Resumo do artigo
A direção autônoma está se tornando a maior variável no transporte. Qualquer um pode causar engarrafamentos. Contanto que você pise no freio, o motorista atrás de você tem que pisar no freio, e então o motorista atrás dele tem que fazer o mesmo, para que o comportamento de frear e reiniciar possa ser transmitido por vários quilômetros.
Recentemente, eu estava lendo o livro "Transporte Inteligente" (uma grande mudança que afetará os seres humanos nos próximos 10 a 40 anos) escrito por Robin Li, o fundador do Baidu. Com a ajuda deste artigo, simplesmente organizei e resumi algumas das minhas notas pessoais.
1. Condução autônoma
1.1 Normas de Condução Autônoma
Atualmente, existem dois tipos de padrões de direção autônoma, um é um padrão internacional e o outro é um padrão autodefinido em meu país.
1) Classificação da direção autônoma definida pela Sociedade Internacional de Engenheiros de Máquinas Automáticas (SAE)
A classificação de direção automática definida pela Sociedade Internacional de Engenheiros de Máquinas Automáticas (SAE) é atualmente o padrão de referência mais comum na indústria. A classificação de direção automática de muitos países refere-se ao padrão de classificação de direção automática SAE J3016.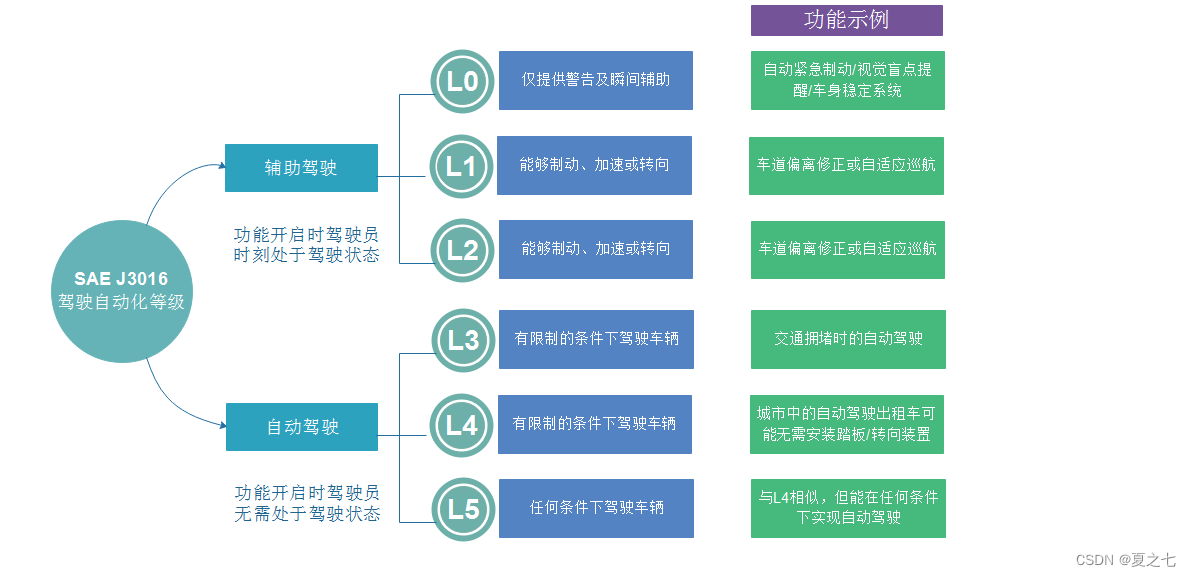
2) Classificação da direção autônoma na China
Em 20 de agosto de 2021, o padrão nacional recomendado GB/T40429-2021 "Classificação de Automação de Direção Automotiva" proposto pelo Ministério da Indústria e Tecnologia da Informação e sob a jurisdição do Comitê Técnico Nacional de Padronização Automotiva foi aprovado pela Administração Estatal de Regulamentação do Mercado e o Comitê Nacional de Gestão de Normalização. (Anúncio de Norma Nacional nº 11 de 2021), que entrará em vigor em 1º de março de 2022.
