Primeiro, introduza o exemplo de registro e calibração geométricos:
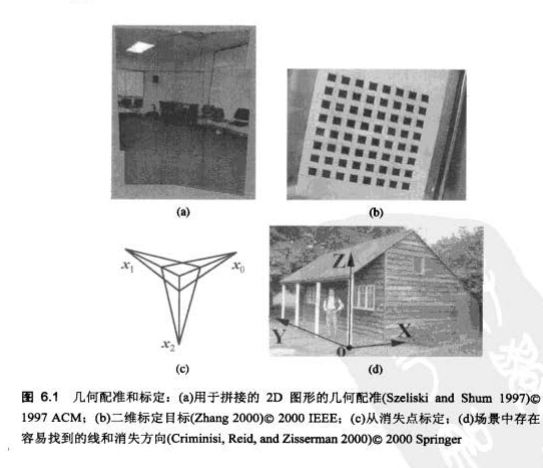
O registro baseado em recursos é o
problema de estimar o movimento de um conjunto de dois ou mais pontos 2D ou 3D correspondentes .
1. Use o mínimo de quadrados 20 de registro
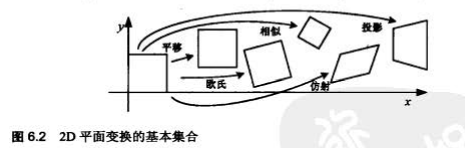
Dado um conjunto de pontos de recurso correspondentes \ ({X_i, x_ {i} ^ {'}}} e transformação de parâmetro plano da seguinte forma:
Para melhor estimar os parâmetros de movimento, o método comumente usado é o mínimo de quadrados, que é minimizar a soma dos resíduos ao quadrado.
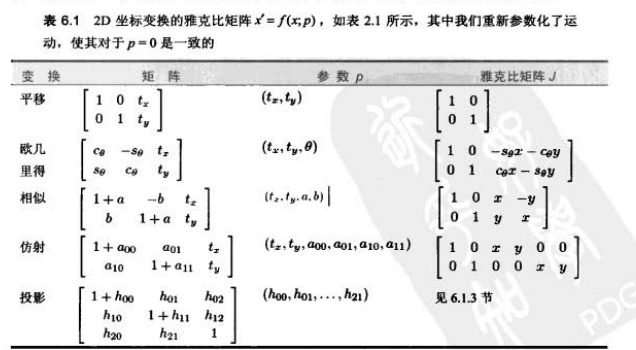
A matriz correspondente e a matriz jacobiana para diferentes transformações estão resumidas a seguir:
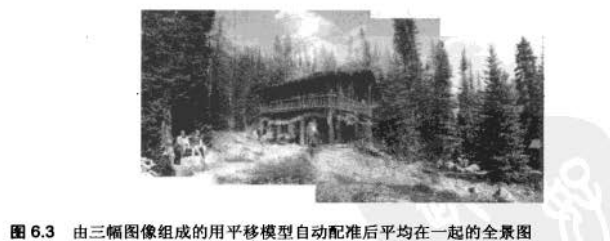
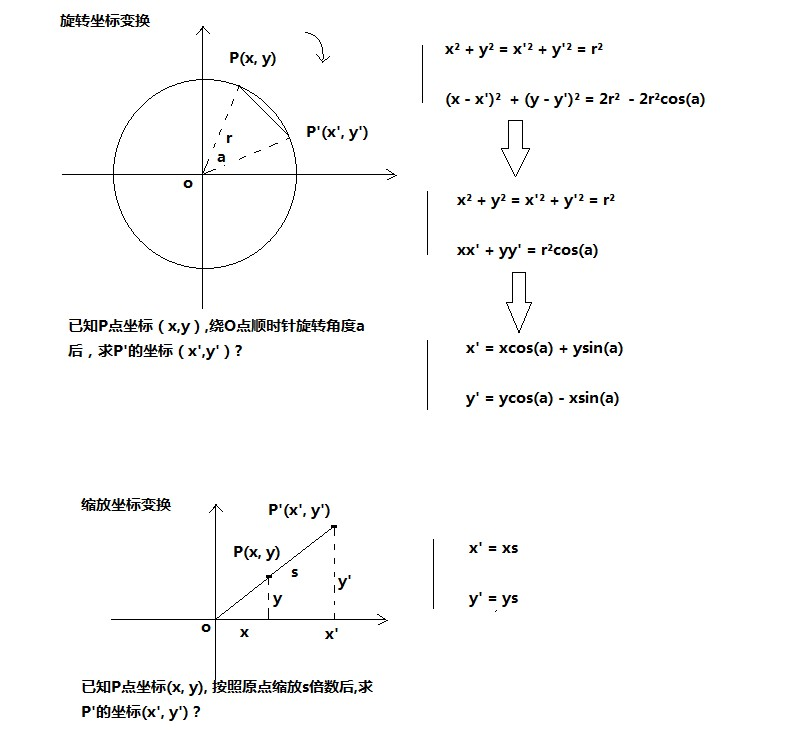
2. Aplicação: Panorama
Uma das aplicações mais simples de registro de imagem é uma forma especial de costura de imagem, chamada "panorama". No panorama, antes que a média simples seja usada para fusão, a imagem será traduzida e poderá haver rotação e redimensionamento.
Por exemplo, a seguinte figura:
Fórmula de transformação de rotação e escala:
Algoritmo iterativo três
Os mínimos quadrados lineares são o método mais simples de estimativa de parâmetros, mas a maioria dos problemas na visão computacional
não possui uma relação linear simples entre o valor medido e o valor desconhecido. O problema obtido neste caso é chamado de "mínimos quadrados não lineares" ou "regressão não linear".
4. Mínimos quadrados robustos e RANSAC
Os mínimos quadrados convencionais são uma escolha adequada para medições em que o ruído está em conformidade com uma distribuição normal (gaussiana). No entanto, quando existem discrepâncias nos pontos correspondentes, é necessário um mínimo de quadrados mais robusto. Nesse caso, Green usa *** M-estima ** (aplica uma função de penalidade robusta \ (p (r) \) aos resíduos em vez de seus quadrados.)
A estimativa M geralmente pode reduzir o impacto de valores discrepantes, mas em alguns casos, começar com muitos
discrepantes impedirá o IRLS (ou outros algoritmos de descida de gradiente) de convergir para o ideal global. Uma maneira melhor é encontrar um conjunto de pontos interiores que não correspondam, ou seja, pontos consistentes com a estimativa do movimento ativo. Existem dois métodos principais (ambos selecionam aleatoriamente um subconjunto de k pontos correspondentes, calculam o valor estimado de \ (p \) e calculam o resíduo do conjunto de pontos correspondente);
- Amostra aleatória de consenso
- Variação mediana mínima
Cinco, registro 3D
Diferentemente do registro de recursos de imagem 2D, muitos aplicativos de visão computacional exigem o registro de pontos 3D.No caso em que a transformação 3D é linear aos parâmetros de movimento, por exemplo, tradução, semelhança e transformação afim, os mínimos quadrados convencionais podem ser usados.
Para o caso do esporte europeu, chamado de "direção absoluta", são necessários os dois métodos a seguir:
- Algoritmo Ortogonal de Procrustes : Calculando a decomposição de valor singular (SVD) da matriz de correlação 3 × 3, a matriz de rotação é obtida.
- Algoritmo de direção absoluta : estimar o quatérion unitário correspondente à matriz de rotação \ (R \) e encontrar o vetor próprio com o maior valor próprio positivo.
As experiências compararam os outros dois métodos para provar que a diferença de precisão entre os dois métodos é insignificante.