é o seu efeito de inibição da mudança, e quanto menor, mais fraco
o seu efeito de resistência à mudança.
Tem um grande impacto na estabilidade do sistema.