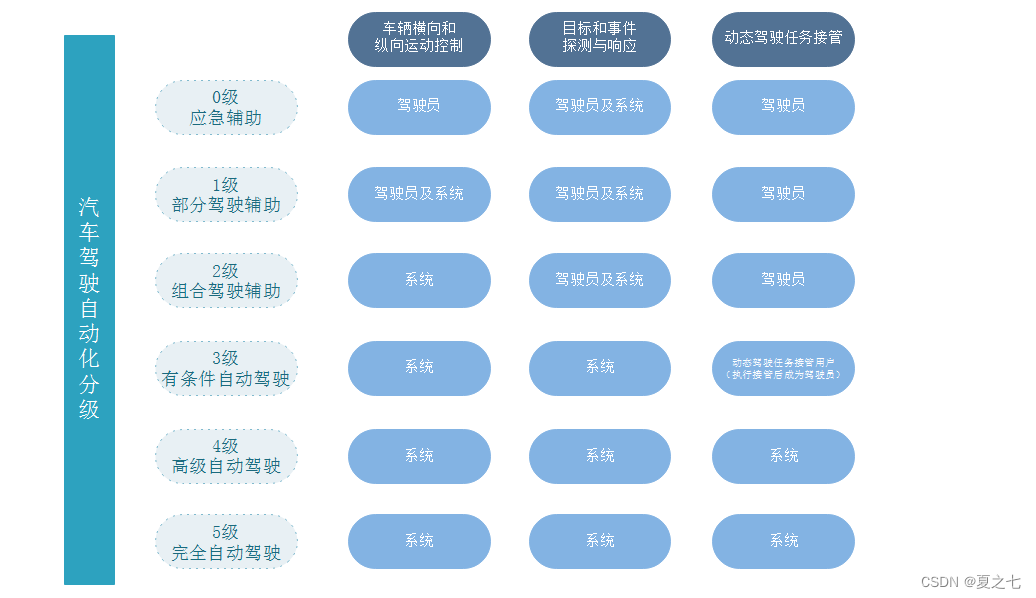
Automação de direção de nível 0 (assistência de emergência) : O sistema de automação de direção não pode executar continuamente o controle de movimento lateral ou longitudinal do veículo em tarefas de direção dinâmica, mas tem a capacidade de executar continuamente alguns alvos e detecção de eventos e resposta de tarefas de direção dinâmica.
Automação de direção nível 1 (assistência parcial à direção) : o sistema de automação de direção executa continuamente o controle de movimento lateral ou longitudinal do veículo em tarefas dinâmicas de direção dentro de suas condições operacionais de projeto e possui uma parte adaptada ao controle de movimento lateral ou longitudinal do veículo realizado pela trava Recursos de detecção e resposta de alvos e incidentes.
Automação de direção nível 2 (assistência combinada à direção) : O sistema de automação de direção realiza continuamente o controle do movimento lateral e longitudinal do veículo em tarefas dinâmicas de direção dentro de suas condições operacionais de projeto e possui uma parte adaptada ao controle de movimento lateral e longitudinal do veículo executado Alvo e capacidades de detecção e resposta a incidentes.
Automação de direção de nível 3 (condução autônoma condicional) : O sistema de automação de direção executa continuamente todas as tarefas dinâmicas de direção dentro de suas condições operacionais projetadas.
Automação de direção de nível 4 (condução altamente automatizada) : O sistema de automação de direção executa continuamente todas as tarefas dinâmicas de direção e realiza a aquisição dinâmica de tarefas de direção dentro de suas condições operacionais de projeto.
Automação de direção nível 5 (condução totalmente autônoma) : o sistema de automação de direção pode operar em qualquer condição de direção
1.2 Rota de Condução Autônoma
A direção autônoma que vemos hoje pode ser dividida em duas grandes rotas:
Uma é a abordagem de "baixa percepção + alta capacidade de processamento" representada pela Tesla;
a outra é a abordagem de "alta percepção + alta capacidade de processamento" representada pela direção autônoma do Google.
