1. Representação de dados
1.1 conversão básica
1.
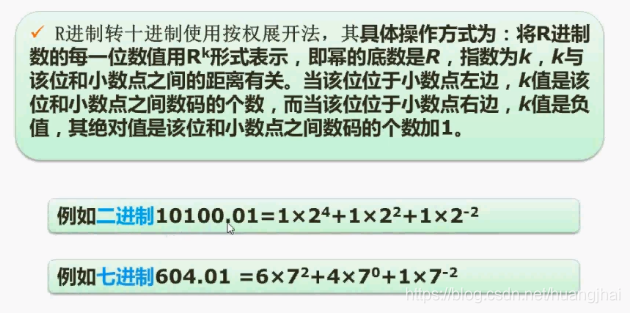
Converta a base R em decimal
2. Decimal para base R
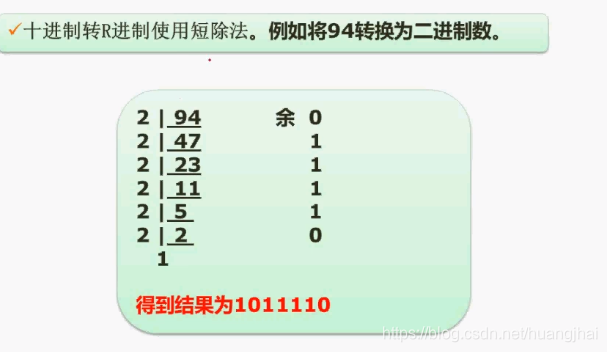
Decimal para base R usando divisão curta
3. Binário para octal e hexadecimal
Binário da direita para a esquerda corresponde a um dígito octal a cada 3 dígitos, o seguinte número binário 10001110 corresponde ao octal 216
Cada 4 bits da direita para a esquerda em binário corresponde a um dígito hexadecimal
Em hexadecimal: A=10, B=11, C=12, D=13, E=14 , F=15
O seguinte número binário 10001110 corresponde ao hexadecimal 0X8E, e outras formas de hexadecimal representam 8EH.

1.2 Código original, código inverso, código complementar, mudança de código
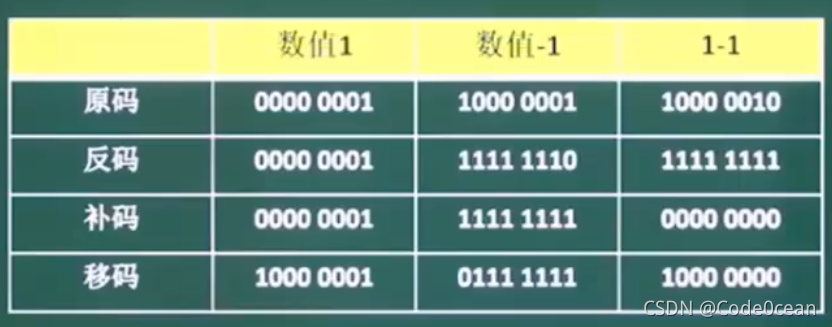
O código original: o código de máquina, a forma binária do valor, o bit mais alto (bit de sinal) indica o sinal: 0 é um número positivo, 1 é um número negativo
código inverso: o código original de um número positivo é o mesmo como o código inverso, e o código inverso de um número negativo é diferente, exceto para o bit mais alto. Se for alterado para fora, todos os bits seguintes são invertidos.
Código de complemento: O código original de um número positivo é igual ao código de complemento.O código de complemento de um número negativo = código inverso + 1. O computador usa o código de complemento para adição e subtração.
Deslocamento de código: Com base no código complementar, o bit de sinal é invertido
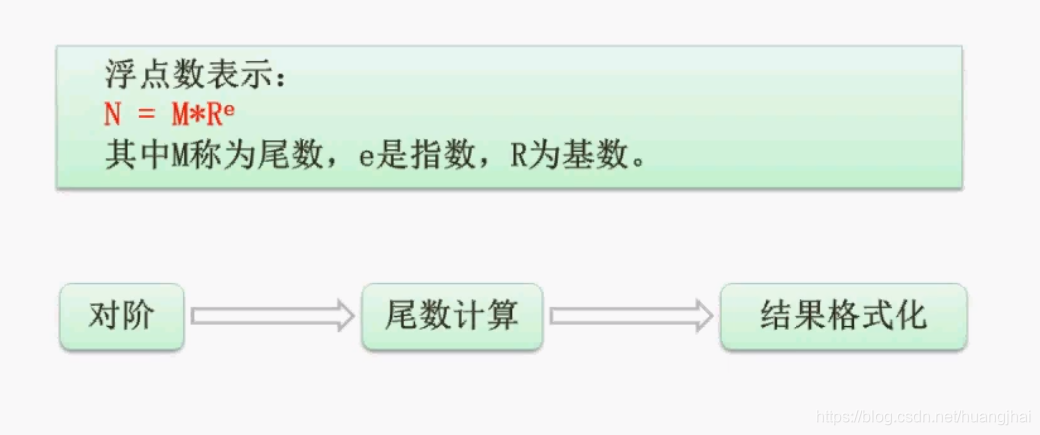
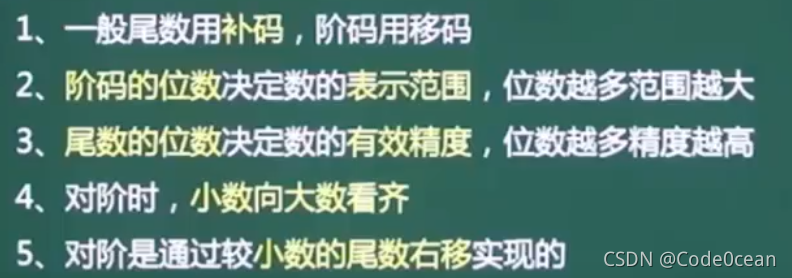
1.3 Aritmética de ponto flutuante
Números naturais terminados em 1 a 9
Ordem pequena para ordem grande: Ao calcular, o número de ponto flutuante pequeno é convertido para o número representado pela mesma notação científica, e o cálculo é realizado com o número de ponto flutuante grande.
