Tutorial SPI RT-Thread
O ambiente experimental utiliza a placa de desenvolvimento Pandora da pontual atom.
O dispositivo escravo SPI usa o sensor de temperatura, umidade e pressão atmosférica BMP280.
Use o RT-Thread Studio para criar funções básicas.
1. Crie um projeto
Use o RT-Thread Studio IDE para criar projetos de nível de chip. Após a conclusão da criação, você pode compilar e baixar diretamente para teste.
2. Adicionar motorista
2.1 Configuração do projeto
Após a criação do projeto, 组建和服务层/Drivers/SPIabra o driver SPI no RT-Thread Studio.

Em seguida, configure o SPI:
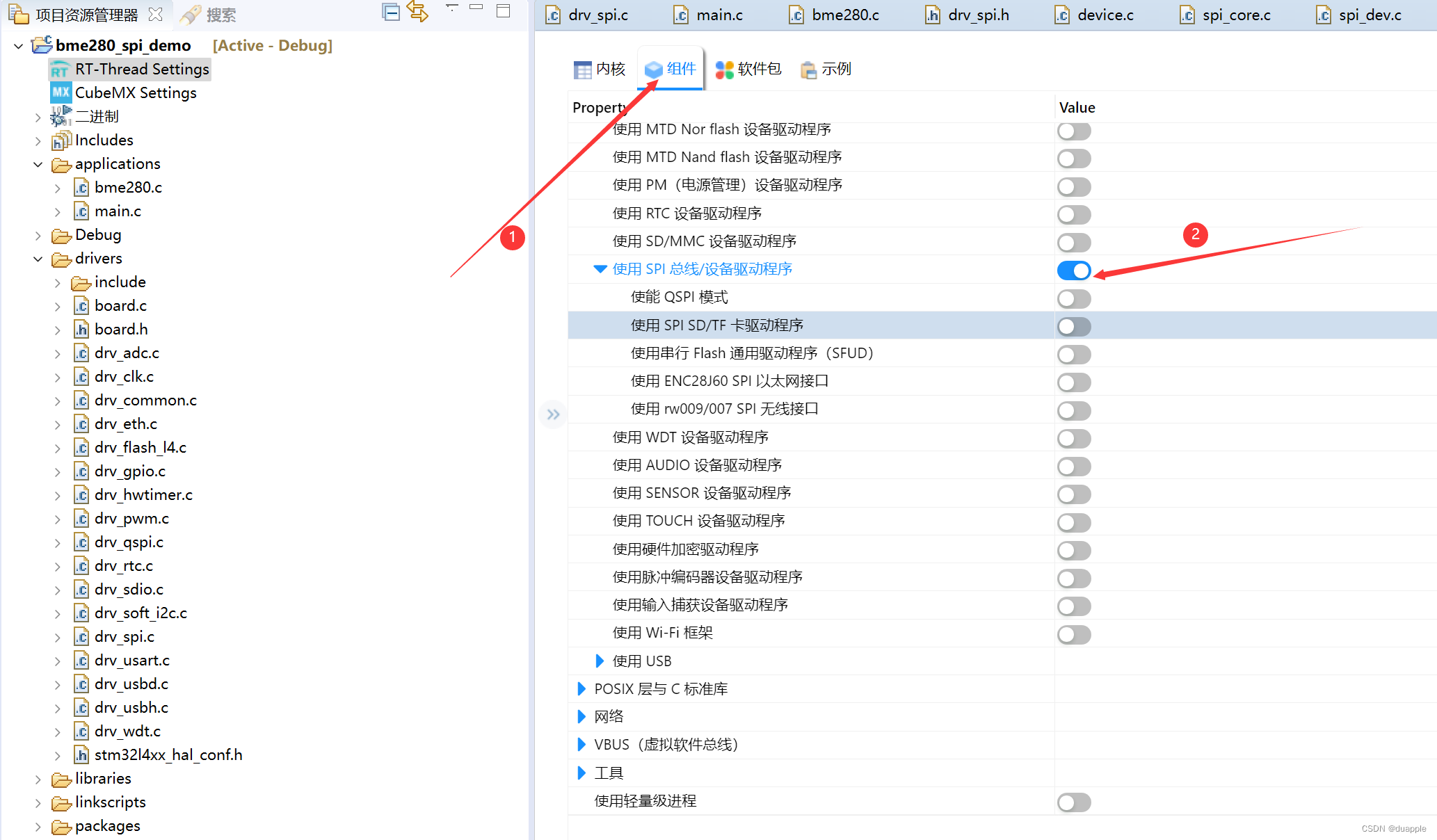
Após a conclusão da configuração, Ctrl+Ssalvar a configuração atualizará automaticamente o código do projeto.