1. Rastreamento do Google
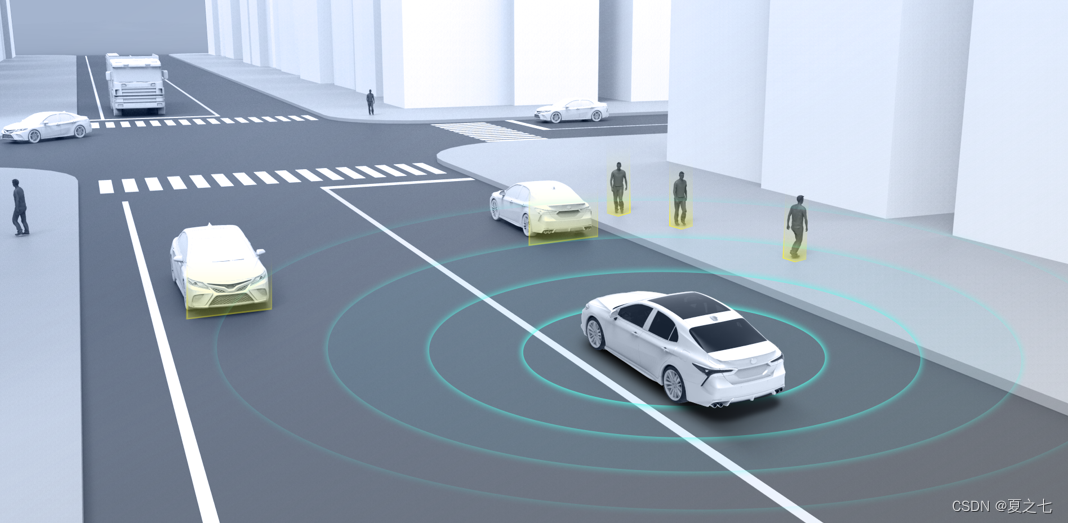
A capacidade de percepção dos carros autônomos é realizada por sensores.
Um carro autônomo no Google Track inclui sensores como câmeras, radar ultrassônico, radar de ondas milimétricas e lidar.
Os dados coletados por eles são fundidos por meio de algoritmos para julgar a distância dos obstáculos e capturar os detalhes visuais dos objetos.
Lidar é a chave para julgar se a direção autônoma é Google ou Tesla
Lidar : O princípio é "velocidade x tempo = distância".
Um feixe de luz é emitido, ele será refletido de volta após atingir um obstáculo, e então o sinal refletido será recebido. A diferença de tempo entre os tempos multiplicada pela metade da velocidade da luz é a distância do obstáculo.
Um feixe de luz não é muito útil, mas se 128 feixes de laser forem disparados de uma vez, 100 vezes por segundo, e ainda for uma varredura de rotação rápida de 360 graus, a utilidade se tornará maior. Os dados coletados podem restaurar os detalhes de todos os obstáculos em um espaço com raio de 150 metros e 20 metros do solo ao céu, com precisão de 2 centímetros.
Ao mesmo tempo, o lidar não será afetado pela luz e ainda pode fazer julgamentos precisos mesmo à noite sem iluminação.
Câmera : O LiDAR só pode julgar o contorno tridimensional de um objeto e não pode identificar a cor, textura, material e outros conteúdos de maneira muito delicada. Portanto, é necessário usar uma câmera para coletar informações físicas de cores e texturas, como semáforos, sinais de trânsito etc. Em uma palavra: qualquer coisa a que o lidar não seja muito sensível é complementada pela câmera. Em seguida, use algoritmos e tecnologia de reconhecimento de imagem para fornecer dados precisos para decisões de direção autônoma do veículo.
2. A pista de Tesla
Um carro autônomo na pista da Tesla inclui sensores como: Câmeras.
Tesla adota o método de "visão pura", e sua razão é que tanto os humanos quanto os animais fazem julgamentos dessa maneira.
Mas essa premissa é que tanto os humanos quanto os animais têm cérebro, e o nível de processamento visual é extremamente alto.
Enquanto o lidar não for usado, a tarefa de "percepção" não pode ser concluída 100%, e algumas situações que não foram pensadas antes serão perdidas. O que a câmera vê sob a luz de fundo é bastante distorcido. Por exemplo, quando o veículo está avançando, de repente um caminhão branco e azul cruza a estrada e fica iluminado por trás. A câmera do carro pode reconhecê-lo pelo céu azul e nuvens brancas ou pela placa acima da estrada e, em seguida, mantenha-o como está. A velocidade do carro atingiu diretamente.
Método de compensação: A tecnologia de reconhecimento de imagem, como última linha de defesa, pode identificar com precisão que o oposto é uma van, não um amplo céu azul e nuvens brancas, mesmo no caso de luz de fundo, e então executar os freios.
