prefácio
Um resumo de alguns conhecimentos básicos conceituais para a revisão de fim de período dos princípios do microcomputador.
contente
(1) Quais são as semelhanças e diferenças entre microprocessadores, microcomputadores e sistemas de microcomputadores?
(1) A CPU (unidade de computação e controlador) é construída em um chip usando tecnologia de circuito integrado de larga escala, que é um microprocessador .
(2) Um microprocessador mais uma certa quantidade de memória e dispositivos externos (ou interfaces de dispositivos externos) constituem um microcomputador (isto é, um microcomputador) . (3) O sistema de microcomputador
é formado pela combinação do microcomputador com o software para gerenciamento e manutenção de hardware de computador e aplicativos de suporte .
(2) Descreva brevemente a composição do hardware e as funções de cada parte do sistema do microcomputador
(1) Unidade aritmética (ALU): O núcleo da unidade aritmética é a unidade lógica aritmética, que é um componente que completa várias operações aritméticas e de metal puro.
(2) Controlador (CU): Um componente que envia várias informações de controle para coordenar o trabalho de vários componentes do computador.
(3) Memória (M): Um componente que armazena programas e dados.
(4) Dispositivo de entrada (IN): Um componente que insere programas e dados.
(5) Dispositivo de saída (OUT): Um componente que emite dados de resultados e outras informações.
(3) Qual é o conceito básico de barramento de microcomputador? Quais são os tipos de barramento do microcomputador? Quais são as características da estrutura do ônibus?
(1) Conceito: O chamado barramento é a linha comum que conecta componentes e transmite informações.
(2) Tipo: barramento de endereço, barramento de dados, barramento de controle.
(3) Características: estrutura simples, alta confiabilidade, fácil design, produção e manutenção e, mais importante, fácil expansão.
(4) Quais são os sistemas numéricos dos computadores? Como converter o sistema numérico? Converter um número decimal em binário e hexadecimal: 128
(1) Sistema numérico: binário, octal, decimal, hexadecimal.
(2) Conversão do sistema numérico: Ao dividir continuamente pelo sistema de destino, o resto e o quociente são obtidos até que o quociente seja 0. Organize o restante de baixo para cima para obter o valor alvo.
(3)
Binário de <1>128:

,<2>128 hexadecimais:

(5) De quais partes a CPU consiste em sua estrutura interna?
A estrutura interna da CPU é composta de várias partes, como uma unidade aritmética, um controlador, uma matriz de registradores e um barramento interno.
(6) Quais são as funções dos componentes de interface de barramento da CPU? Quais são as funções da unidade de execução da CPU?
(1) Componentes de interface: Responsáveis pela transmissão de dados entre a CPU e a memória, dispositivos de entrada e saída.
(2) Unidade de execução: Responsável por executar o conjunto de instruções da CPU.
Quais são os registradores no microprocessador 8086/8088? Quais dos registradores de uso geral podem ser usados como ponteiros de endereço?
8 registradores de uso geral: AX, BX, CX, DX, SP, BP, SI, DI.
2 registradores de ponteiro: SP, BP.
4 registradores de endereço de segmento: DS, ES, SS, CS.
(7) Descreva resumidamente o significado e a função de cada bit do registrador de flag 8086CPU
- CF (Carry Flag): Sinalizador de carry, usado para indicar se ocorre carry ou lend em operações aritméticas sem sinal.
- PF (Parity Flag): Bit de flag de paridade, utilizado para indicar se o número de 1s no resultado da operação é par ou ímpar.
- AF (Auxiliary Carry Flag): Bit auxiliar de carry flag, usado para indicar o carry baixo para alto na operação aritmética BCD (decimal codificado em binário).
- ZF (Zero Flag): Flag zero, utilizado para indicar se o resultado da operação é zero.
- SF (Sign Flag): Bit sinalizador de sinal, que é utilizado para indicar o sinal do resultado da operação. Se o resultado for negativo, SF é definido como 1, caso contrário, é definido como 0.
- TF (Trap Flag): Bit do sinalizador de trap, usado para fins de depuração, quando definido como 1, a CPU gera uma interrupção após a execução de cada instrução.