Por exemplo: 3,14×10^3+1,2×10^5=0,0314×10^5+1,2×10^5
Recursos de operação de ponto flutuante:
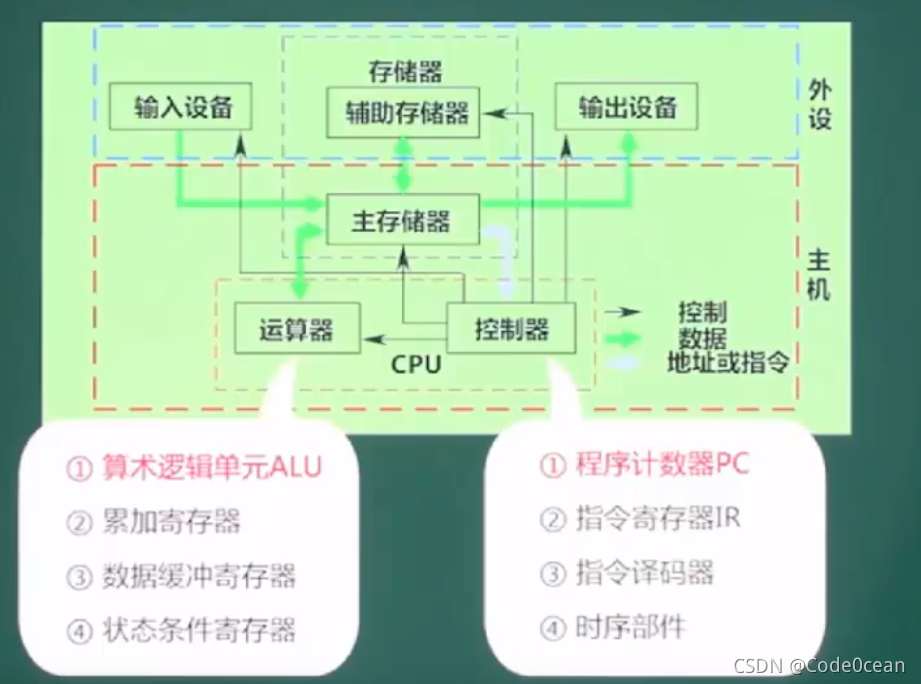
2. Estrutura do Computador
O diagrama de estrutura básica do host:
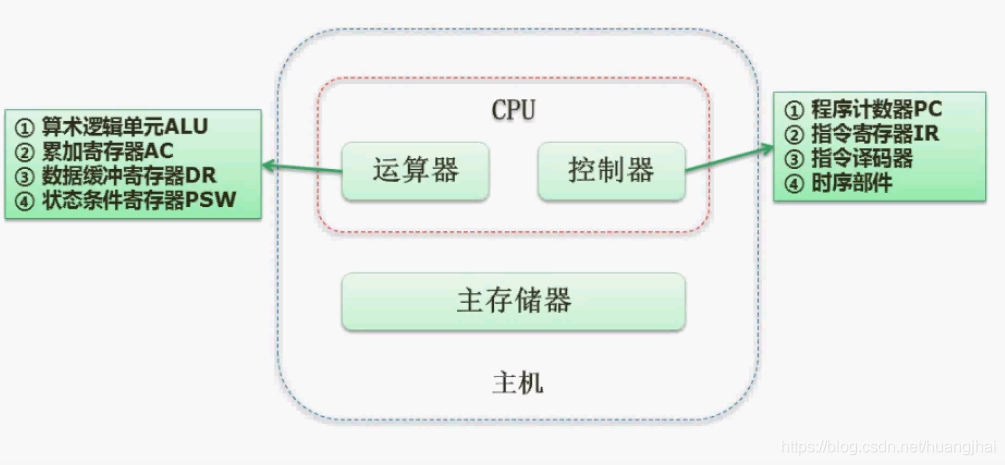
Foco: unidade aritmética e controlador. Os papéis de seus diferentes componentes.
2.1 CPU
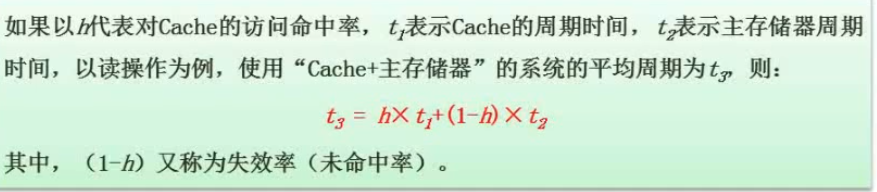
Muitas vezes, é necessário configurar caches de vários níveis dentro e fora da CPU, e o objetivo principal é melhorar a eficiência do acesso da CPU aos dados ou instruções da memória principal.
No processo de execução do computador, é necessário salvar a cena ao realizar o processamento de interrupção, e sua finalidade é retornar corretamente ao programa interrompido para continuar a execução.
O mapeamento entre o cache e a memória principal é realizado automaticamente pelo hardware, e a interação entre a memória principal e a memória auxiliar é realizada pela combinação de hardware e software.
No processo de execução de instruções, a CPU modificará automaticamentecontador de programa, para que sempre mantenha o endereço da próxima instrução a ser executada. (Questões do exame para o segundo semestre de 2018.01)
- Registrador de instrução: Um registrador para colocar temporariamente instruções de programa obtidas da memória, que é usado para armazenar uma instrução que está sendo executada no momento e que é lida do armazenamento principal.
- Registrador de endereço: O registrador de endereço é utilizado para armazenar o endereço da unidade de memória acessada pela CPU atual.
- Decodificador de instruções: Uma instrução buscada pelo decodificador de instruções da memória é enviada para o registrador de instruções através do barramento de dados.A principal função do decodificador é decodificar as instruções.
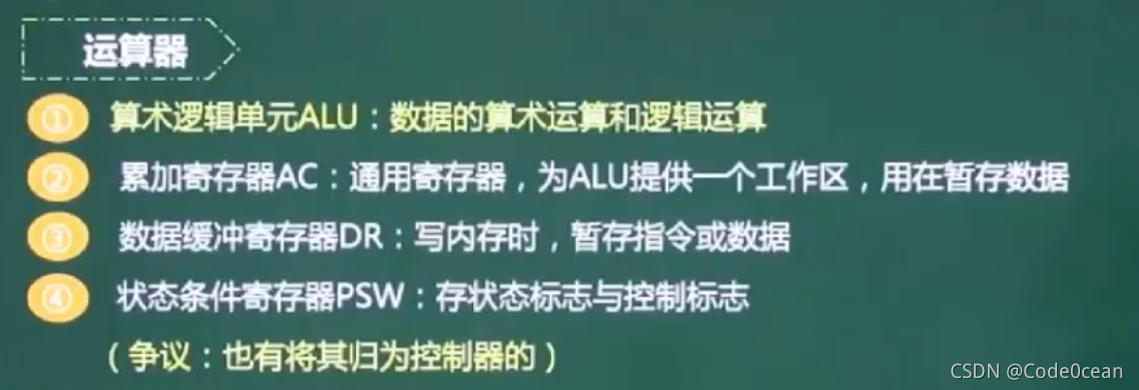
calculadora
A unidade aritmética é usada para o trabalho aritmético da CPU.A unidade aritmética é composta principalmente pela unidade lógica aritmética ALU, o registrador de acumulação, o registrador de buffer de dados e o registrador de condição de estado.
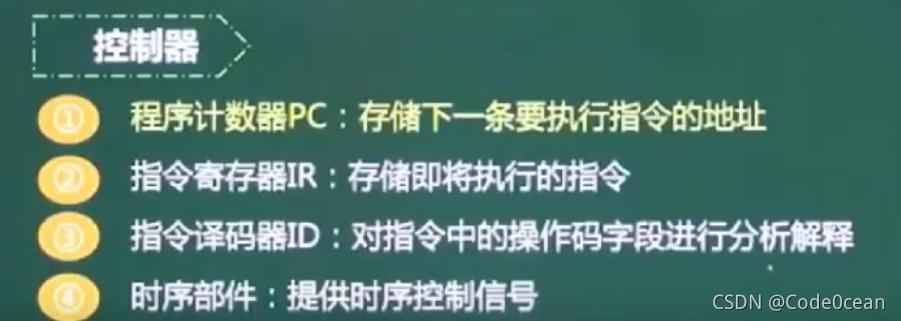
controlador
O controlador da CPU é usado para o trabalho de controle de toda a CPU. Ele é responsável por acessar sequencialmente as instruções do programa, instruções de decodificação e coordenar outros dispositivos. O controlador geralmente consiste em um contador de programa, um registrador de instruções, um decodificador de instruções, um status /registrador de condição, e um gerador de temporização. , composto por um gerador de sinal de micro-operação.
2.2 Memória principal
A memória principal, ou seja, a memória usa principalmente a memória dinâmica de acesso aleatório DRAM, o Cache usa a memória estática de acesso aleatório SRAM e a EEPROM é uma memória somente leitura programável apagável eletricamente. Os discos rígidos são armazenamento externo.
2.3 DMA
O método DMA também se tornou um método de acesso direto à memória principal. A idéia é permitir a troca direta de dados em massa entre a memória principal e o dispositivo de E/S através do "controlador DMA (DMAC)", exceto no início e no final do transferência de dados, todo O processo não requer intervenção da CPU.