3. Seleção de faixa
Atualmente, a maioria das empresas automotivas escolheu a rota do Google. Exceto empresas de Internet como Google, Baidu e Uber, empresas tradicionais como Ford e General Motors e novas montadoras nacionais como Weilai e Xiaopeng, todas elas Siga o Google. Acompanhe a rota.
Então, por que Tesla é tão independente? Musk deu estas duas razões:
1) Vários sensores cooperam entre si, o que parece bom, mas haverá situações em que os resultados da percepção serão contraditórios, o que é difícil de lidar.
2) O LiDAR não pode ser usado sozinho, requer a correspondência de mapas de alta precisão, portanto os cenários de uso do carro são muito limitados e não podem ser usados globalmente.
Claro, há uma razão pela qual Musk não articulou: lidar é caro.
O preço do lidar que pode atender aos requisitos de direção autônoma pode comprar um Tesla a princípio, e o custo de uma câmera de carro é de apenas 30 dólares americanos.
Então, em qual caminho a direção autônoma se posicionará no futuro?
Estima-se que isso depende se a evolução da inteligência artificial é mais rápida ou se o custo do lidar é menor.
No momento, parece que o Google Track tem mais chances de ganhar.
A mídia nacional também está muito preocupada com isso. Todos os relatórios têm esta frase, chamada "2022 é o primeiro ano de produção em massa de LiDAR " . Isso significa que o lidar finalmente ultrapassou o estágio de teste em pequena escala e pode ser usado oficialmente como equipamento de suporte para carros autônomos e produzidos em massa. De acordo com estatísticas incompletas, pelo menos 20 modelos equipados com lidar serão anunciados em 2022, e a maioria dos carros será equipada com 3 e a maioria será equipada com 4.
1.3 Dificuldades Técnicas da Condução Autônoma L4 e Acima
A realização do nível L4 e acima da direção autônoma, em termos de hardware e software, poder de computação, algoritmos e dados, a dificuldade de contagem não é um aumento linear, mas um aumento exponencial.
Em termos de hardware , a condução autônoma possui um conjunto completo de hardware de direção autônoma, incluindo lidar, radar de ondas milimétricas, câmera, sensor ultrassônico, dispositivo de posicionamento GPS e outros equipamentos de percepção e posicionamento. Chips e plataformas de computação também são indispensáveis como cérebros de carros autônomos.
Em termos de software , o algoritmo do software de condução autônoma consiste em vários subsistemas que precisam trabalhar juntos para funcionar:
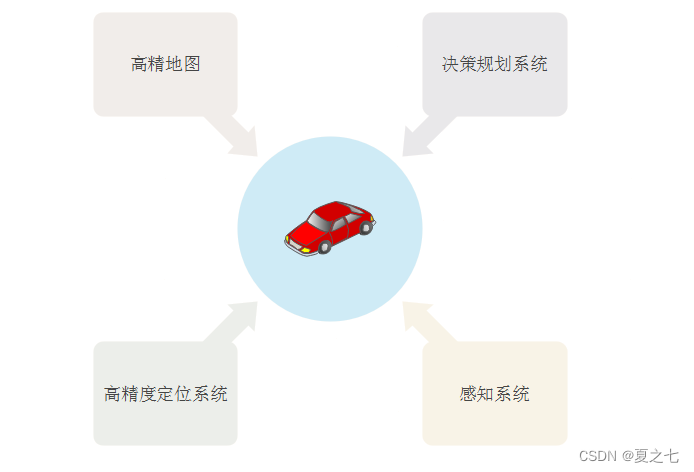
Mapa de alta precisão , fornecendo o ambiente da estrada e a topologia da estrada; a precisão absoluta e a precisão relativa estão dentro de 0,1 metros de mapas eletrônicos de alta precisão, alta frescura e alta riqueza. Os mapas de alta precisão não incluem apenas tipos de estrada, curvaturas , e faixas Informações rodoviárias estáticas, como posições de linha e sinais de trânsito, bem como informações dinâmicas em tempo real, como fluxo de tráfego e semáforos. Os mapas de alta precisão têm a função de construir a memória geral e a cognição do espaço semelhante ao cérebro humano, o que pode ajudar os carros a prever informações complexas na superfície da estrada e evitar riscos potenciais.
O sistema de posicionamento de alta precisão fornece informações precisas de localização de estradas, contando com tecnologias que incluem satélites Beidou, posicionamento de nuvens de pontos de radar a laser e posicionamento visual.
O sistema de percepção fornece informações sobre obstáculos ao redor e participantes do tráfego, incluindo velocidade, posição, orientação, limites, etc.
O sistema de planejamento de tomada de decisão usa o ambiente circundante e o sistema viário para fazer o julgamento final de direção, decidir como ceder e ultrapassar e como planejar a trajetória de condução do veículo.
1.4 Avanço essencial da direção autônoma
Avanço 1: entrada massiva de dados
O sistema de direção autônoma requer testes de escala contínua, coleta de dados e treinamento de algoritmo com base em dados massivos para fornecer uma base importante para a percepção, posicionamento e planejamento de rotas do veículo. Isso requer "alimentar" uma grande quantidade de dados. À medida que a quantidade de dados aumenta, também aumenta a precisão dos algoritmos para direção autônoma.
Os métodos de coleta de dados incluem: o veículo está equipado com sensores como câmeras, ondas de radar milimétricas e radares a laser para realizar inspeções na estrada em vários locais, várias condições da estrada e várias condições climáticas. O volume de dados de teste de um carro pode chegar a 10 TB por dia.
Geralmente, existem três modos para as empresas de direção autônoma coletarem dados:
- Modelo de ativos pesados: a empresa compra veículos, reforma-os em veículos autônomos e viaja para coletar dados;
- Modo sombra: adicione sensores ao carro para coletar dados relacionados à cena de direção do usuário (suspeita de violação de privacidade pessoal);
- Simulação virtual: Copiar o ambiente de tráfego real, as regras físicas e a lógica operacional para o mundo virtual pode melhorar muito a eficiência dos testes de direção autônoma e reduzir os custos dos testes.
Avanço 2: iteração do algoritmo baseado em dados
Mineração de dados de cena difíceis efetivos para conduzir a iteração do algoritmo.
Avanço 3: o poder de computação oferece suporte ao treinamento de algoritmo
O maior desafio ao poder de computação para direção autônoma vem do treinamento de algoritmos. O programa complexo do modelo de algoritmo mostra uma tendência de crescimento exponencial, aproximando-se constantemente do limite superior do poder de computação.
Avanço 4: Outra forma de coordenação veículo-estrada
A coordenação veículo-estrada pode tornar a condução autônoma mais segura e econômica. A coordenação veículo-estrada reduzirá o alto custo de um único veículo, fornecerá redundância de segurança mais segura e tornará o trânsito mais inteligente e conveniente. Contagem regressiva do carro".
2. Coordenação veículo-estrada
2.1 Colaboração inteligente
A colaboração veículo-estrada é como as luzes da rua e a inteligência da bicicleta é como as luzes dos carros. Sob a sinergia dos dois, o limiar para a comercialização da direção autônoma pode ser bastante reduzido e a transformação de inteligência única em inteligência colaborativa pode ser acelerada. - "Principais tecnologias e perspectivas de colaboração veículo-estrada para direção autônoma" (White Paper), 2021
inteligência de bicicleta
Contando com a visão do próprio veículo, ondas milimétricas de radar, ondas lidar e outros sensores, unidades de computação e sistemas de controle por fio para percepção ambiental, tomada de decisões de cálculo e execução de controle.