- IF (Interrupt Flag): O bit flag de interrupção é usado para controlar a resposta da UCP a interrupções mascaráveis, quando definido como 1, permite a resposta a interrupções mascaráveis.
- DF (Direction Flag): O bit do sinalizador de direção é usado para controlar a direção da operação da string. Quando é definido como 1, a operação da string é executada do endereço alto para o endereço baixo, caso contrário, é 0.
- OF (Sinalizador de estouro): O bit de sinalizador de estouro é usado para indicar se a operação aritmética com sinal estourou.
(8) Vários modos de endereçamento de 8086 e escreva 2 ou 3 instruções de transferência para cada modo de endereçamento.
(1) Endereçamento imediato
MOV AX, 1234h
MOV BX, 2244h
(2) Endereçamento de registro
MOV AX, BX
MOV BX, AX
(3) Registrar endereçamento indireto
MOV AX, [BX]
MOV BX, [AX]
(4) Registrar endereçamento relativo
MOV AX, [BX+3]
MOV AX, 3[BX]
(5) Endereçamento direto
MOV AX, [1234h]
MOV BX, [1234h]
(6) Endereçamento indexado de endereço base
MOV AX, [1234h]
MOV BX, [1234h]
(7) Endereçamento relativo indexado por base
MOV AX, [BX+SI+4]
MOV BX, [BP+DI+4]
(9) Características do barramento PCI
(1) Excelente alto desempenho, realiza a operação síncrona de 33MHZ e 66MHZ, a velocidade de transmissão pode chegar a 528Mb/s e suporta transmissão em rajada.
(2) Boa compatibilidade de software e hardware, suportando vários processadores.
(3) Suporte plug and play, suporte a dispositivos multi-master.
(4) Fornece função de verificação de paridade de dados e endereço para garantir a integridade dos dados.
(5) Chips ideais e linhas de sinal multiplexadas são usadas e o custo é baixo.
(10) Descreva brevemente a relação entre o barramento AGP e o barramento PCI
(1) O padrão AGP é totalmente compatível com o padrão PCI, e um dispositivo AGP pode trocar dados com memória por meio do padrão AGP e do padrão PCI.
(2) AGP é uma expansão e aprimoramento do PCI.
(3) AGP não é uma versão atualizada do PCI, seu slot não é compatível com PCI.
(11) Descreva resumidamente as características e aplicações do barramento USB
Características:
(1) Com recurso plug and play.
(2) Os periféricos podem ser vinculados e reconfigurados dinamicamente.
(3) Permita que vários dispositivos funcionem ao mesmo tempo.
(4) Pode fornecer energia para dispositivos no barramento USB.
(5) O protocolo de comunicação suporta um modo misto de transmissão de dados isócrona e transmissão de mensagem assíncrona.
(6) Suporta transmissão de dados de voz, áudio e vídeo em tempo real.
Aplicações:
(1) Periféricos de computador
(2) Conectividade de dispositivos móveis
(3) Dispositivos de armazenamento
(4) Câmeras digitais e filmadoras
(5) Equipamentos de vídeo e áudio
(6) Controladores de jogos
(7) Sistemas integrados
(12) Que tipos de informações de dados existem? Que tipos de informações são enviadas entre a CPU e os dispositivos de E/S? Qual é a porta correspondente?
(1) Quantidade digital, quantidade analógica e quantidade de comutação.
(2) Informações de dados, informações de status e informações de controle.
(3) Porta de dados, porta de status e porta de controle.
(13) Que tipos de informações de dados existem? Que tipos de informações são enviadas entre a CPU e os dispositivos de E/S? Qual é a porta correspondente?
(1) Existem três tipos de informações digitais: quantidade digital, quantidade analógica e quantidade de comutação.
(2) Informações de dados, informações de status e informações de controle.
(3) Porta de dados, porta de status e porta de controle.
(14) O que é uma interface IO? Quais são as funções e funções básicas da interface IO?
(1) IO é um componente lógico padronizado conectado entre a CPU, memória principal e dispositivos periféricos através do barramento do sistema.
(2) A interface IO atua como um "conector" entre dois componentes para realizar a transmissão de informações entre si.