3. Classificação de Arquitetura de Computadores - Taxonomia Flynn
A taxonomia de Flynn é uma taxonomia de arquitetura de computador
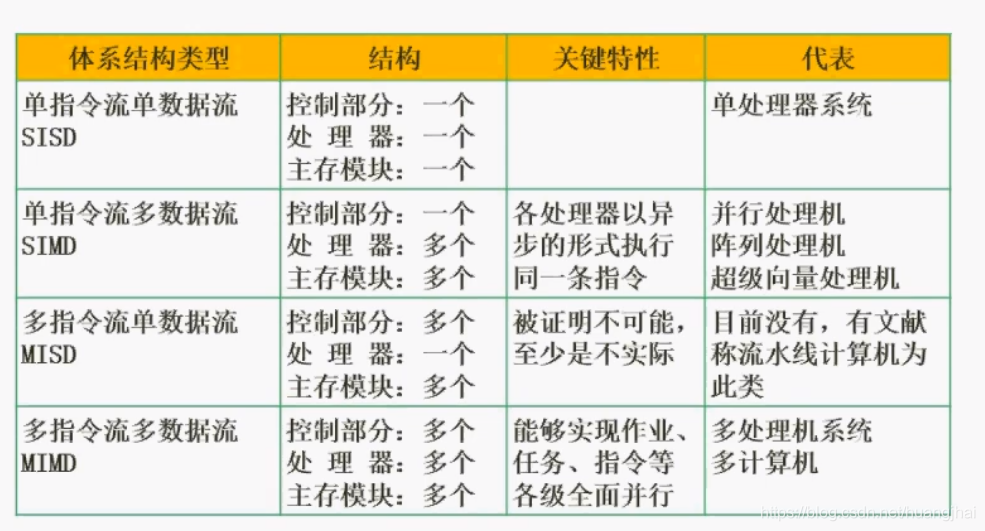
Ênfase: O representante de um único fluxo de instruções e múltiplos fluxos de dados é o processador de matriz
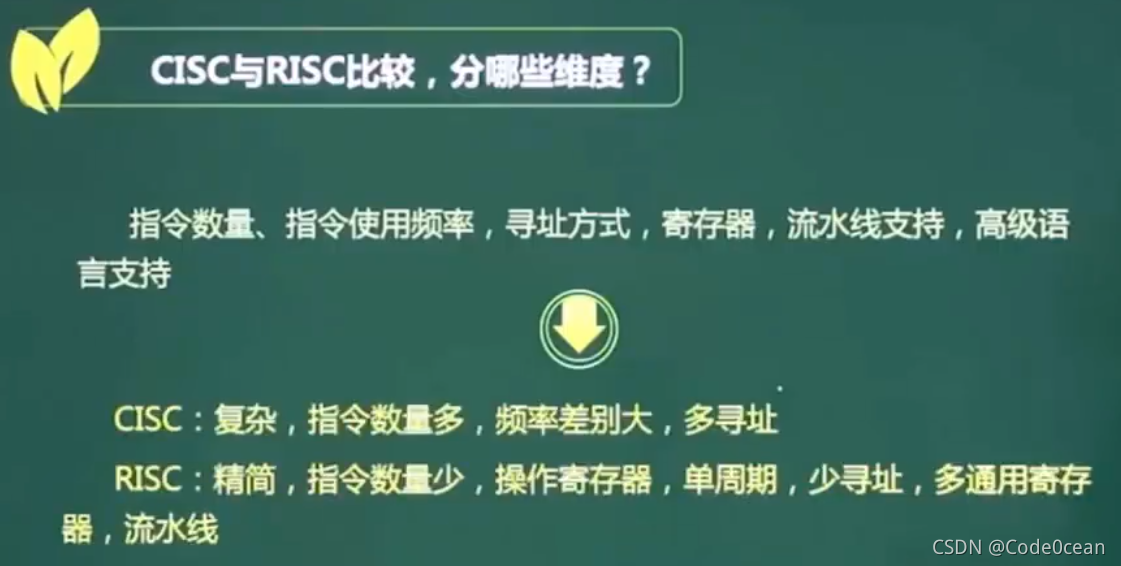
4. CISC e RISC (tipo de sistema de instrução)
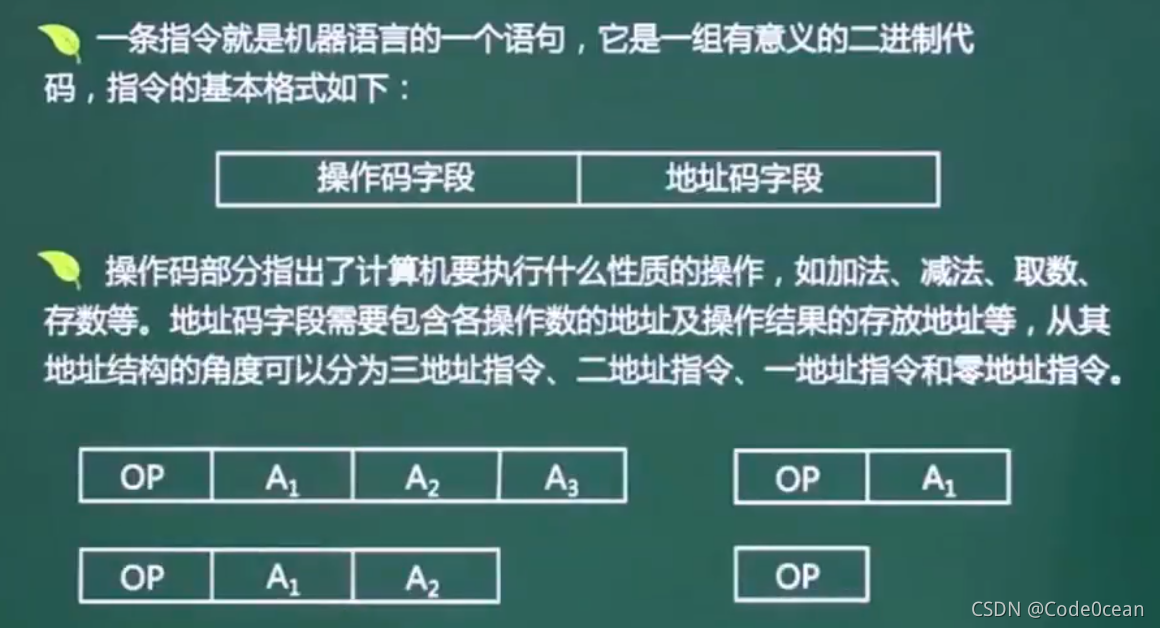
4.1 Instruções
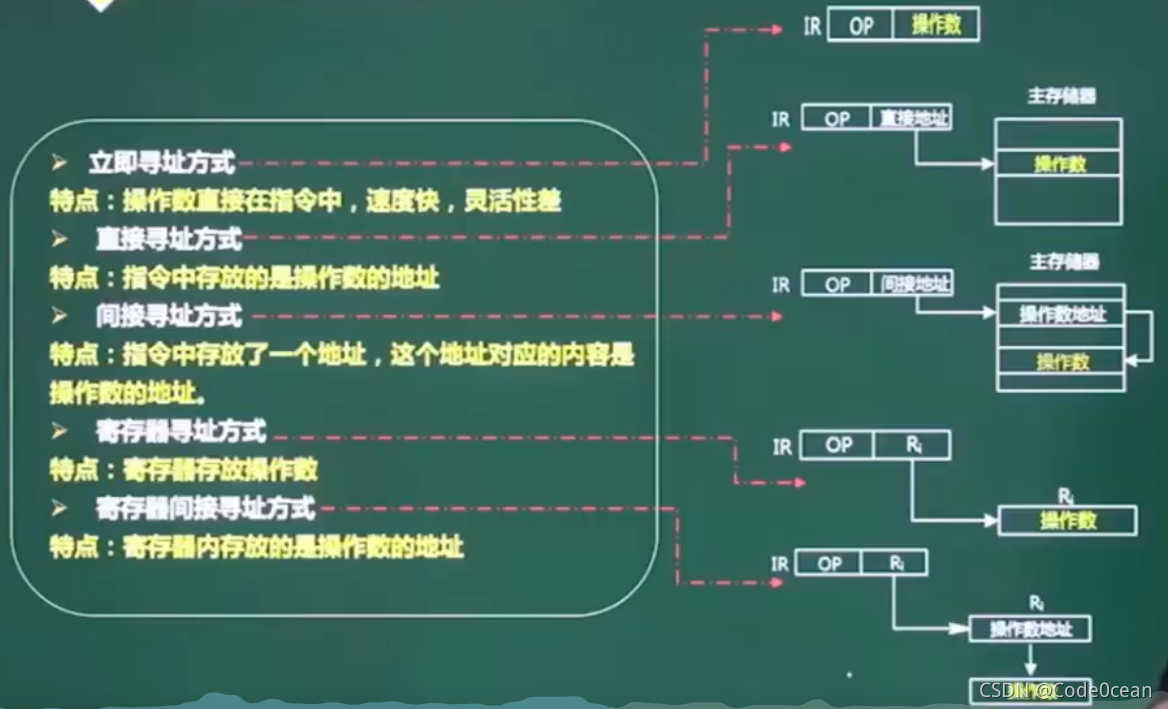
4.2 Modo de endereçamento
4.3 Diferenças entre CISC e RISC
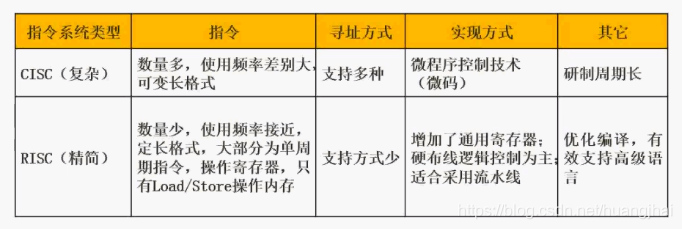
O sistema de instrução reduzido RISC tem poucos modos de endereçamento, geralmente suporta apenas o modo de endereçamento de registro, modo de endereçamento de número imediato e modo de endereçamento relativo.