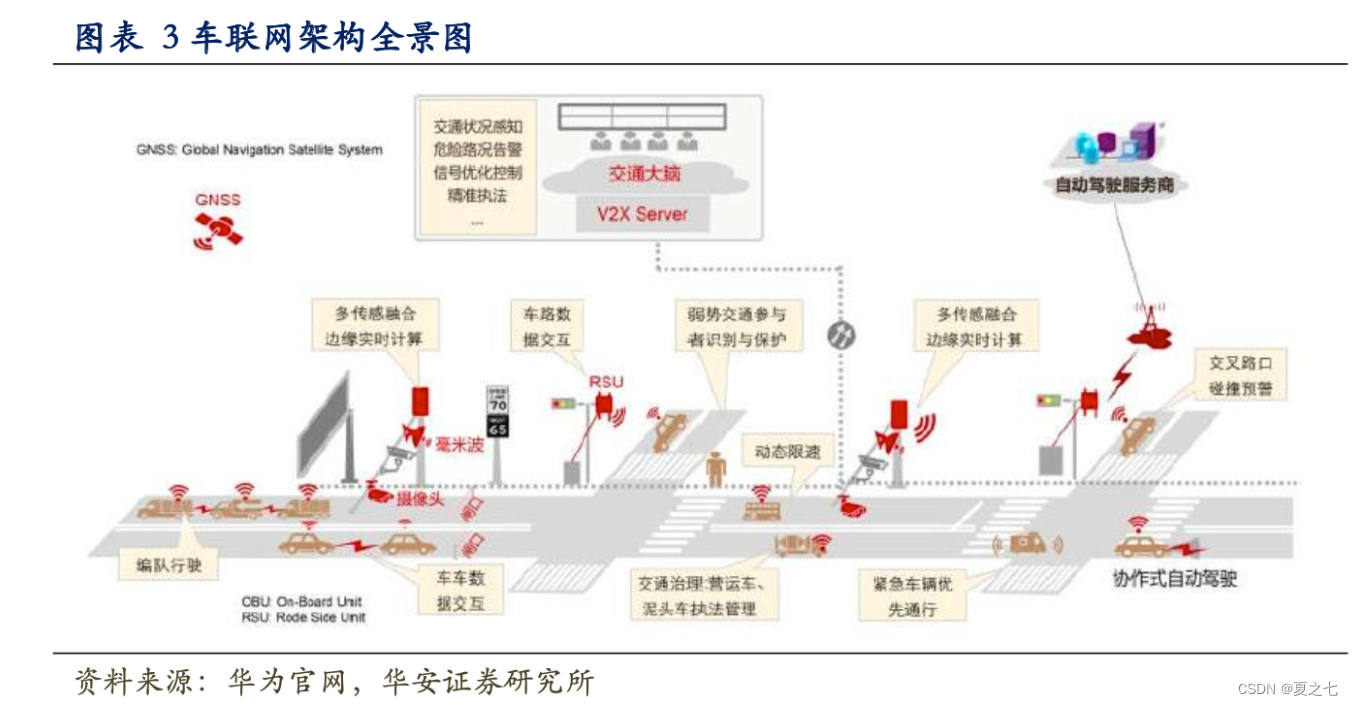
Coordenação veículo-estrada
Atualize o final da estrada para o mesmo nível de inteligência que o final do veículo e combine organicamente os elementos de participação no tráfego de pessoas-veículo-estrada-nuvem por meio da Internet de Veículos, de modo a garantir a segurança da direção automática e acelerar a maturidade de aplicações de condução automática.
Existe uma teoria 90/10 no campo da direção autônoma , que se refere aos últimos 10% dos problemas de cauda longa, que podem exigir 90% do esforço ou até mais. A coordenação veículo-estrada pode resolver o problema da cauda longa da direção autônoma.
2.2 Composição da coordenação veículo-estrada
1. Plataforma de comunicação
A comunicação veículo a veículo e a comunicação veículo a estrada exigem: um ambiente de rede com baixa latência, alta confiabilidade e acesso rápido para garantir a interação de informações em tempo real entre o veículo e o acostamento.
Existem dois padrões para a tecnologia de comunicação subjacente:
-
Comunicação dedicada de curto alcance: principalmente para tecnologia WiFi em cenários de baixa mobilidade (pagamento automático sem estacionamento, controle de acesso, gerenciamento de frota, identificação de veículos etc.), o desempenho do teste não é estável e a confiabilidade é baixa em alta velocidade e cenários de alta densidade.Delay jitter é grande.
-
C-V2X: Esta tecnologia é baseada na evolução da tecnologia de comunicação de rede celular, com forte mobilidade e confiabilidade; o ponto mais importante é que é compatível com a rota de evolução 5G e pode suportar direção automática. O ambiente de comunicação sem fio de grande largura de banda, baixa latência e alta velocidade fornecido pelo 5G melhorará muito a transmissão de informações e dados entre os veículos.
2. Camada terminal
A camada terminal é dividida em terminais de veículos e terminais rodoviários.
1) Terminal de veículos
Inclui principalmente chips de comunicação, módulos de comunicação, equipamentos terminais, protocolo V2X e software aplicativo V2X.
