0 1 Descreva resumidamente os componentes básicos do ADCU (controle de domínio)?
MCU, SOC, desserializador, transceptor CAN, switch de rede, chip de módulo de gerenciamento de energia PMIC, etc.
0 2 Qual é a diferença entre MCU e SOC? Quais são os principais cenários de aplicação?
-
MCU é o chip de controle principal, e o chip MCU tradicional é usado principalmente para o chip de controle principal nos domínios que não requerem alto poder de computação, como o domínio do chassi e o domínio do corpo;
-
SOC é um chip de computação que integra CPU, GPU de processamento de imagem, DSP de processamento de áudio, unidade de aceleração de aprendizagem profunda NPU, memória e várias interfaces de E/S.
Considerando que o domínio do cockpit inteligente e o domínio de direção inteligente têm requisitos extremamente altos de poder de computação e segurança, o chip de controle principal do controlador geralmente escolhe o chip SOC para ser usado em conjunto com o chip MCU.
0 3 Descreva resumidamente o processo de implementação do software de controle de domínio ADAS?
O sistema de software do controlador é composto pelo sistema operacional inferior, o software da camada intermediária e o software de aplicação da camada superior.
Entre eles, o sistema operacional subjacente e o software da camada intermediária são fornecidos principalmente por fabricantes de controladores de domínio ou fornecedores de plataforma de software. A camada de aplicação superior possui maior grau de liberdade, podendo ser desenvolvida pelo próprio OEM ou encomendada por uma empresa terceirizada.
Finalmente, toda a camada de software é integrada e gravada no hardware do controlador de domínio. Após adaptação e calibração com todo o veículo, funções e cenários de direção inteligentes podem ser realizados no lado do veículo.
0 4 Como é calculado o TTC?
0 5 Quais são os requisitos de desempenho de saída do radar?
1. O ID de destino deve permanecer estável.
①O mesmo alvo deve ter apenas um ID;
②Quando o alvo está dentro do FOV sem interferência de oclusão, o mesmo ID deve ser mantido sem pular, independentemente de mudar de estático para dinâmico ou dinâmico para estático.
2. A saída da posição do alvo deve ser consistente com o movimento real do alvo e não deve haver situações anormais, como salto de posição e perda.
3. Quando o veículo autônomo passa por obstáculos como veículos estacionados na beira da estrada, paredes, grades de proteção, canteiros de flores, etc., o radar não deve produzir imagens fantasmas e é necessário garantir um rastreamento estável e preciso de outros alvos em movimento .
4. Quando o radar frontal detecta um alvo dinâmico, o erro de distância não deve exceder ±0,4m no modo de longa distância, ±0,1m no modo de curta distância, e o erro de velocidade não deve exceder ±0,1kph. Para detecção de radar de ângulo, o erro de distância não deve ser superior a ± 0,25 m e o erro de velocidade não é superior a ± 0,18 km / h.
5. A distância de erro de saída entre a posição central do alvo e a posição real do centro geométrico do alvo não excede ±0,1m, e a longa distância não excede ±0,25m.
0 6 Quando a câmera frontal detecta um alvo dinâmico durante o teste, qual é o requisito de precisão de medição do dispositivo de aquisição?

0 7 Quais são as condições inibitórias comuns do AEB?
Excesso de velocidade do veículo: Quando a velocidade do veículo ultrapassa um determinado valor, o sistema AEB pode ser inibido para evitar freadas bruscas ao dirigir em alta velocidade, causando situações perigosas.
Obstáculos muito afastados: Os sistemas AEB podem ser inibidos quando os obstáculos estão muito afastados do veículo, pois neste caso não é necessário frear.
Obstáculos não podem ser reconhecidos: Quando a forma, tamanho ou cor do obstáculo não for fácil de reconhecer, o sistema AEB pode ser suprimido para evitar frenagens desnecessárias se for reconhecido erroneamente como um obstáculo.
Falha do sensor: Quando um sensor do sistema AEB falha ou falha, o sistema AEB pode inibir.
Observações: As condições de supressão do sistema AEB são definidas pelo OEM e podem ser diferentes, portanto, ao usar o sistema AEB, ele deve ser testado de acordo com os requisitos.
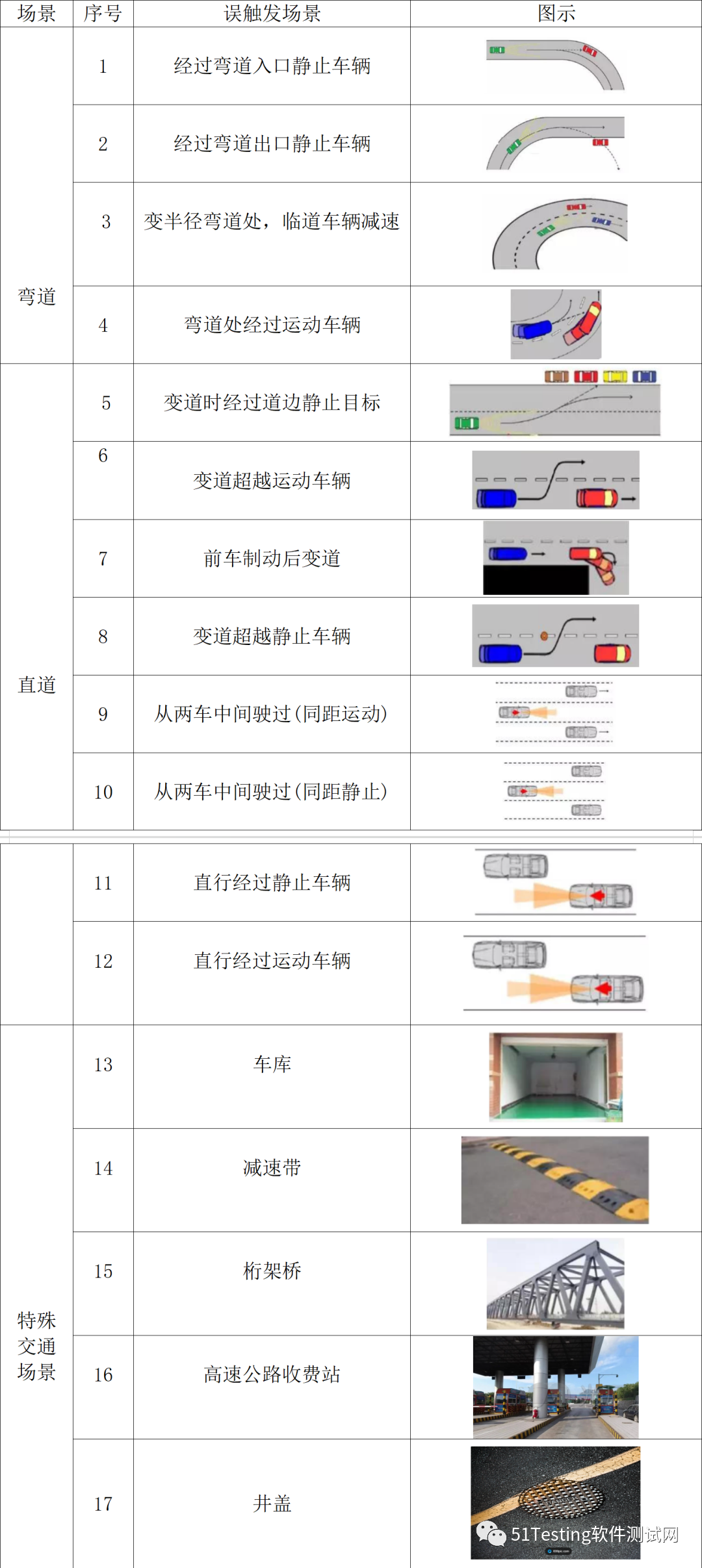
0 8 Quais são os cenários em que o AEB é disparado falsamente?
0 9 Qual a diferença entre MIL/SIL/HIL na fase de teste?
Se o objeto em teste for apenas um algoritmo em estágio de desenvolvimento, então apenas MIL/SIL pode ser usado; se o objeto em teste for um controlador para ser usado em um veículo real, pode ser necessário um conjunto de equipamentos HIL para testar em antecedência para encontrar problemas com antecedência.
comunicação
0 1 Quais são os dois mecanismos de comunicação ros?
-
Mecanismo de publicação-assinatura entre nós;
-
Mecanismo de solicitação-resposta cliente-servidor.
0 2 A qual camada o UDS pertence? Como os dados são transferidos?
O serviço de diagnóstico UDS está localizado na camada de aplicativo e a camada de rede está abaixo da camada de aplicativo, portanto, os dados de diagnóstico são enviados da camada de aplicativo para a camada de rede e os dados são descompactados, empacotados e transmitidos pela rede camada.
relacionado a CAN
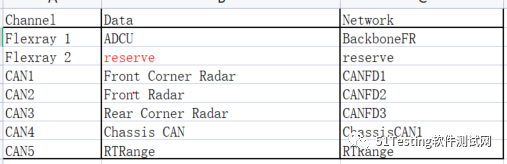
Quais são os canais CAN comumente usados no teste 0 1 ? Como são mapeados os canais lógicos e os canais físicos?
Exemplo: definido de acordo com o padrão unificado.
