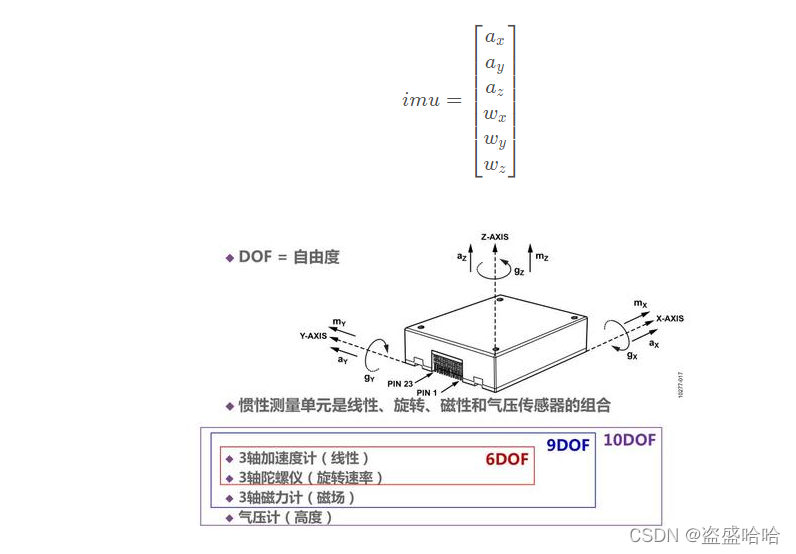
1.IMU 소개
관성 측정 장치(Inertial Measurement Unit)는 보통 가속도계 3개와 자이로스코프 3개로 구성되며, 가속도계와 자이로스코프는 서로 수직인 측정축에 설치되며, 여기서 출력은 3가지로 볼 수 있다. 다음과 같이 표현되는 방향:
2. GPS(RTK) 소개 GPS
(Global Positioning System)는 모든 사람에게 친숙해야 합니다 출력은 일반적으로 경도, 위도 및 고도이며 일부는 North East Sky[VN;VE; VU].다음과 같이 표현됩니다.

두 개의 통합 전략 (두 개의 독립적인 시스템은 느슨한 결합을 사용함):::
느슨한 조합
느슨한 조합은 GPS 수신기가 내비게이션 필터를 사용하여 의사 거리 및 반송파 위상 관측을 독립적인 위치 및 속도 탐색 솔루션으로 처리하고 GPS 위치 및 속도 데이터를 Kalman 필터에 직접 관측값으로 입력하는 것을 의미합니다. , 관성 항법에 대한 항법 보정을 수행합니다. GPS와 관성 항법은 두 개의 독립적인 위치 및 자세 매개변수 세트로 통합 항법 프레임워크에 입력되며 통합 항법 프레임워크와 GPS 및 관성 항법 사이에 피드백 루프가 있으며 최종적으로 생성됩니다. 통합된 단일 내비게이션 솔루션입니다.
그 특징은 다음과 같습니다: GPS 관측 값을 사용하여 시스템에서 내비게이션 솔루션 출력을 수정하고, 관성 내비게이션 오류 상태 피드백을 사용하여 다음 시대의 관성 내비게이션 솔루션을 수정합니다.
GPS 수신기의 위치 및 속도 관측에서 계산된 결합된 포지셔닝 결과에는 일부 제한이 적용됩니다. GPS 솔루션이 중단되더라도 시스템은 결합된 GPS/IMU 결과(역 스무딩 알고리즘)를 계속 생성할 수 있지만 GPS 솔루션이 다시 수렴될 때까지 위치 정확도는 시간이 지남에 따라 저하됩니다. 만약 GPS 수신기가 3개의 위성만 수신하지만 차동 모드에서 최소 4개의 위성이 필요한 경우 GPS 수신기는 항법 해를 계산할 수 없으며 GPS 보조 관성항법의 칼만 필터로 수신한 데이터는 GOS 수신기 보조 데이터: 수신기가 위성을 추적하는지 여부에 관계없이 의사 거리 및 반송파 위상 관측도 출력합니다.
1: 상태 추정 공간은 IMU의 평균값을 사용하여 위치를 계산합니다.
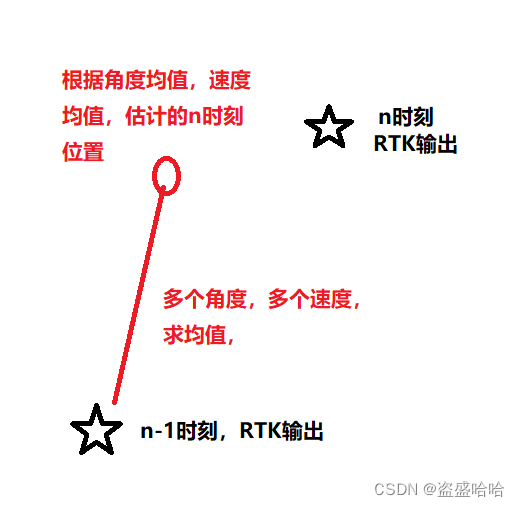
2: RTK 데이터를 세그먼트로 계산합니다.