O terminal montado no veículo é responsável pelo processamento em tempo real de dados maciços e pela fusão de dados de vários sensores no terminal montado no veículo para garantir a condução estável e segura do veículo em várias situações complexas. Com a ajuda do atual mainstream LTE-V2X e a nova geração de tecnologia de comunicação de informações 5G-V2X, o terminal montado em veículo pode realizar uma interação abrangente de informações entre veículos, antes da estrada, entre veículos e pedestres e entre veículos e a nuvem . Pode-se dizer que o terminal é o centro de comunicação entre a rede do veículo e a rede externa.
Unidade de bordo: É a unidade central de comunicação do veículo e um dos principais dispositivos para realizar a comunicação V2X entre o carro e o mundo exterior. É conectado ao equipamento de teste de direção para ler, receber e enviar dados.
2) beira de estrada inteligente
Responsável pela coleta de informações sobre a condição da estrada e computação de ponta, percepção digital completa das condições da estrada e implantação de poder de computação em nuvem nas proximidades. A unidade de beira de estrada tem três funções de coleta, transmissão e processamento de informações de tráfego.É a infraestrutura principal do sistema de coordenação veículo-estrada e um centro de troca de informações para detectar as características da rede rodoviária e os participantes da estrada.
Unidade de comunicação na estrada: responsável pela comunicação com a unidade de bordo e a unidade de computação na estrada, que equivale a uma estação base móvel.
Unidade de computação na estrada: atua como um cérebro límbico, recebendo informações da unidade de percepção na estrada, recebendo informações da unidade de bordo e outras unidades de computação na estrada e, em seguida, realizando uma série de processamento, como análise, detecção, rastreamento e identificação . Os principais componentes incluem: coleta e detecção, cálculo e tomada de decisão, convergência de comunicação, autenticação de segurança, detecção de status e outros módulos.
Unidade de percepção na estrada: inclui informações ambientais como radar, câmera, semáforos e sinais.
3. Computação de borda MEC
A computação de borda refere-se a um modelo de computação que distribui tarefas como computação, armazenamento e comunicação para a borda da rede perto da borda do cenário do aplicativo e fornece serviços inteligentes de ponta nas proximidades.
O servidor de computação de borda pode aproveitar as vantagens da implantação de curta distância, obter informações sobre as condições da estrada em tempo hábil e distribuí-las para diferentes sistemas de acordo com diferentes tipos de informações sobre as condições da estrada: se for uma emergência, será
enviado diretamente ao veículo/equipamento rodoviário para lembrar todas as partes de lidar com isso a tempo
; Os dados que podem afetar a situação geral são relatados à nuvem central, e a computação em nuvem central decide se deve enviá-los adicionalmente. Ao mesmo tempo, a nuvem central de coordenação desenha o mapa geral da situação do tráfego.
4. Plataforma de controle de nuvem
A plataforma de controle de nuvem inclui uma plataforma básica de controle de nuvem e uma plataforma de aplicativo de controle de nuvem.
A plataforma de controle em nuvem fornece gerenciamento e controle de equipamentos, fusão de dados e troca de dados em nuvem, liberação global de informações de eventos, fornece serviços para diferentes níveis de conexão de rede inteligente e veículos autônomos e fornece organizações de gerenciamento e serviço com operação de veículos, equipamentos básicos, tráfego ambiente, tráfego Dados básicos dinâmicos, como gerenciamento, é uma plataforma de suporte em nuvem que suporta os requisitos reais de aplicação de veículos inteligentes em rede.
2.3 Integração de Condução Autônoma e Colaboração Veículo-Estrada
.
1. Detecção completa do elemento de tráfego
A condução autônoma de um único veículo é afetada por fatores como o ângulo de percepção do sensor do lado do veículo e o movimento em tempo real do veículo. A velocidade da detecção de veículo em baixa velocidade na beira da estrada pelo veículo autônomo é imprecisa, como dar marcha à ré lentamente na beira da estrada e o veículo estiver saindo da estrada.
Percepção e posicionamento de todos os elementos de tráfego, incluindo percepção cooperativa estática de ponto cego/oclusão, percepção cooperativa de veículos além do horizonte e detecção de veículos em baixa velocidade na beira da estrada. A percepção e o posicionamento de todos os elementos de tráfego podem auxiliar a condução automática de um único veículo para evitar os defeitos mencionados acima.
2. Percepção de incidentes de trânsito
O ângulo de percepção de um veículo autônomo de veículo único é limitado, e a detecção precisa de obstáculos baixos requer uma distância relativamente curta para ser realizada, o que pode facilmente fazer com que o veículo freie repentinamente.
Percepção de eventos de tráfego rodoviário, incluindo estacionamento ilegal, reconhecimento de eventos de "carro morto", reconhecimento de eventos de filas e reconhecimento de eventos de derramamento na estrada (balde de cone, carga).
3. Percepção de fusão de luzes de sinalização na estrada
Veículos autônomos de veículo único são obtidos por IA visual, mas ainda existem muitas deficiências nesse método, e a capacidade de reconhecer luzes de sinalização é limitada, especificamente em: 1) Luzes de sinalização com formato especial não podem ser reconhecidas;
3
)
É é facilmente restringido pelo ambiente externo, especialmente na luz de fundo, neblina, poeira, noite e outros ambientes, e a dimensão de dados de reconhecimento é limitada; 4) As informações de
contagem regressiva não são reconhecidas com precisão.
A percepção de fusão das luzes de sinalização na estrada pode transmitir os dados das luzes de sinalização de interseção para o terminal do veículo, para que o veículo possa tomar decisões de direção oportunas: 1)
Mesmo se a frente estiver bloqueada, o veículo ainda pode usar a luz de interseção em tempo real dados de contagem regressiva de status e liberação retornados pelo equipamento de beira de estrada Faça previsões corretas;
2) Além dos dados de status de luz em tempo real e dados de contagem regressiva, o plano de operação da máquina de sinalização pode até ser fornecido ao terminal do veículo; a vantagem disso é que depois que o veículo passa por um cruzamento, ele pode ser combinado com a próxima luz de sinalização de cruzamento De acordo com o plano operacional e a distância entre dois cruzamentos, uma previsão é feita, a velocidade do veículo é ajustada e uma onda verde é realizada em o sentido individual.
2.4 Desafios enfrentados pela coordenação veículo-estrada
Desafio 1 : O sistema complexo formado pela profunda integração da direção autônoma e da coordenação veículo-estrada precisa construir um sistema de segurança funcional baseado em engenharia e um sistema de segurança funcional esperado.
O complexo sistema formado por condução autônoma e coordenação veículo-estrada precisa resolver uma série de problemas, como acesso móvel em larga escala, interoperabilidade multinível, baixa latência, alta segurança e confiabilidade, especialmente para vários cenários complexos. É necessário esclarecer a arquitetura do sistema, as funções do sistema, os cenários de aplicação e o conteúdo do serviço e apresentar requisitos funcionais claros, requisitos de desempenho, requisitos de dados e requisitos de segurança para as instalações do sistema para garantir a segurança e a confiabilidade do veículo autônomo colaborativo rodoviário. dirigindo.
Desafio 2 : O desenvolvimento da inteligência rodoviária e da inteligência de direção não é coordenado o suficiente. É necessário construir estradas inteligentes de alto nível para atender a direção automática colaborativa veículo-estrada, gerenciamento de tráfego inteligente e construção de cidade inteligente.
Desafio 3 : É necessário explorar soluções de tecnologia de comunicação veículo-estrada mais eficientes e econômicas para resolver uma série de problemas como baixa penetração de veículos e dificuldade de promoção comercial em larga escala.
Desafio 4 : A condução autônoma colaborativa entre veículos e estradas requer interconexão entre setores e regiões e exploração e desenvolvimento contínuos de inovação de serviços de aplicativos e inovação de modelos de negócios. Em termos de interconexão e interoperabilidade, ainda existem muitos fatores influenciadores ou restritivos no processo específico de promoção da condução autônoma cooperativa veículo-estrada, como aplicação aberta de dados do veículo, reutilização de facilidades de percepção da estrada, uso de dados de controle de sinalização rodoviária e abertura de portagens rodoviárias, etc., que devem ser aprofundadas Investigação e evolução passo a passo.
Desafio 5 : Políticas, regulamentos e construção padrão são os principais fatores que conduzem e apoiam o desenvolvimento da condução autônoma colaborativa veículo-estrada. Pesquisa, formulação e revisão de leis e regulamentos relevantes devem ser realizados com antecedência de acordo com os diferentes estágios do desenvolvimento de condução automática do sistema veículo-estrada.