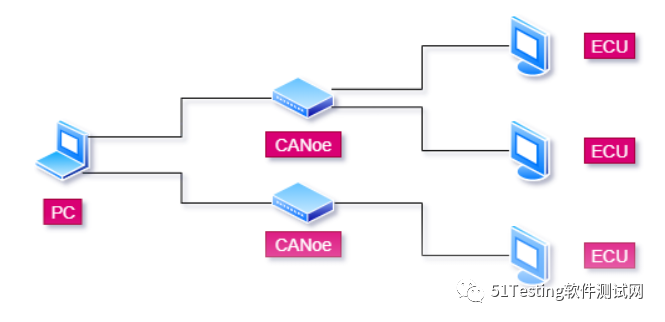
0 2 Como conectar CANoe, como conectar com ECU, que tipo de interface? Quais ECUs precisam ser conectadas durante o teste?
ECU geralmente leva do carro, incluindo chassi CAN, corpo CAN, FlexRay, radar, etc. para CANoe, e CANoe é conectado ao computador. A interface é geralmente a cabeça do DB9 ou o conector extraído do OBD no carro .
0 3 Qual a diferença entre segurança ativa e segurança passiva Quais são os dispositivos?
Segurança passiva refere-se a dispositivos de segurança que podem minimizar lesões pessoais após um acidente de trânsito. A segurança passiva não pode prevenir ou evitar acidentes, mas pode minimizar lesões pessoais quando um acidente ocorre.Dispositivos de segurança passiva comuns incluem airbags e cintos de segurança.
A segurança passiva não é suficiente para a segurança do automóvel. Para prevenir/evitar/reduzir ao máximo a ocorrência de acidentes de segurança,
Uma série de projetos de segurança adotados em automóveis para prevenir acidentes são chamados de projetos de segurança ativa. A segurança ativa é principalmente prevenir os problemas antes que eles aconteçam e trabalhar antes dos acidentes para reduzir os acidentes. Por exemplo, o sistema de travagem anti-bloqueio ABS evita que o carro bloqueie e derrape; o sistema eletrónico de estabilidade ESP torna o carro mais estável ao rodar e virar.
calibração
0 1 Qual é a diferença entre referência interna e referência externa?
A referência interna refere-se às propriedades inerentes do próprio sensor, como a distância focal da câmera e a distorção da lente.
Os parâmetros externos são usados principalmente para unificar o sistema de coordenadas entre os diferentes sensores (Câmera, Lidar, Radar) do veículo.
0 2 Os parâmetros internos e externos precisam ser calibrados sozinhos?
Normalmente, apenas a referência externa é necessária e a referência interna é calibrada pelo fornecedor.
coleção de dados
0 1 Quantos carros tem o Datalogging? Quanta milhagem é coletada em um único dia? Qual é a duração do ciclo de coleta?
Exemplo: Existem 3 veículos de recolha, 300-400km/veículo são recolhidos todos os dias, e o período de recolha é de cerca de 3 meses.
0 2 Quais cenas são abordadas pela coleção?
-
Período de tempo: dia, tarde, noite;
-
Tempo: ensolarado, nublado, chuvoso e com neve;
-
Veículos: caminhões de grande porte, veículos de engenharia, ônibus, automóveis, SUVs, picapes, motocicletas, veículos de trabalho, veículos de acidentes, veículos com formatos especiais;
-
VRU: pedestres, crianças, ciclistas;
-
Principais cenários: túneis, pontes, rampas, curvas de grande curvatura, rampas e estradas elevadas.
0 3 Qual é a diferença entre a câmera de visão lateral e a câmera de visão surround para coleta?
Exemplo: Do ponto de vista funcional, as lentes olho de peixe são distribuídas nas quatro direções da carroceria do carro, dianteira, traseira, esquerda e direita, e são usadas principalmente para cenas de estacionamento.
A câmera de visão lateral é dividida em visão frontal esquerda/visão frontal direita/visão traseira esquerda/visão traseira direita, que são usadas principalmente para funções de assistência à direção, como DOW, LCA, etc.
Finalmente: O tutorial completo em vídeo de teste de software abaixo foi organizado e carregado, e os amigos que precisam podem obtê-lo por conta própria [Garantido 100% gratuito]

Documentação da entrevista de teste de software
Devemos estudar para encontrar um emprego bem remunerado. As perguntas da entrevista a seguir são os materiais de entrevista mais recentes de empresas de Internet de primeira linha, como Ali, Tencent e Byte, e alguns chefes da Byte deram respostas confiáveis. Termine este conjunto Os materiais da entrevista acreditam que todos podem encontrar um emprego satisfatório.