(15) Quais são os dois métodos geralmente usados pelo computador para endereçar a porta IO? Qual método é usado no sistema de microcomputador 8086?
(1) As portas de E/S e a memória são endereçadas uniformemente; as portas de E/S são endereçadas individualmente.
(2) O sistema 8086 usa um método de endereçamento separado para portas de E/S.
(16) Qual é o intervalo de endereço da porta IO de 8086CPU? Qual é o intervalo de endereço da porta IO no IMB PC? Quais intervalos de endereços estão disponíveis para os usuários?
(1)0-0xfffff。
(2)0-0xffffff。
(3)0-0xffff。
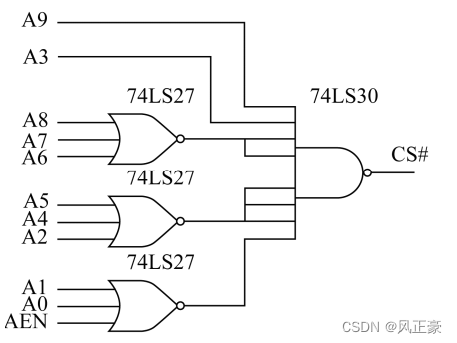
(17) Defina o endereço da porta IO de uma interface periférica para 208H e projete um decodificador de porta para esta interface.
(1) Explicação em vídeo recomendada: https://www.bilibili.com/video/BV1yP411N7A6/?spm_id_from=333.337.search-card.all.click&vd_source=a6289e7ab435b598d918e64d45cd15c0 (
2) É muito simples memorizar rotinas para esse tipo de tópico
<1> Antes de mais nada, precisamos saber o que representa o endereço da porta IO da interface periférica. Tome 208H aqui como exemplo, 208H=10 0000 1000B, então isso significa que se A9 e A3 estão em alto nível, outros pinos e o pino AEN estão em nível baixo Em seguida, selecione o IO atual por um longo tempo. (Quando AEN está baixo, significa acesso de I/O controlado pela CPU, então para selecionar IO, AEN deve ser baixo)
<2> Agora sabemos qual deve ser a tensão dessas 11 linhas, e é necessário que este IO deve ser selecionado neste nível. Então podemos usar portas NAND e portas NOR . A porta NAND estipula que 0 é 1 e a porta NOR é 1 e 0.Usando esse recurso, quando a linha de endereço precisar ser 0, coloque uma porta NOR e, se a linha de endereço for 1, conecte diretamente a porta NAND.
<3>Tomando este tópico como exemplo, como A9 e A3 são de alto nível, eles estão conectados diretamente ao portão NAND. Enquanto as outras linhas de endereço são todas de baixo nível, uma porta NOR é intercalada entre a linha de endereço e a porta NAND.
(18) Defina o endereço da porta IO de uma interface periférica como 300H~307H, ou seja, o periférico requer 8 endereços de porta IO consecutivos e projete um decodificador de endereço de porta para esta interface.
(1) Este tipo de pergunta é uma versão atualizada da pergunta anterior e um chip 74LS138 precisa ser adicionado.
(2)
<1> Primeiro, precisamos saber quais linhas de endereço 300H~307H não foram alteradas. Obviamente, apenas as três linhas de endereço A0 ~ A3 foram alteradas e as outras não foram alteradas.
<2> Portanto, primeiro conectamos AEN a E2. A0 ~ A3 estão diretamente conectados aos três pinos do ABC.
<3> Os outros fios são os mesmos da pergunta anterior. O nível alto é conectado diretamente ao portão NAND, e o nível baixo é conectado primeiro ao portão NOR e depois conectado ao portão NAND.

(19) Quais são os métodos de transmissão de dados entre a CPU e os periféricos? Quais são as características de cada método de transmissão e para quais aplicações eles são adequados?
(1) Método de transferência de dados entre CPU e periféricos:
<1> Transferência incondicional
<2> Transferência de consulta
<3> Controle de interrupção
<4> Método de controle DMA
(2)
<1> Método de transferência incondicional é o mais simples O programa controla o método de entrega . O método de entrada/saída de controle de programa refere-se a um método no qual as instruções de E/S são usadas para realizar entradas/saídas na programação do programa.
<2> Ao consultar o modo de transmissão, a CPU lê ativamente o registro de status por meio do programa para entender a situação da interface e conclui a operação de dados correspondente. As operações de consulta precisam ser repetidas em intervalos de menos ciclos de clock e, portanto, são ineficientes para a CPU.
<3> No modo de transmissão de interrupção, quando o programa estiver rodando normalmente, se ocorrer um evento externo com maior prioridade, a UCP será notificada através da solicitação de interrupção, e a UCP lerá o registrador de status para determinar o tipo de evento, de modo a executar diferentes processamentos de filiais. Este método tem alta eficiência de CPU e bom desempenho em tempo real.
<4> Método de transmissão DMA (Direct Memory Access), ou seja, método de acesso direto à memória. O processo específico de transferência de dados é concluído diretamente pelo hardware (controlador DMA) entre a memória e o IO, e a CPU apenas transfere temporariamente o direito de controle para o DMA no início até o final da transferência de dados. Este método é mais rápido do que passar pela CPU, especialmente ao transferir em lotes.
(20) O que é comunicação paralela? Quais são as características da comunicação paralela?
(1) Comunicação paralela de dados refere-se ao método de transmissão de dados em unidades de bytes ou palavras.
(2)
<1> O número de bits de dados transmitidos a cada vez é grande e a velocidade é rápida;
<2> A sobrecarga da linha de transmissão do sinal é grande (o número de linhas de dados corresponde ao número de bits de dados transmitidos), e o custo é alto;
<3> Frequentemente usado em distâncias curtas, ocasiões de transmissão de dados em alta velocidade.
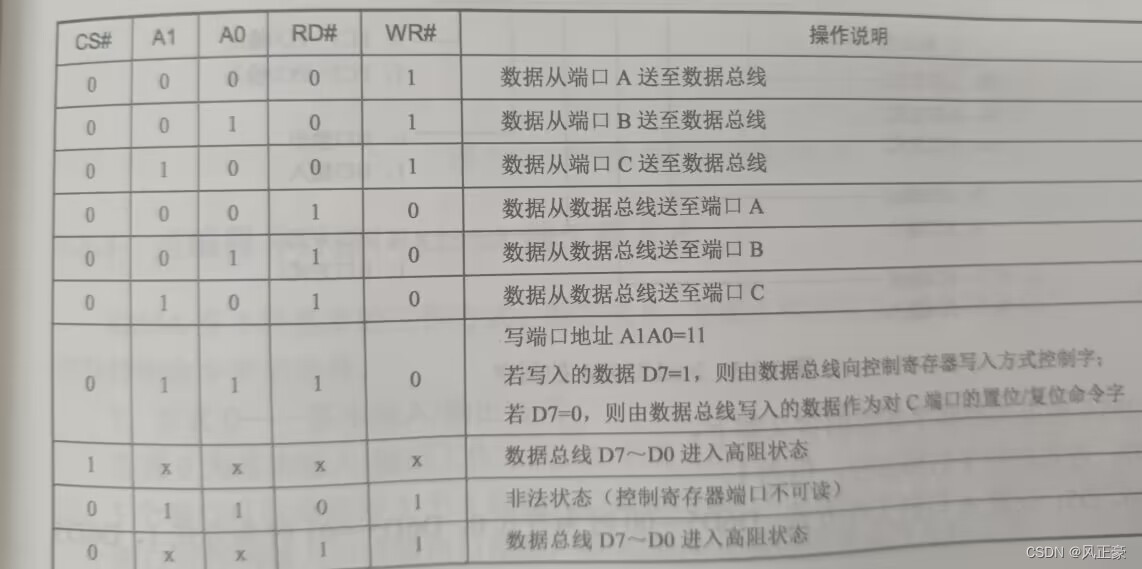
(21) Quando os dados são lidos na CPU da porta C do 8255A para o barramento de dados, quais são os níveis dos pinos 8255A CS#, A1, A0, RD# e WR#?
CS # deve ser de baixo nível para selecionar o chip.
Somente quando A1 e A0 são 10 a porta C pode ser selecionada.
RD# deve ser de nível baixo (pulso negativo).
Lê dados na CPU, WR# é de alto nível.
(22) Defina os 4 endereços de porta de 8255A para 60H~63H e tente escrever o programa de inicialização nas seguintes situações.
(1) Defina o grupo A e o grupo B como modo 0, a porta A e a porta B são de entrada e a porta C é de saída.
<1> Esse tipo de tópico é relativamente simples, basta seguir a rotina.
<2> Em primeiro lugar, o título geralmente dá 4 endereços de porta, então só precisamos olhar para o endereço de porta com o maior valor. Porque a ordem padrão dos 4 endereços de porta de 8255A é A, B, C e porta de controle. Como somos o programa de inicialização aqui, precisamos apenas prestar atenção à porta de controle.
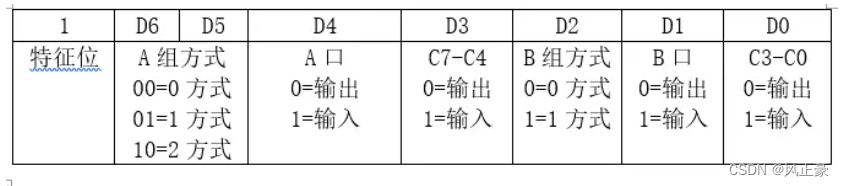
<3> Sobre a introdução do registro da porta de controle, precisamos apenas saber a figura a seguir. (De um modo geral, o título será dado. Não deve haver 250 para você lembrar)
<4> Depois de conhecer o processo da segunda e terceira etapas. Agora podemos começar a analisar como resolver esse problema. Em primeiro lugar, sabemos que a porta com o maior número é 63H, então lembre-se desse número. Em segundo lugar, de acordo com os requisitos do tópico, a porta A é o modo 0, entrada, então D6 e D5 são 00 e D4 é 0. A porta B é o modo 0, entrada, então D2 é 0 e D1 é 0. A porta C é saída, então D3 e D0 são 0. O padrão D7 é 1.
MOV DX,0063H ;H表示16进制
MOV AL,10010010B ;B表示2进制
OUT DX,AL ;将数据写入地址63H
(2) Defina o grupo A como modo 2, o grupo B como modo 1 e a porta B como saída.
<1> Ainda de acordo com a figura acima, porque A deve ser o modo 2, então D6 é 1 e D5 é 0.
<2> Como o grupo B é o modo 1, D2 é 1. O Grupo B é a saída, então D1 é 0.
<3> Exceto que D7 é 1 por padrão, outros bits podem ser escritos livremente. Por conveniência, defino os outros bits como 0.
MOV DX,0063H ;H表示16进制
MOV AL,11000100B ;B表示2进制
OUT DX,AL ;将数据写入地址63H
(3) Defina a porta A e a porta B para o modo 1, ambas são entradas e PC6 e PC1 são saídas.
<1>Como a porta A é o modo 1, entrada. Então D6 é 0, D5 é 1 e D4 é 1.
<2>Como a porta B é o modo 1, entrada. Então D2 é 1 e D1 é 1.
<3> Como PC6 e PC1 são emitidos, D3 é 0 e D0 é 0.
MOV DX,0063H ;H表示16进制
MOV AL,10110110B ;B表示2进制
OUT DX,AL ;将数据写入地址63H
(4) A porta A funciona no modo 1, entrada; a porta B funciona no modo 0, saída; os 4 bits altos da porta C cooperam com a porta A e os 4 bits baixos são de entrada.
<1>Como a porta A é o modo 1, entrada. Então D6 é 0, D5 é 1 e D4 é 1.
<2>Como a porta B é o modo 0, saída. Então D2 é 0 e D1 é 0.
<3>Como os 4 bits superiores da porta C funcionam com a porta A e a porta A é uma entrada, os 4 bits superiores da porta C PC4-PC7 devem ser emitidos e D3 é 0.
<4>Como os 4 bits inferiores da porta C são inseridos, D0 é 1.
MOV DX,0063H ;H表示16进制
MOV AL,10110001B ;B表示2进制
OUT DX,AL ;将数据写入地址63H
(23) Quantos canais tem o temporizador/contador programável 8253? Quantos modos de trabalho existem para cada canal? Quais são as principais características das várias formas de trabalhar?
(1) 0, 1, 2 três canais.
(2) Cada canal tem 6 modos de trabalho.
(3)
<1> Modo 0: Interrupção gerada quando a contagem termina
<2> Modo 1: Pulso único programável
<3> Modo 2: Gerador de frequência
<4> Modo 3: Gerador de onda quadrada
<5> Modo 4: Gatilho de software estroboscópio
<6> Modo 5: estroboscópio de gatilho de hardware
(24) Supondo que a frequência do relógio de entrada do contador 8253 seja 2MHZ, para gerar um sinal de saída de onda quadrada de 20KHZ, qual é o valor inicial de contagem que deve ser carregado no contador?
Como o valor inicial de entrada é 100
2 MHZ 20 KHZ = 100 \frac{2MHZ}{20KHZ}=10020 KHz _2 M H Z=100
(25) Defina o endereço da porta IO de 8253 para 300H~303H e tente programar os três contadores de 8253, de modo que o contador 0 funcione no modo 1 e o valor de contagem inicial seja 8253H; o contador 1 funcione no modo 2 e o valor inicial da contagem é 7788H; o contador 2 funciona no modo 3 e o valor inicial da contagem é 1000.
(1) Em primeiro lugar, precisamos saber que existem 4 portas IO de 8253, e o padrão é canal 0, canal 1, canal 2 e porta de controle de pequeno a grande.
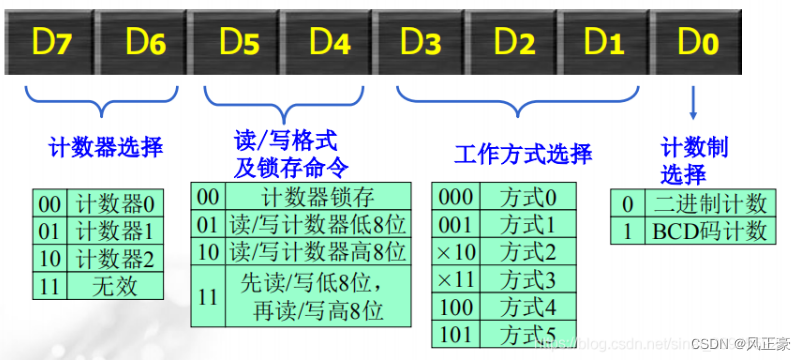
(2) A palavra de controle de 8253 é a seguinte. A fim de prevenir algumas pessoas que não sabem muito sobre isso, deixe-me explicar alguns dos significados dessas palavras de controle.
<1>8253 tem 3 contadores, que podem ser selecionados de acordo com a situação.
<2> O contador possui 4 estados, se estiver travado, não contará. Se for 01, apenas os 8 bits mais baixos são contados. Se for 10, então está contando com oito dígitos. Se for 11, então são 16 bits para contagem. (Nota: Este é um pouco como o chip de TI. O temporizador é dividido em temporizador A e temporizador B. O temporizador A e o temporizador B representam respectivamente os 8 bits altos e baixos de um temporizador de 16 bits, mas para obter uma contagem maior Geralmente, o timer A e o timer B são combinados em um, o que é equivalente a escrever 1 em D5 e D4 aqui)
<3>8253 tem 6 modos de trabalho, como na pergunta acima.
<4> Qual é a diferença entre a última contagem binária e a contagem do código BCD? Muito simples, se escrevermos 1234 no registrador, se D0 for 0, então 1234 é um número hexadecimal, que é 4660 em decimal. Se for contagem de código BCD, ou seja, D0 é 1, então 1234 no registrador é decimal.
(4) Com a pré-base, podemos começar a escrever programas agora.
<1>Porque precisamos controlar o contador 0. Então D6 e D7 são 0.
<2>Como o 8253H não pode armazenar dados de 8 bits, D5 e D4 são 1.
<3> Como o modo 1 é necessário, D3-D1 é 001.
<4>8253H é um número hexadecimal, então escrevemos 0 em D0 aqui.
<5> Após escrever a palavra de controle, é necessário transferir o valor inicial de contagem 8253H para o contador 0. Observe que aqui você precisa escrever os 8 bits inferiores primeiro e, em seguida, gravar os 8 bits superiores.
MOV DX,303H
MOV AL,00110010B
OUT DX,AL ;设置计数器0工作于方式1,二进制计数
MOV DX,300H ;因为计数器0为最小地址
MOV AX,8253H
OUT DX,AL ;先写入低八位,控制字中规定的
OUT DX,AH
(5) De acordo com a rotina acima, é obviamente muito simples.
<1> O contador 1 funciona no modo 2, então a palavra de controle deve ser 0111 0100B ou 0111 1100B. Porque o modo 2 da palavra de controle estipula que D3 pode ser qualquer valor.
<2> O método de escrita do valor inicial 7788H é como acima
MOV DX,303H
MOV AL,01110100B
OUT DX,AL ;设置计数器1工作于方式2,二进制计数
MOV DX,301H ;计数器1的地址
MOV AX,8253H
OUT DX,AL ;先写入低八位,控制字中规定的
OUT DX,AH
(6) Ainda siga a rotina acima.
<1> O contador 2 funciona no modo 3, então a palavra de controle deve ser 1011 0111B ou 1011 1111B. Porque o modo 2 da palavra de controle estipula que D3 pode ser qualquer valor. Deve-se notar aqui que os dados escritos estão em decimal, então D0 é 1.
<2> O valor inicial 1000 é escrito como acima
MOV DX,303H
MOV AL,10110111B
OUT DX,AL ;设置计数器2工作于方式3,BCD计数
MOV DX,302H ;计数器2的地址
MOV AX,1000
OUT DX,AL ;先写入低八位,控制字中规定的
OUT DX,AH
(26) Quais são os dois tipos de interrupções da CPU 8086? O que são interrupções de hardware e interrupções de software? Qual é a diferença entre os dois processos no PC?
(1) Interrupção de hardware, interrupção de software.
(2)
<1>A interrupção de hardware é para solicitar que o processador execute o serviço de interrupção inserindo sinais elétricos através da linha de solicitação de interrupção.
<2>A interrupção de software é um processo de interrupção que é reconhecido e processado dentro do processador.
(3)
<1>A interrupção de hardware geralmente é fornecida pelo controlador de interrupção para fornecer o código do tipo de interrupção, e o processador se volta automaticamente para o manipulador de interrupção
; nenhuma informação externa é necessária.
(27) O que é uma interrupção não mascarável? O que é uma interrupção mascarável? Quais são as condições para que eles obtenham uma resposta da CPU?
(1) Interrupção não mascarável: A solicitação de interrupção introduzida pelo pino NMI que não é afetada pelo bit sinalizador de habilitação de interrupção IF é uma interrupção não mascarável.
(2) Interrupção mascarável: A solicitação de interrupção introduzida pelo pino INTR e afetada pelo bit sinalizador de habilitação de interrupção IF é uma interrupção mascarável.
(3) Contanto que a largura efetiva do pulso de solicitação no NMI seja maior que dois ciclos de clock, a CPU pode travar o sinal de solicitação. Quando a CPU amostrar um sinal de transição de baixo para alto no NMI, ele entrará automaticamente a rotina de serviço de interrupção NMI. Para interrupções mascaráveis, a CPU decidirá se deve responder de acordo com o status do bit sinalizador de habilitação de interrupção IF. Se IF=0, a UCP ignora o pedido de interrupção e continua a executar a próxima instrução; se IF=1, a UCP passará para o ciclo de resposta à interrupção após executar a instrução atual.
(28) Qual é o número do tipo de interrupção? O que é um vetor de interrupção? O que é a tabela de vetores de interrupção? No sistema de microcomputador baseado em 8086CPU, qual é a relação entre o número do tipo de interrupção e o vetor de interrupção?
(1) Número do tipo de interrupção: o código atribuído pelo sistema a cada fonte de interrupção
(2) Vetor de interrupção: uma área de memória padrão que armazena os endereços de entrada de todos os tipos de manipuladores de interrupção.
(3) Tabela de vetores de interrupção: armazene todas as interrupções do sistema e seus vetores de interrupção correspondentes em uma área de acordo com certas regras.
(4) No 8086CPU, a relação entre o número do tipo de interrupção e o vetor de interrupção: multiplique o número do tipo de interrupção por 4 para obter a entrada da tabela de vetores.
(29) O que é uma fonte de interrupção? O que é prioridade de interrupção? O que é aninhamento de interrupção?
(1) Fonte de interrupção: O evento que causou a interrupção
(2) Prioridade de interrupção: A interrupção é dividida em vários níveis de acordo com a prioridade chamada prioridade de interrupção
(3) Aninhamento de interrupção: A fonte de interrupção com alta prioridade de interrupção pode interromper o baixa prioridade que está sendo executada Uma rotina de serviço de interrupção de nível é chamada de aninhamento de interrupção.
(30) Quantos níveis de interrupções o 8086CPU tem no total? Quais são seus números de tipo de interrupção? Onde está localizada a tabela de vetores de interrupção na área de memória?
(1) Interrupção de 256 níveis
(2) O número do tipo de interrupção é 0~255
(3) A tabela de vetores de interrupção é armazenada começando na memória 0 e armazenada em 1024 unidades de 0000:0000 a 0000:03FF.
Quais são os 4 modos de trabalho do controlador DMA 8237A? Quais são as características e ocasiões de aplicação de vários métodos de trabalho?
<1>Modo de transmissão de byte único: 8237A libera o barramento do sistema após a conclusão de cada transmissão de byte.
<2>Modo de transferência de bloco: vários bytes podem ser transferidos continuamente, somente quando o contador de bytes é reduzido a zero, o barramento é liberado e a transferência termina.
<3> Modo de transmissão de solicitação: somente após a transmissão de cada byte, se for detectado que o terminal DREQ se torna um nível inativo, a transmissão será interrompida e, quando o DREQ se tornar um nível ativo novamente, a transmissão continuará na base original .
<4> Modo de transmissão em cascata: Vários 8237A podem ser colocados em cascata para formar um sistema DMA mestre-escravo, e um máximo de 5 8237A podem formar um sistema DMA secundário para obter 16 canais DMA. O registro de modo é definido para o modo de transferência em cascata, e o chip escravo não precisa definir o modo cascata.
(31) Que tipos de métodos de transmissão de dados existem na comunicação serial e quais são suas características?
(1) Simplex, half-duplex e full-duplex.
(2) Transmissão Simplex: Existe apenas uma linha de transmissão de comunicação e os dados só podem ser transmitidos em uma direção fixa. Ou seja, uma parte só pode ser o remetente dos dados e a outra parte só pode ser o receptor dos dados.
(3) Transmissão half-duplex: Existe apenas uma linha de transmissão de comunicação e ambas as partes na comunicação têm a capacidade de receber e enviar dados. Mas este método só pode usar a multiplexação por divisão de tempo para transmitir dados, ou seja, os dados só podem ser transmitidos em uma direção ao mesmo tempo. Para realizar a transmissão bidirecional de dados, o envio e o recebimento só podem ser realizados alternadamente .
(4) Transmissão full-duplex: Existem duas linhas de transmissão de comunicação, ambas as partes de comunicação podem enviar e receber dados ao mesmo tempo, ambas as partes de comunicação possuem transmissores e receptores independentes e cada uma possui uma linha de transmissão para conectá-los, superando assim o simplex e meio O método duplex traz a desvantagem de que ambas as partes não podem enviar e receber dados ao mesmo tempo.
(32) Qual é a diferença entre comunicação full-duplex e half-duplex? A comunicação full-duplex pode ser executada em um circuito de dois fios?
(1) A transmissão de dados half-duplex permite que os dados sejam transmitidos em duas direções, mas, em um determinado momento, permite apenas que os dados sejam transmitidos em uma direção, na verdade é uma comunicação simplex que muda de direção. Considerando que, a comunicação de dados full-duplex permite que os dados sejam transmitidos em ambas as direções simultaneamente.
(2) Não, a comunicação full-duplex não pode ser executada em um circuito de dois fios, e somente a transmissão ou recepção de terminação única é possível. Porque uma linha de sinal e uma linha de terra só podem transmitir em uma direção ao mesmo tempo.