5. Oleoduto
5.1 Conceitos Básicos
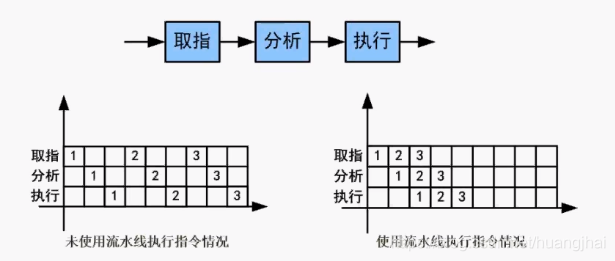
Pipelining significa que quando o programa é executadoVárias instruções sobrepõem a operaçãoUma tecnologia de implementação de processamento quase paralelo. O processamento simultâneo de vários componentes refere-se a instruções diferentes, podendo funcionar para diferentes partes de várias instruções ao mesmo tempo, de modo a melhorar a taxa de utilização de cada componente e a velocidade média de execução das instruções.
Tal como a operação básica da instrução: valor->análise->operação de execução. As instruções 1, 2 e 3 completam as operações de aquisição, análise e execução de valor, respectivamente.
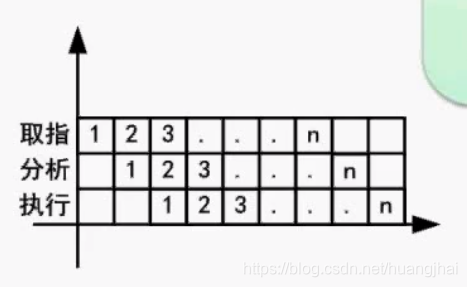
5.2 Computação de Pipeline
O ciclo do gasoduto éO período de tempo que a instrução leva mais tempo para ser executada。
Fórmula de cálculo do tempo de execução do pipeline
1 tempo de execução da instrução + (número de instruções - 1) * ciclo de pipeline
①Fórmula teórica: (t1+t2+…tk)+(n-1)*ciclo de pipeline, n é o número de instruções
②Fórmula prática: (k+n-1)*ciclo de pipeline, k é o número de etapas executadas pela instrução

Por exemplo:

O ciclo do pipeline é 2ns
Fórmula teórica=(2+2+1)*(100-1)*2=203Fórmula prática
=(3+100-1)*2=204
Extensão:
pipeline superescalar, mais de um pipeline (grau > 1)

Cálculo da taxa de transferência do pipeline
A taxa de transferência do pipeline refere-se ao número de tarefas concluídas pelo pipeline ou ao número de resultados de saída em unidade de tempo. A fórmula mais básica para calcular o rendimento do pipeline é a seguinte:
Rendimento máximo do pipeline: 1/ciclo do pipeline
Cálculo de Aceleração do Pipeline
O cálculo de aceleração do pipeline refere-se à conclusão do mesmo lote de tarefas, e a proporção de todo o tempo sem usar o pipeline para o tempo gasto usando o pipeline é chamada de taxa de aceleração do pipeline. A fórmula básica para calcular a aceleração do pipeline é a seguinte:
Como acima: S=(2+2+1)*100/203
Eficiência do pipeline
A eficiência do pipeline refere-se à utilização do equipamento do pipeline. No diagrama de espaço-tempo, a eficiência do pipeline é definida como a razão entre a área de espaço-tempo ocupada por n tarefas para a área de espaço-tempo total de k segmentos de pipeline.
A fórmula para calcular a eficiência da tubulação é a seguinte:
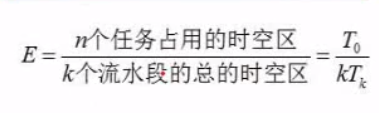
Por exemplo: A
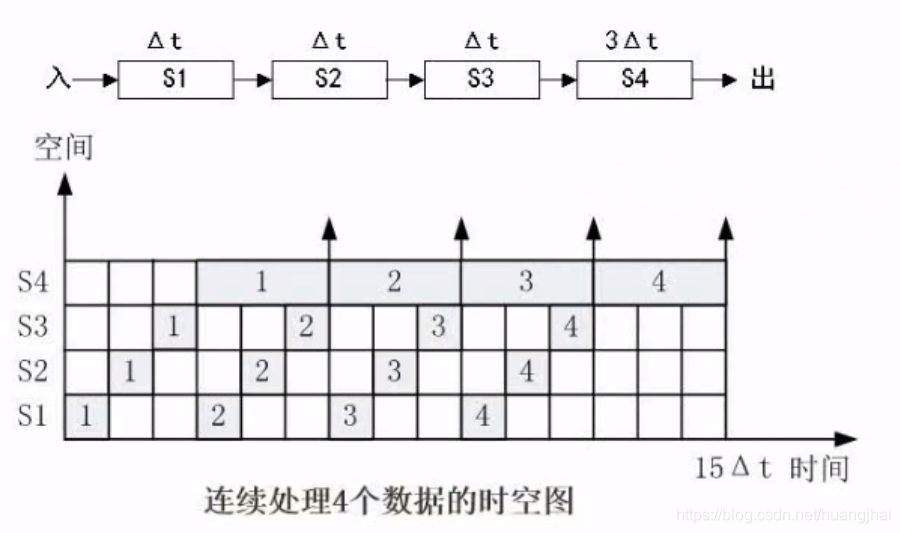
eficiência da tubulação é (△t+△t+△t+3*△t) 4/15△t 4=24/60=40%
6. Estrutura Hierárquica de Armazenamento do Computador
A estrutura hierárquica do armazenamento do computador é mostrada na figura:
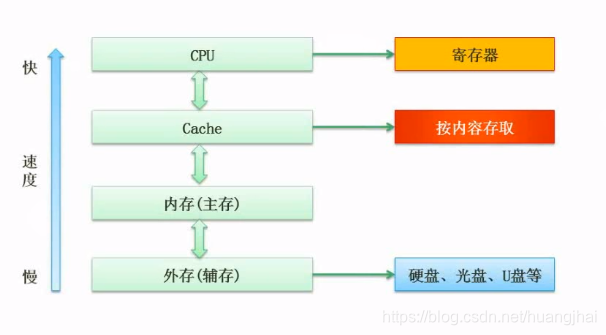
esconderijo
Na arquitetura do sistema de armazenamento do computador, o Cache acessa o nível mais rápido (se houver um registro, selecione o registro). A base para o uso de caches para melhorar o desempenho do sistema é o princípio da localidade do programa.
A função do cache: melhorar a taxa de entrada e saída de dados da CPU e romper o gargalo de von Neumann, ou seja, a limitação de largura de banda de transmissão de dados entre a CPU e o sistema de armazenamento. Mapeamento Associativo Direto do
Mapeamento de Endereços
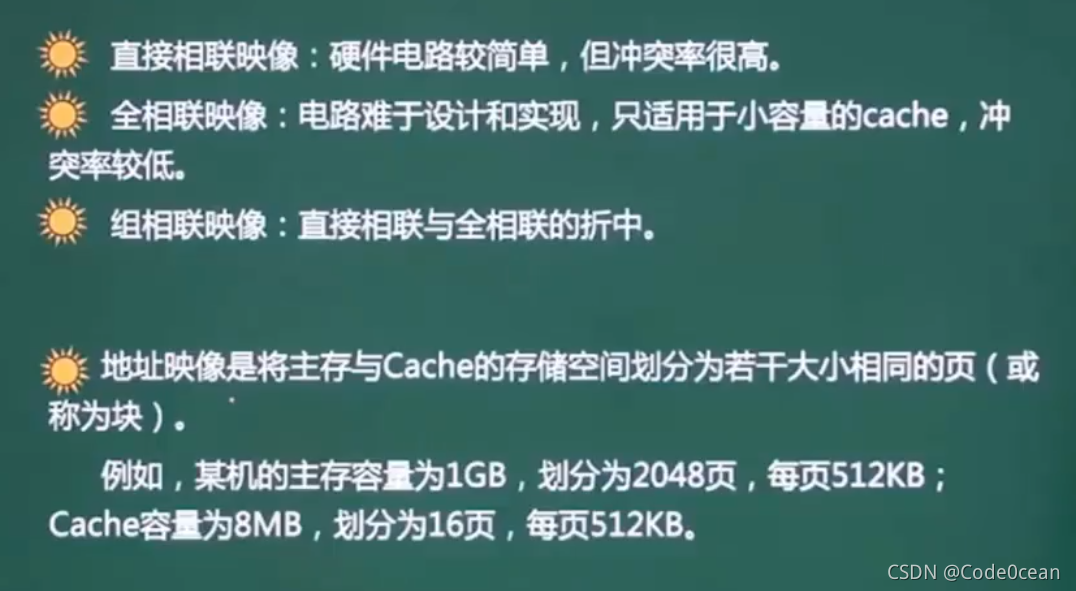
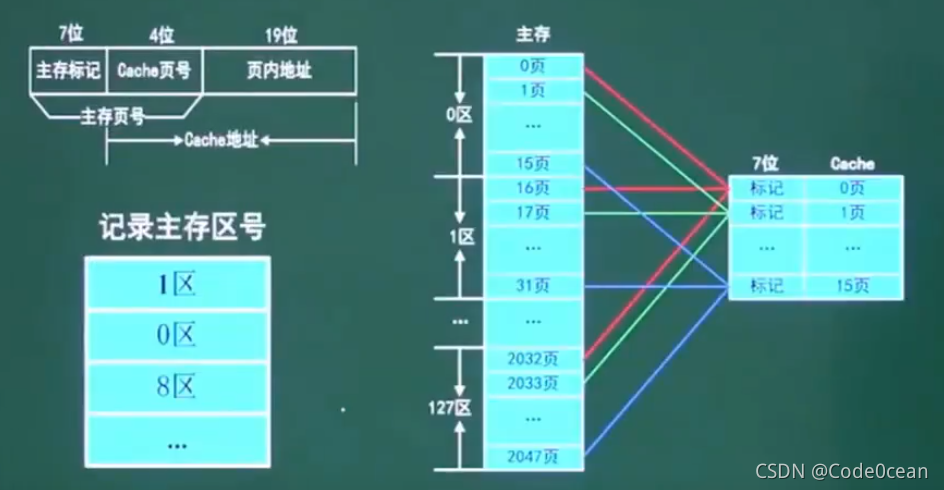
imagem totalmente associativa
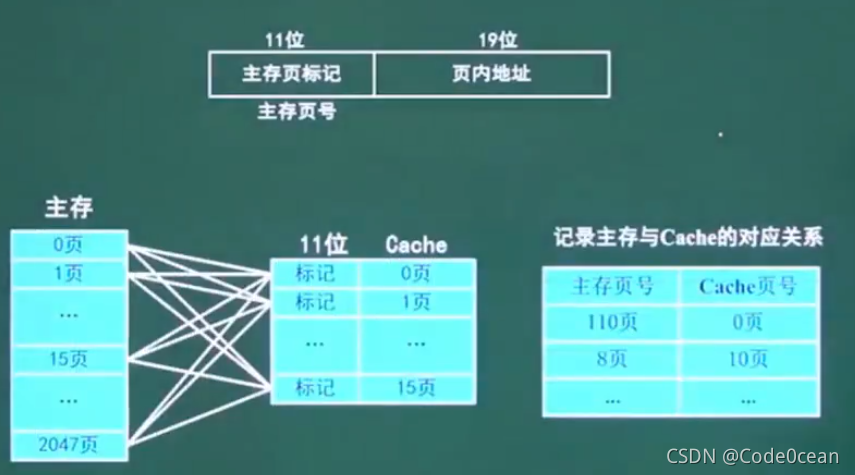
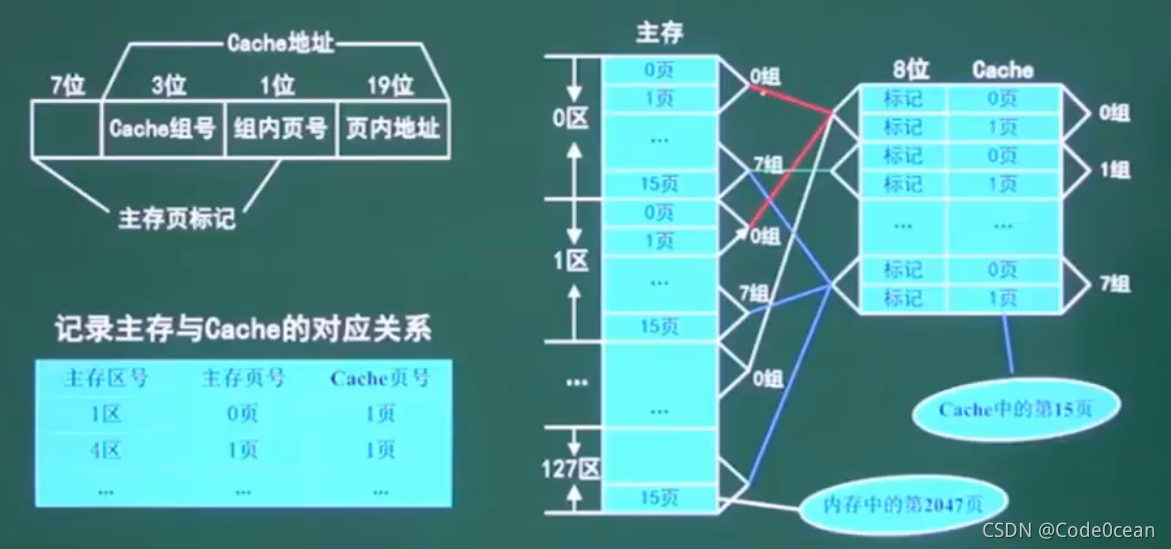
imagem associativa do grupo
crise de tempo e crise de espaço
Teoria do conjunto de trabalho: Um conjunto de trabalho é uma coleção de páginas que são acessadas com frequência enquanto um processo está em execução.
O princípio da localidade refere-se à tendência de um computador usar os dados usados mais recentemente ao executar um programa. O princípio da localidade tem duas manifestações:
- A localidade temporal significa que, se uma instrução em um programa for executada uma vez, essa instrução poderá ser executada novamente em um futuro próximo.
- A localidade espacial significa que uma vez que um programa acessa uma unidade de armazenamento, é mais provável que suas unidades de armazenamento próximas sejam acessadas em um futuro próximo.
Memória principal (memória)
A memória principal (memória) é dividida em duas categorias: memória de acesso aleatório (RAM) e memória somente leitura (ROM)
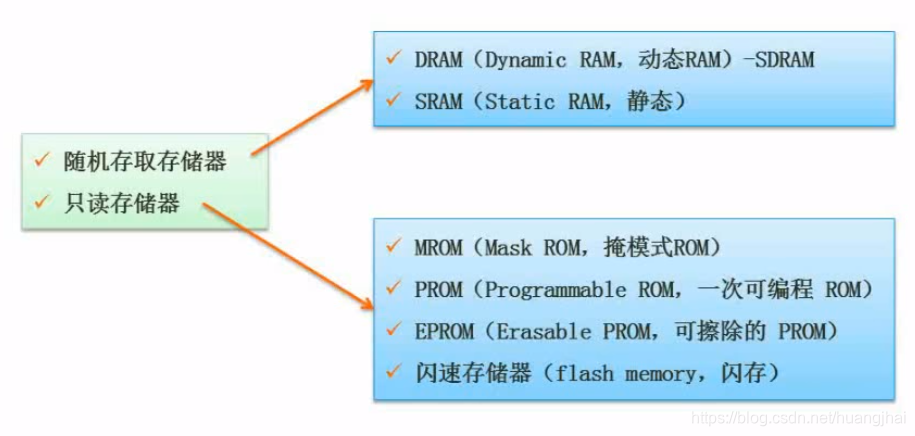
memória de acesso aleatório
A memória de acesso aleatório também é conhecida como memória de leitura/gravação ou memória principal, onde são armazenados os programas e dados requeridos pela CPU durante a execução do programa. É uma memória volátil porque os dados são perdidos quando a energia é desligada.
ROM
A memória somente leitura (memória somente leitura) é usada para armazenar informações críticas necessárias para o sistema operacional, como programas necessários para iniciar o computador. A ROM sempre retém seus dados e não é facilmente perdida.
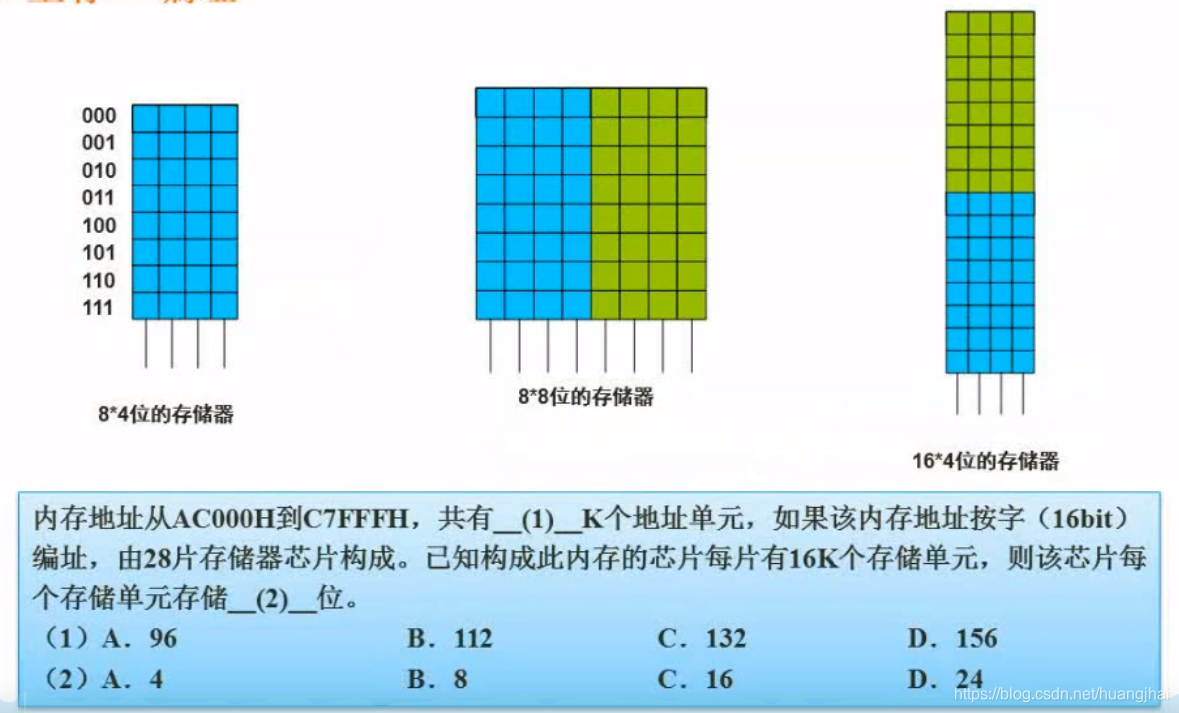
Endereçamento e computação da memória principal
endereçamento da memória principal
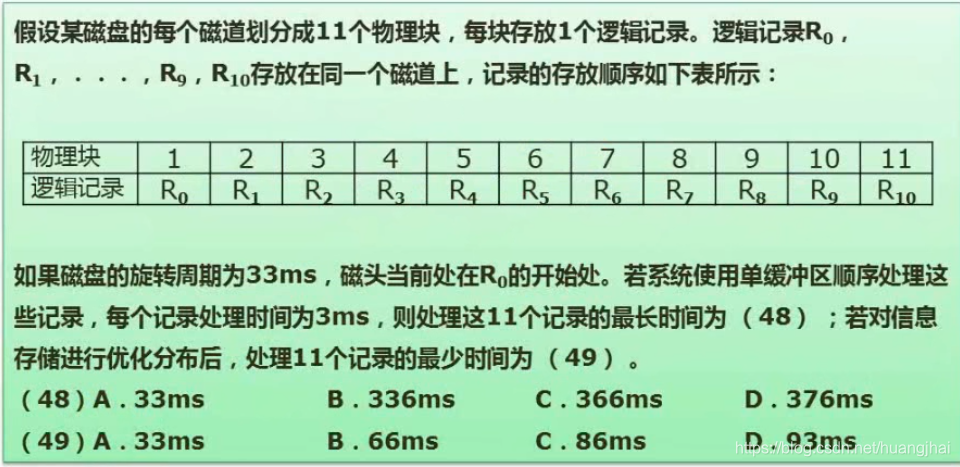
7. Disco
pergunta:
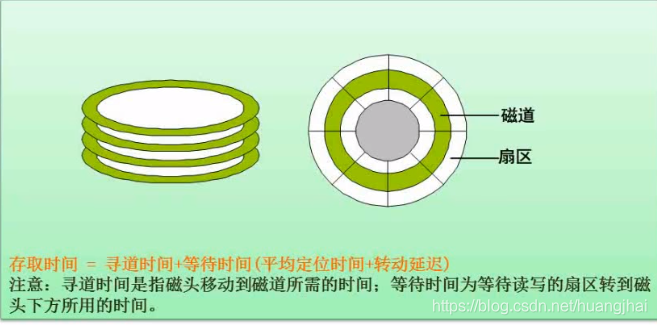
Estrutura e parâmetros do disco
Como funcionam os discos
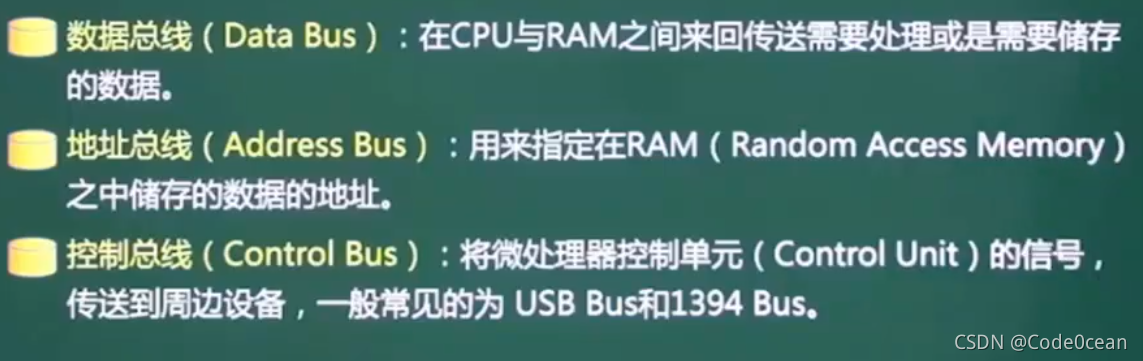
8. Barramento de computador
Um barramento permite que apenas um dispositivo transmita por vez, mas vários dispositivos recebam.O barramento interno do computador é uma estrutura de três barramentos, que são o barramento de endereços, o barramento de dados e o barramento de controle.
Dependendo de onde o ônibus está localizado, o ônibus é geralmente dividido em três tipos:
- Barramento interno
- Barramento do sistema: barramento de dados, barramento de endereço, barramento de controle
- barramento externo
Classificação do barramento do sistema:
9. Análise de confiabilidade do sistema
Sistema tandem
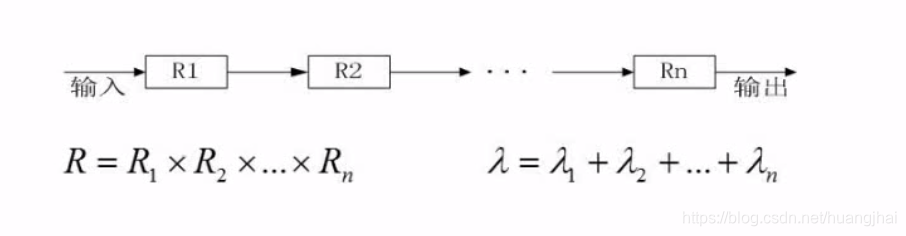
R(n) representa a confiabilidade de um único sistema
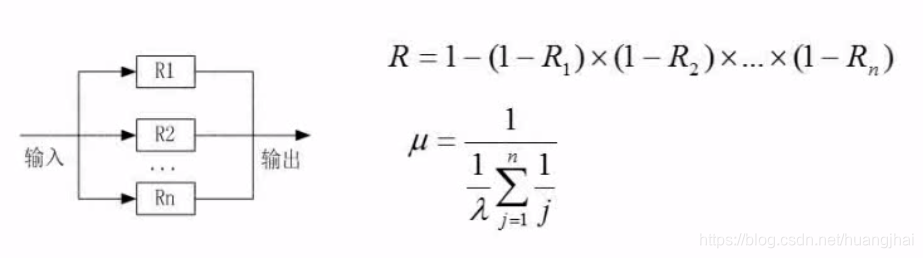
Sistema paralelo
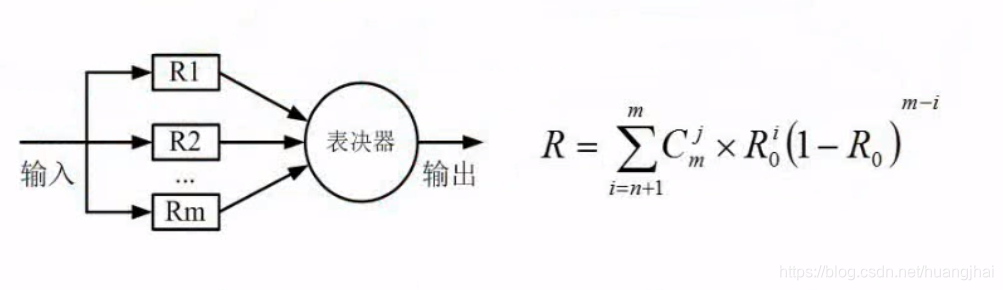
Sistema redundante modular
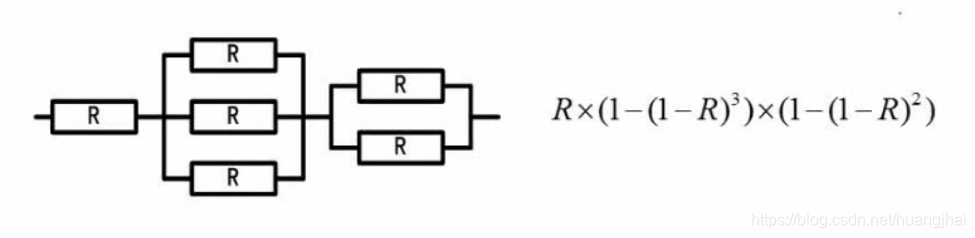
Sistema híbrido
10. Verifique o código
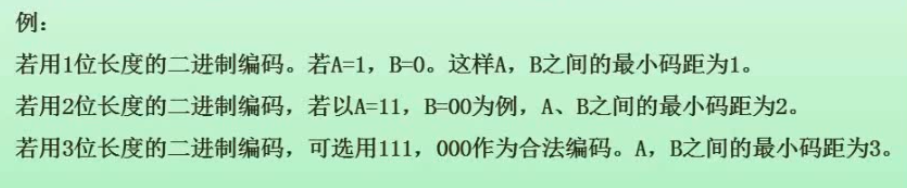
Distância de código: Qualquer tipo de código é composto de muitas palavras de código, e o número binário menos alterado entre quaisquer duas palavras de código é chamado de distância de código do código de verificação de dados.
Por exemplo, se 16 estados são representados por binários de 4 bits, existem 16 palavras de código diferentes.Neste momento, a distância do código é 1, como 0000 e 0001, e a conversão entre eles só precisa mudar um bit binário.
A distância de código de um sistema de codificação é a distância mínima entre quaisquer (todas) duas palavras de código em todo o sistema de codificação.
Por exemplo:
Qual é a relação entre a distância do código e a detecção e correção de erros?
- Para detectar erros e em um grupo de códigos, a distância mínima de código d deve satisfazer: d>=e+1
- Para corrigir erros t em um grupo de código, a distância mínima de código d deve satisfazer: d>=2t+1
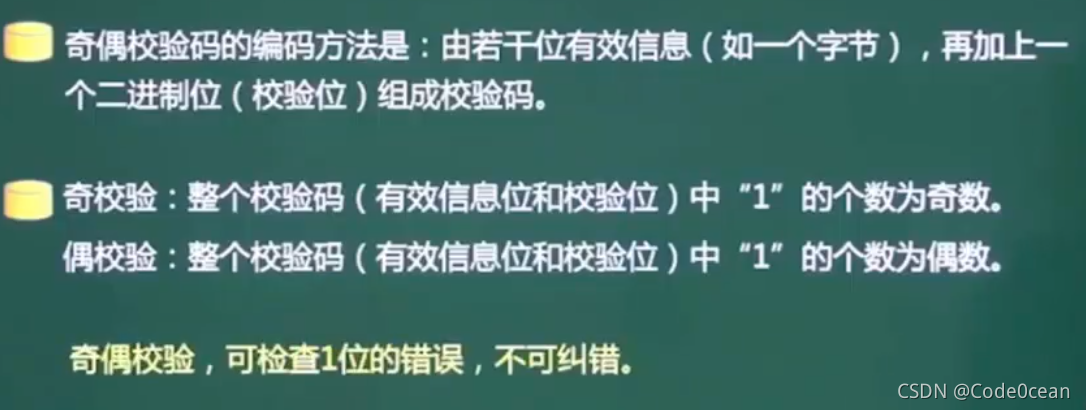
paridade
A verificação de paridade detecta erros, mas não corrige erros
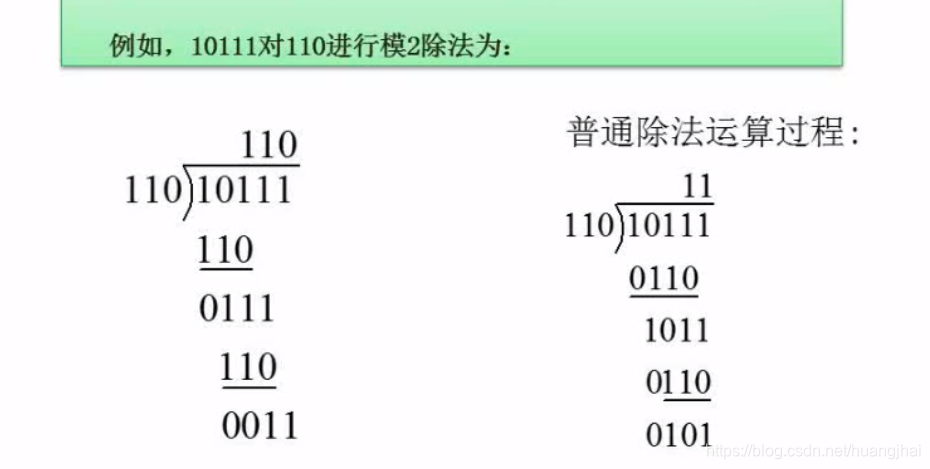
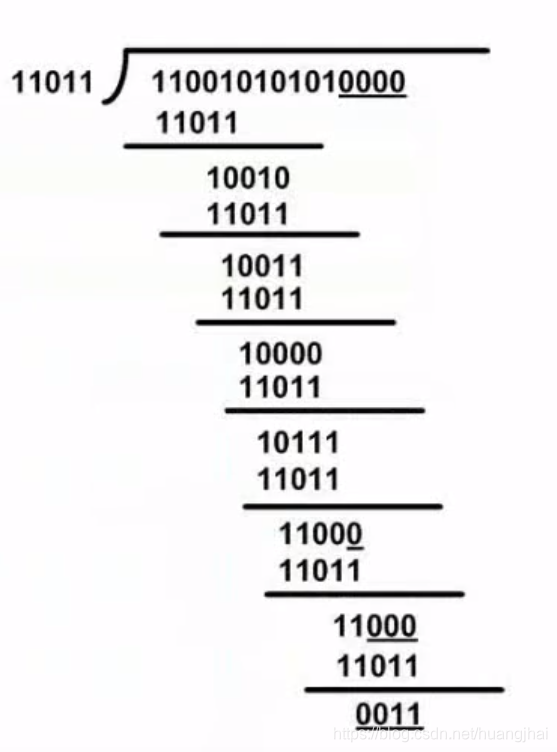
Módulo 2 divisão
O que é a divisão do módulo 2 e como ela é diferente da divisão comum?
O trigger do módulo 2 refere-se ao trigger que não conta o carry durante a operação de divisão.
(fazer operação XOR)
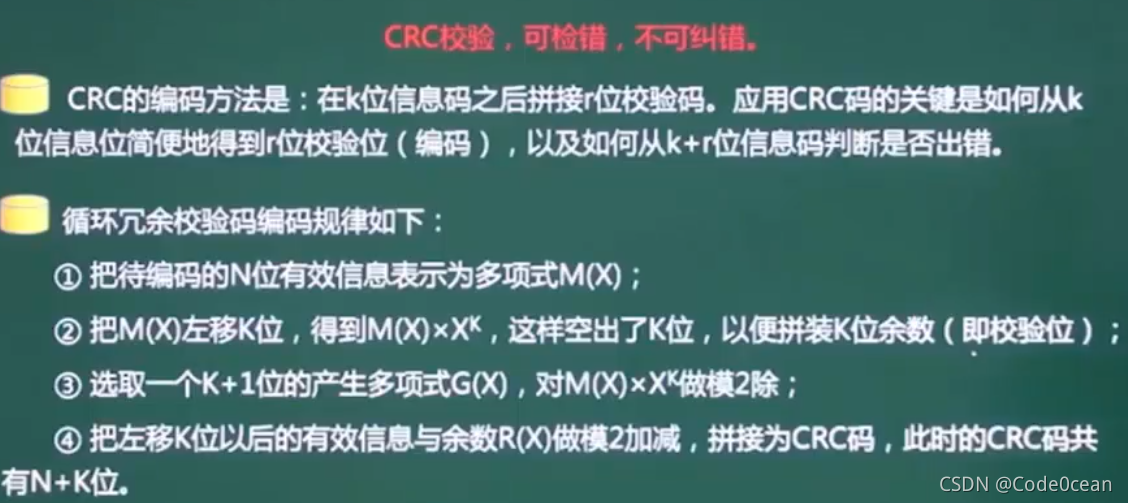
Código de Verificação Cíclica CRC
O código de verificação de redundância cíclica usa operação módulo 2,O código de verificação de redundância cíclica e a verificação de paridade só podem detectar, mas não corrigir erros

O código original correspondente ao polinômio é 11011, e o resultado do cálculo é:
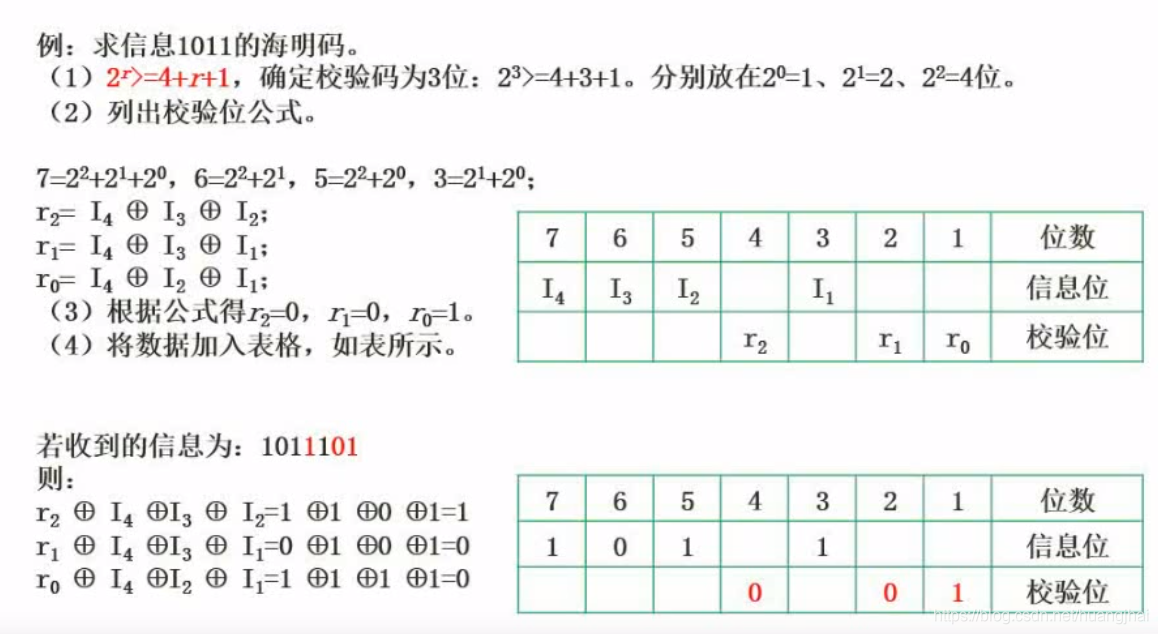
Código de verificação de Hamming
O código de Hamming é um método de verificação que usa paridade para detectar e corrigir erros, e a distância mínima do código é 2n+1. Os códigos de verificação de Hamming podem detectar e corrigir erros.
11. Sistemas Embarcados
Características dos sistemas embarcados:
- miniaturização
- Customizável
- tempo real
- confiabilidade
- Portabilidade
Em um sistema de microcomputador, o BIOS (Basic Input Output System) é armazenado emROM na placa-mãemeio. BIOS é um programa solidificado no chip ROM BIOS da placa-mãe, equivalente a um sistema operacional na parte inferior do hardware, que controla e salva a entrada e saída do hardware.
Notas resumidas de: