Para o método e as etapas de fazer ubuntu16.04 para instalar o disco U, consulte meu blog anterior:
https://blog.csdn.net/neptune4751/article/details/79146885
A instalação do sistema pode se referir a:
https://www.cnblogs.com/masbay/p/10745170.html
Adicione o tipo e tamanho de partição que o blogger não mencionou:
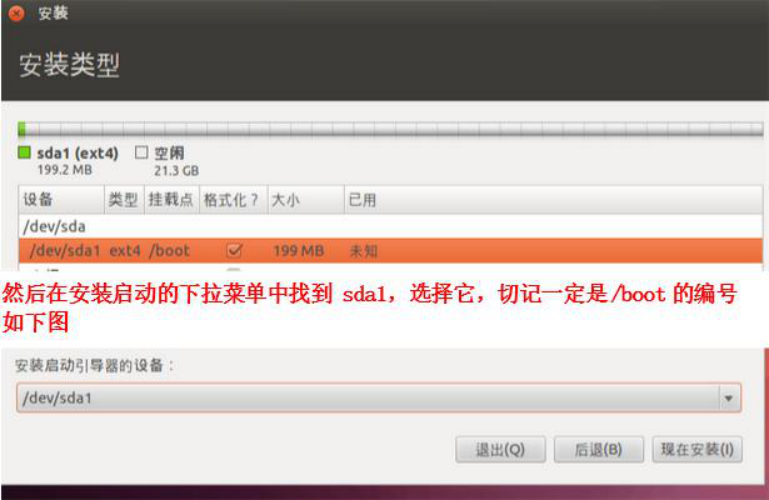
1./boot: partição primária, 200 MB de tamanho, formato: ext4
2. /: Tamanho da partição primária formato 80G: ext4
3. Troque o tamanho da partição lógica do espaço de troca 2 vezes o tamanho da memória, configurei 16G
4. O tamanho restante da partição lógica / home é alocado para ela. O formato é ext4 e o tamanho total é 120G
Além disso, o blogger usa Thinkstation, a primeira instalação sempre entra automaticamente no win10, não pode entrar no ubuntu, você precisa usar F12 para entrar na interface do bios. Depois que a instalação for bem-sucedida, você pode escolher entrar win10 ou ubuntu na interface principal. No momento do sucesso, o dispositivo carregador de boot instalado não foi selecionado no número / boot conforme mostrado na figura abaixo, e instalado de acordo com as opções padrão.
Em seguida, instale as bibliotecas necessárias para a operação do Visual SLAM, incluindo ROS, Eigen, Sophus, OpenCV3 + contrib, biblioteca de nuvem de pontos PCL, Pangolin, Octomap
1. A instalação do ROS pode referir-se ao meu blog anterior:
https://blog.csdn.net/neptune4751/article/details/103150788
É importante notar que: ao executar a instrução "sudo rosdep init", um erro é relatado: "não é possível baixar a lista de fontes padrão de:"
Acho que o github tem alguns limites de velocidade recentemente e o download de recursos é muito lento. A solução pode ser consultada em: https://blog.csdn.net/nanianwochengshui/article/details/105702188
2. Instalação própria:
A versão de instalação do blogger é Eigen3.3.7. Uma coisa a lembrar é que você precisa instalar o ceres mais tarde. Como a versão do Eigen será compilada ao compilar o ceres, a seqüência de instalação precisa instalar o Eigen3.3.7 primeiro e depois instalar o ceres1.14.0.
Se você usar " sudo apt-get install libeigen3-dev: a versão 3.2 de eigen está instalada , que não pode corresponder à versão de sophus e Ceres para serem instalados posteriormente
Método correto:
(1) Baixe o pacote de instalação no site oficial ( http://eigen.tuxfamily.org/index.php?title=Main_Page ): eigen-3.3.7.tar.bz2 e extraia-o aqui
(2) Digite Pasta eigen-3.3.7, clique com o botão direito para abri-la no terminal.
(3) Instale
1.mkdir build
2.cd build
3.cmake ..
4.sodu make installPorque recebo um erro quando executo o VINS-MONO mais tarde:

Finalmente ajuste a ordem de instalação: primeiro instale o Eigen3.3.7, depois instale o ceres, o problema está resolvido.
As etapas de instalação específicas do Eigen referem-se a:
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k
3. Instalação do Ceres, você pode consultar:
http://ceres-solver.org/installation.html
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k
4. Instalação do OpenCV3 + contrib
Haverá um erro durante a compilação: opencv_contrib está faltando boostdesc_bgm.i e outros arquivos
Mensagem de erro: ~ / opencv_contrib / modules / xfeatures2d / src / boostdesc.cpp: 673: 20: erro fatal: boostdesc_bgm.i: Nenhum diretório suchfileor
Neste momento, se você verificar o CMakeDownloadLog.txt na pasta de construção, descobrirá que boostdesc_bgm.i está faltando e faça o download no endereço designado.
boostdesc_bgm.i
boostdesc_bgm_bi.i
boostdesc_bgm_hd.i
boostdesc_lbgm.i
boostdesc_binboost_064.i
boostdesc_binboost_128.i
boostdesc_binboost_256.i
vgg_generated_120.i
vgg_generated
vgerated_g
.
Link da nuvem Baidu: https://pan.baidu.com/s/1BeYF8kqEZLAJYQj-MvxpmA
Código de extração: e1wc
Coloque-o no caminho opencv_contrib-3.3.1 / modules / xfeatures2d / src / e recompile;
5. A instalação da biblioteca de nuvem de pontos PCL, Pangolin, Octomap, pode consultar o link abaixo:
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k