Este artigo inclui 1. Introdução ao Módulo do Motor 2. Simulação do Sistema de Acionamento do Motor CC 3. Simulação do Sistema de Acionamento do Motor CA
Essas simulações incluem aspectos como partida do motor, frenagem e regulação da velocidade.
Índice
2. Simulação do sistema de acionamento do motor DC
2.1 Simulação de inicialização do sistema de acionamento do motor DC
2.2 Simulação da regulação de velocidade do sistema de acionamento do motor DC
2.3 Simulação de frenagem do sistema de acionamento do motor DC
3. Simulação do sistema de acionamento do motor CA
3.1 Simulação de inicialização do sistema de acionamento do motor CA
3.2 Simulação da regulação de velocidade do sistema de acionamento do motor CA
3.2 Simulação de frenagem do sistema de acionamento do motor CA
1. Introdução ao Módulo Motor
1.1 Módulo do Motor DC

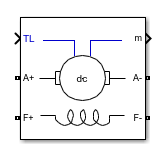
TL é a extremidade de entrada do torque de carga do motor. m emite uma série de sinais internos do motor. do seguinte modo:
| saída | símbolo | definição | unidade |
| 1 | Velocidade do motor | rad/s | |
| 2 | I a | corrente de armadura | A |
| 3 | Se | Corrente de excitação | A |
| 4 | O | Torque eletromagnético | N*m |
O módulo do motor DC é baseado no motor DC excitado separadamente, que pode ser composto de motores de excitação shunt e excitação em série através de conexão paralela e conexão em série de excitação e enrolamento. O módulo do motor DC pode funcionar como um módulo do motor ou como um gerador, que é totalmente determinado pela direção do torque do motor.

1) Modelo predefinido: Você pode usar o modelo interno do sistema, os parâmetros foram definidos, se não quiser usar, selecione não.
2) Entrada de quantidade mecânica: você pode escolher os parâmetros mecânicos do motor
3) Tipo de excitação: selecione o método de excitação do campo magnético do motor
4) Resistência de armadura e indutância
5) Resistência excitante e indutância
6) Excitação e indutância mútua da armadura
7) Momento de inércia
8) Coeficiente de atrito viscoso
9) Coeficiente de atrito seco
10) Velocidade angular inicial
11) Corrente inicial
1.2 Módulo do Motor CA

 1) Tipo de enrolamento: fio enrolado, gaiola, gaiola dupla
1) Tipo de enrolamento: fio enrolado, gaiola, gaiola dupla
2) Modelo predefinido
3) Entrada de quantidade mecânica
4) Seleção do sistema de coordenadas de referência: há sistema de coordenadas do estator, sistema de coordenadas do rotor e sistema de coordenadas de rotação síncrona.
5) Parâmetros nominais: potência, tensão, frequência
6) Resistência do estator, indutância do estator
7) Resistência do rotor, indutância do rotor
8) Indutância mútua
9) Momento de inércia (em SI) ou constante de tempo inercial (em pu), coeficiente de amortecimento, número de pares de pólos
10) Condições iniciais: escorregamento inicial, posição angular inicial do rotor, amplitude da corrente do estator, ângulo de fase.
2. Simulação do sistema de acionamento do motor DC
2.1 Simulação de inicialização do sistema de acionamento do motor DC
2.1.1 Simulação de partida direta de motor CC excitado separadamente
A tensão nominal é aplicada diretamente em ambas as extremidades da armadura do motor para iniciar. O problema com a partida direta é que a corrente de partida é grande.


2.1.2 Simulação da partida em estágios da resistência em série do circuito de armadura do motor DC excitado separadamente


2.1.3 Simulação da pressurização passo a passo do circuito de armadura do motor DC excitado separadamente


2.2 Simulação da regulação de velocidade do sistema de acionamento do motor DC
2.2.1 Simulação da regulação de velocidade da resistência em série do circuito de armadura do motor DC excitado separadamente

2.2.2 Simulação de regulação de velocidade de fluxo variável de motor CC excitado separadamente


2.2.3 Simulação de regulação de velocidade de tensão variável de armadura de motor DC excitada separadamente


2.3 Simulação de frenagem do sistema de acionamento do motor DC
A característica do estado de frenagem é que a direção do torque eletromagnético Te é oposta à da velocidade de rotação n.
2.3.1 Simulação da frenagem dinâmica do motor DC excitado separadamente


2.3.2 Simulação de frenagem de conexão reversa da fonte de alimentação da armadura do motor CC com excitação separada


2.3.3 Simulação de motor DC excitado separadamente com tração reversa e frenagem de conexão reversa


2.3.4 Simulação de frenagem regenerativa de motor DC excitado separadamente
(1) Simulação de frenagem de feedback direto


(2) Simulação de frenagem de feedback reverso


3. Simulação do sistema de acionamento do motor CA
3.1 Simulação de inicialização do sistema de acionamento do motor CA
3.1.1 Simulação de partida direta do motor CA


3.1.2 Simulação de partida da resistência ou reator do estator do motor CA




3.1.3 Simulação de partida abaixadora do transformador do motor CA


3.1.4 Simulação da inicialização da resistência em série do circuito do rotor do motor do enrolamento


3.2 Simulação da regulação de velocidade do sistema de acionamento do motor CA
3.2.1 Simulação de regulação de velocidade abaixadora de transformador de motor CA


3.2.2 Simulação de regulação de velocidade do resistor do transformador de motor CA


3.2.3 Simulação de controle de frequência do motor CA


3.2 Simulação de frenagem do sistema de acionamento do motor CA
3.2.1 Simulação da frenagem natural do motor CA


3.2.2 Simulação de frenagem dinâmica do motor CA


3.2.3 Funcionamento de avanço e reverso do motor CA e simulação de frenagem reversa


3.2.4 Simulação de frenagem com realimentação reversa do motor CA


Resumo: Este artigo simula motores DC e motores AC de acordo com "Tecnologia de Simulação Gráfica de Sistema de Controle Elétrico Baseado em MATLAB".