Depois de concluir a configuração, você também precisa board.habrir a macro do SPI que precisa ser usado no .
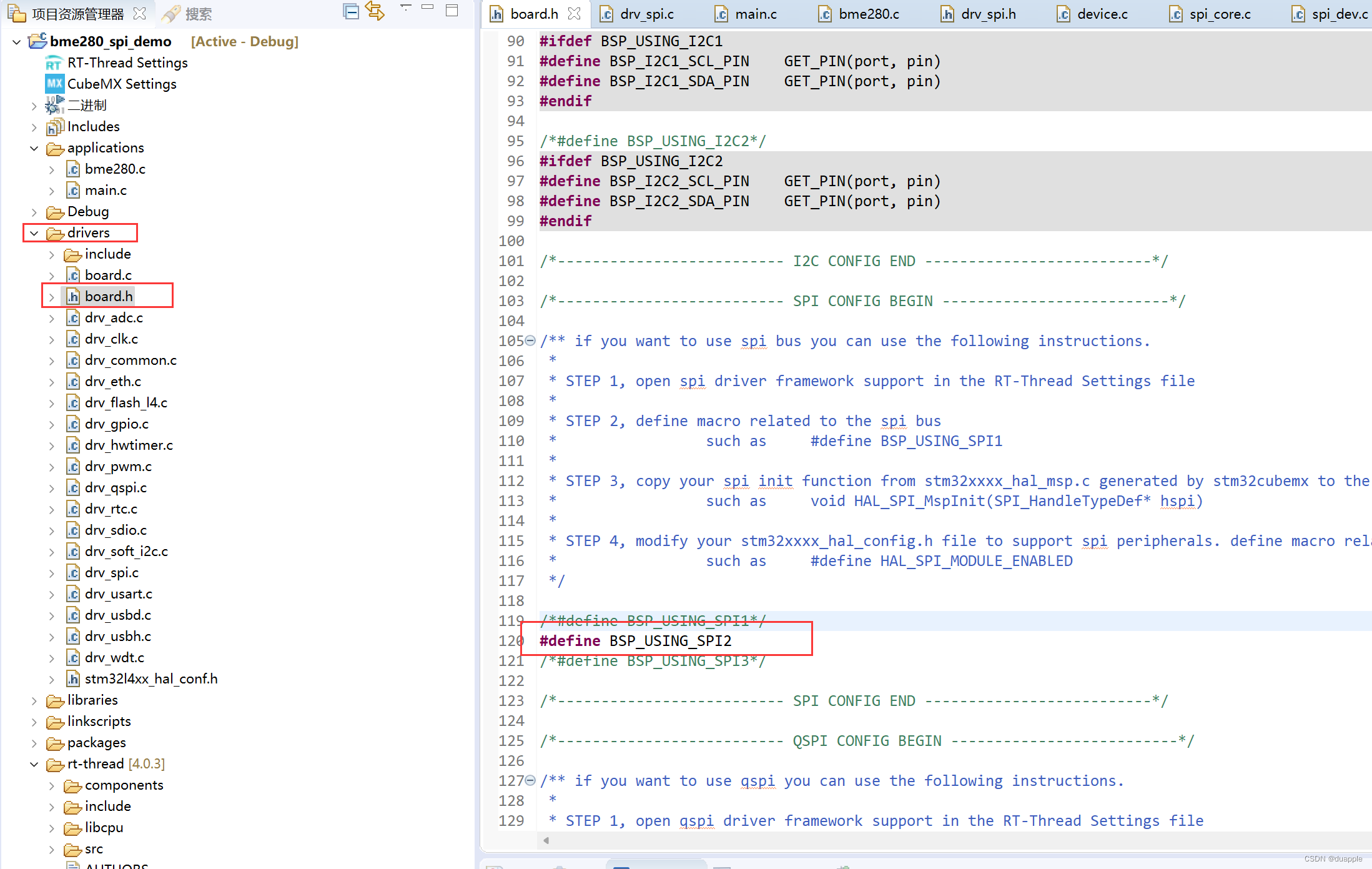
Em seguida, board.cadicione o código de inicialização STM32 SPI, você pode gerar o código configurando o CubeMX:
SPI_HandleTypeDef hspi2;
/* SPI2 init function */
void MX_SPI2_Init(void)
{
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
if(spiHandle->Instance==SPI2)
{
/* USER CODE BEGIN SPI2_MspInit 0 */
/* USER CODE END SPI2_MspInit 0 */
/* SPI2 clock enable */
__HAL_RCC_SPI2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**SPI2 GPIO Configuration
PB13 ------> SPI2_SCK
PB14 ------> SPI2_MISO
PB15 ------> SPI2_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN SPI2_MspInit 1 */
/* USER CODE END SPI2_MspInit 1 */
}
}
void HAL_SPI_MspDeInit(SPI_HandleTypeDef* spiHandle)
{
if(spiHandle->Instance==SPI2)
{
/* USER CODE BEGIN SPI2_MspDeInit 0 */
/* USER CODE END SPI2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_SPI2_CLK_DISABLE();
/**SPI2 GPIO Configuration
PB13 ------> SPI2_SCK
PB14 ------> SPI2_MISO
PB15 ------> SPI2_MOSI
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15);
/* USER CODE BEGIN SPI2_MspDeInit 1 */
/* USER CODE END SPI2_MspDeInit 1 */
}
}
Após a conclusão, o driver SPI é adicionado.
2.2 Análise de Código
2.2.1 Processo de uso do driver SPI
- O dispositivo de barramento SPI
rt_spi_bus_register()é registrado na estrutura do driver de dispositivo SPI por meio da interface. - A estrutura do driver de dispositivo SPI
rt_device_register()registra o dispositivo de barramento SPI no gerenciador de dispositivos de E/S por meio da interface. - O driver escravo SPI
rt_spi_bus_attach_device()monta o dispositivo escravo no dispositivo de barramento SPI por meio da interface e o registra na estrutura do driver de dispositivo SPI. - O driver escravo SPI acessa o hardware do dispositivo escravo SPI por meio da interface do dispositivo SPI.
2.2.2 Código
No grupo de motoristas drv_spi.c:
int rt_hw_spi_init(void)
{
stm32_get_dma_info();
return rt_hw_spi_bus_init();
}
INIT_BOARD_EXPORT(rt_hw_spi_init);
Com a declaração here INIT_BOARD_EXPORT(), adicione o código de inicialização à .rti_fn.1seção:
#define INIT_EXPORT(fn, level) \
RT_USED const init_fn_t __rt_init_##fn SECTION(".rti_fn." level) = fn
#define INIT_BOARD_EXPORT(fn) INIT_EXPORT(fn, "1")
Em seguida, concentre-se em inicializar o driver do dispositivo board.cem rt_hw_board_init()-> em.rt_components_board_init()
void rt_components_board_init(void)
{
volatile const init_fn_t *fn_ptr;
for (fn_ptr = &__rt_init_rti_board_start; fn_ptr < &__rt_init_rti_board_end; fn_ptr++)
{
(*fn_ptr)();
}
#endif
}
rt_hw_spi_bus_init()Chamado novamente rt_spi_bus_register(), rt_spi_bus_register()ligue rt_spi_bus_device_init()para ligar para rt_device_register()concluir o registro.
static rt_err_t spi_configure(struct rt_spi_device *device,
struct rt_spi_configuration *configuration)
{
RT_ASSERT(device != RT_NULL);
RT_ASSERT(configuration != RT_NULL);
struct stm32_spi *spi_drv = rt_container_of(device->bus, struct stm32_spi, spi_bus);
spi_drv->cfg = configuration;
return stm32_spi_init(spi_drv, configuration);
}
static const struct rt_spi_ops stm_spi_ops =
{
.configure = spi_configure,
.xfer = spixfer,
};
HAL_SPI_Init()A inicialização stm32_spi_init()é feita e registrada em ops. Após anexar, chame diretamente rt_spi_configure()para concluir a inicialização.
Observe que, ao contrário do uso de i2c, o SPI deve ser vinculado por meio de conexão para usar a interface do dispositivo SPI.
3. Usando SPI
Complete o código bmp280 para ler o Device ID, adicione-o ao arquivo bmp280.ce, em seguida, adicione o arquivo ao projeto:
#include <rtthread.h>
#include <rtdevice.h>
#include <drv_spi.h>
#define BME280_SPI_DEVICE_NAME "spi20"
#define BEM280_REG_ID 0XD0
rt_bool_t initialnized = RT_FALSE;
static void spi_bme280_demo(void)
{
uint8_t data = BEM280_REG_ID | (1 << 7);
rt_err_t err;
struct rt_spi_device * spi_bme280;
if (!initialnized) {
initialnized = RT_TRUE;
err = rt_hw_spi_device_attach("spi2", BME280_SPI_DEVICE_NAME, GPIOB, GPIO_PIN_12);
if (err) {
rt_kprintf("attach device error\r\n");
return ;
}
}
spi_bme280 = (struct rt_spi_device *)rt_device_find(BME280_SPI_DEVICE_NAME);
if (spi_bme280 == RT_NULL) {
rt_kprintf("find %s error\r\n", BME280_SPI_DEVICE_NAME);
return ;
}
struct rt_spi_configuration cfg = {
.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB,
.data_width = 8,
.max_hz = 1 * 1000 * 1000
};
err = rt_spi_configure(spi_bme280, &cfg);
if (err != RT_NULL) {
rt_kprintf("spi configurate error\r\n");
return ;
}
uint8_t send_buf[5] = {
data, 0xff};
uint8_t recv_buf[5];
if (rt_spi_transfer(spi_bme280, send_buf, recv_buf, 2) == 0) {
rt_kprintf("spi transfer error\r\n");
}
rt_kprintf("bme280 id: 0x%02x\r\n", recv_buf[1]);
}
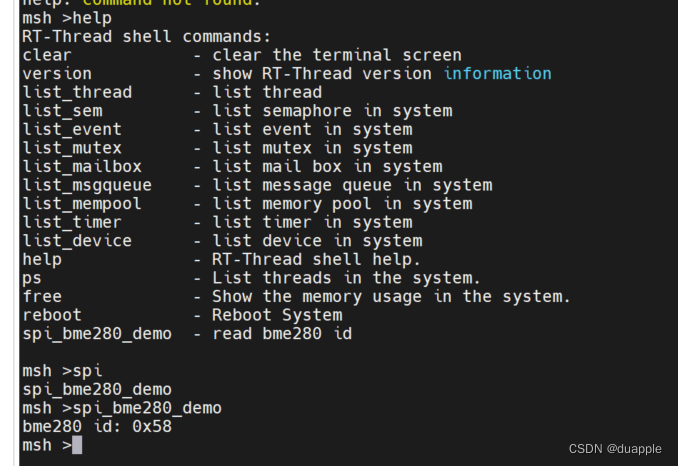
MSH_CMD_EXPORT(spi_bme280_demo, read bme280 id);
O CS Pin que uso aqui é o PB12, preste atenção aos parâmetros da interface anexada.
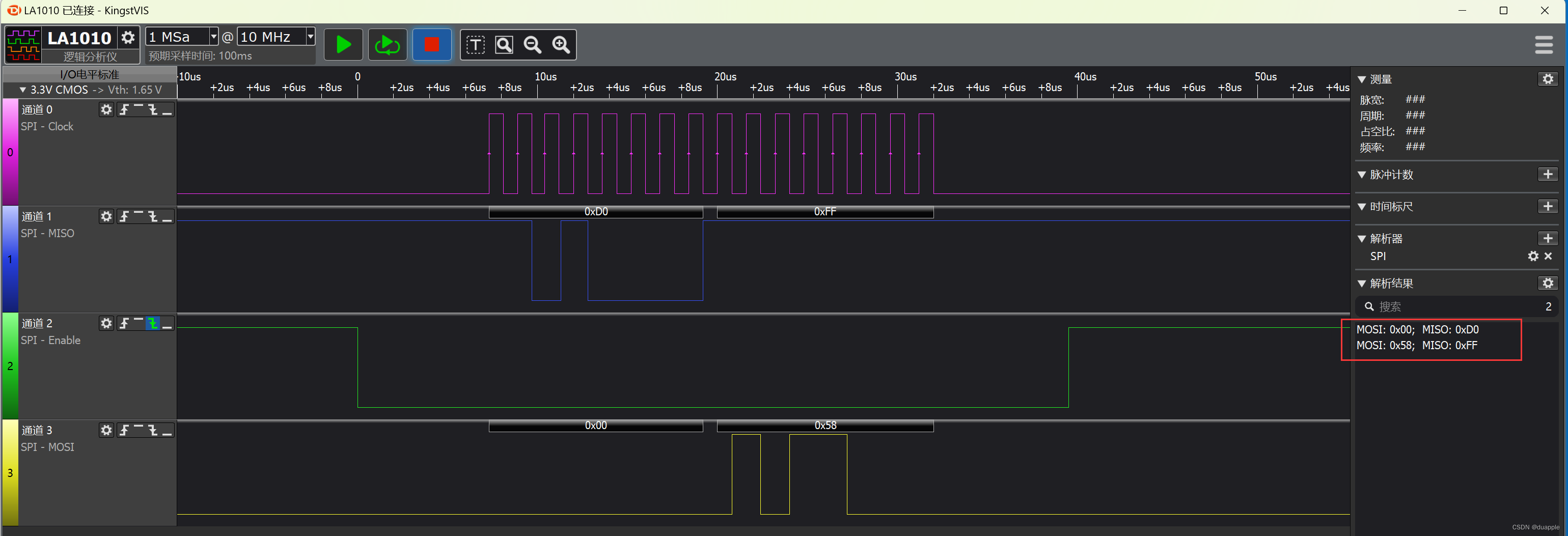
4. Teste
O ID do dispositivo de BMP280 é 0x58, BME280 é 0x60.
Compile e grave o projeto acima e digite o comando para verificar: