P3ATにROS環境を使用します
序文
- ワークを加算する前に、およびラジカル改善レーザと接続の問題を解決します
P3ATにROS環境を使用して
はじめの
参照
学習記録
構築するためにROS環境
ROSARIA-2.9.1バージョンの
基本
使用ROSARIA
レーザー問題
熟達会社公式設定ファイル
UbuntuのSICKの設定を
レーザーのみを使用して
の使用にROSパッケージを
はじめの
参照
学習記録
構築するためにROS環境
ROSARIA-2.9.1バージョンの
基本
使用ROSARIA
レーザー問題
熟達会社公式設定ファイル
UbuntuのSICKの設定を
レーザーのみを使用して
の使用にROSパッケージを
参照
ウィキRosaria
ARIA ARNLロボットとパラメータ
ARIAレーザーに接続する方法
Linuxの起動時にAプログラムの実行
Ubuntu Linuxのネットワーク構成の
LinuxのC ++コンパイラ
レーザー距離計の
SICK LMS100 / LMS-111 / LMS-500レーザーは距離計
Ubuntuのネットワーク構成
LMS100 ROSのネットワーク接続を
ROSネットワーク接続LMS5xx
学習の記録
ROS環境を構築します
deb http://ros.exbot.net/rospackage/ros/ubuntu/ trusty main
ROSARIA
ROS for indigo
to search available packages
apt-cache search ros-indigo
最初只安装一个版本,便把环境变量加进去了
Note that catkin_init_workspace must be run inside the src subdirectory, but catkin_make is used in the parent workspace directory. catkin_init_workspace only needs to be done once in the src directory.
Every time you want to use the catkin workspace to build packages, you must source the special devel/setup.bashscript:
cd catkin_ws
. devel/setup.bash
You must do this for every new shell or terminal window you open.
If you only use one catkin workspace, you can add this command to your .bashrc file, so that it automatically occurs for every new shell or terminal window you run.
For example, if your catkin workspace is catkin_ws in your home directory, edit .bashrc in your home directory and add the following line to the end of the file. The .bashrc file is normally hidden, but you can still reference it to edit it or enable "Show hidden files" in the file browser preferences.
. ~/catkin_ws/devel/setup.bash
If you have multiple catkin workspaces for multiple versions of ROS, you must source the setup file from inside the workspace you want to use.
ARIA for linux
安装ROSARIA后别装单独装ARIA了,会有版本冲突
libaria2.9.deb无法安装,因为电脑中已经有2.8版本,可能是RODARIA的依赖包
kinetic 版本,需要在安装目录重新编译以解决问题。
ros-arnl 安装(还未装)
先安装arnlbase, arnl包>=1.9.2
编译
安装mobilesim,Mapper,MobileEyesROSARIA-2.9.1バージョン
sudo dpkg -i libaria*
tar -zxvf Mapper3-2.2.5.tgz
sudo mv Mapper3-2.2.5 /usr/local/
tar xzf MobileSim-src-0.7.5.tar.gz
export ARIA=/usr/local/Aria
cd ./MobileSim-src-0.7.5
make -j4
sudo make install基本
- これは、ファイルのディレクトリに、シリアルポート、ネットワークアドレスと他の接続パラメータ、接続パラメータおよび他のセンサ、./param/ ARIAこれらのファイルを含み、特別なプロファイルを持っています
- サンプル開始
cd /usr/local/Aria/examples
./demoROSARIA使用
レーザーの問題
- 特に注目すべきは、次のとおりです。デフォルトゲートウェイはどこ自分のコンピュータでのネットワークセグメントのIPアドレスでなければならず、他のセグメントのIPアドレスを記入することはできません。
- SICKは、ケースを開くために正しい方法で、2つの方法があります
- LMS511は、自動的にIP(すなわちDHCP)を得るために設定され、デバイスは、ルーティング装置がレーダに動的アドレスを割り当てるように、(ルータなど)ルータ機能の背後に接続され、自動的にソフトウェアSOPASを実行するコンピュータを使用してWindowsを検索された場合デバイスは、あなたが接続できます。
- あなたは、ルータを持っていない場合は、上のコンピュータに直接LMS511のネットワークケーブルをすることができ、IPおよびLMS511同じネットワークセグメントにコンピュータのIP限りは、静的IP LMS511を設定する必要があります。そして、あなたは自動的に検索またはsicktoolboxのSOPASは窓の下で運転してのUbuntuでのレーダデータの下に取得することができることができます。
熟達会社公式設定ファイル
Ubuntuの設定SICKの下で
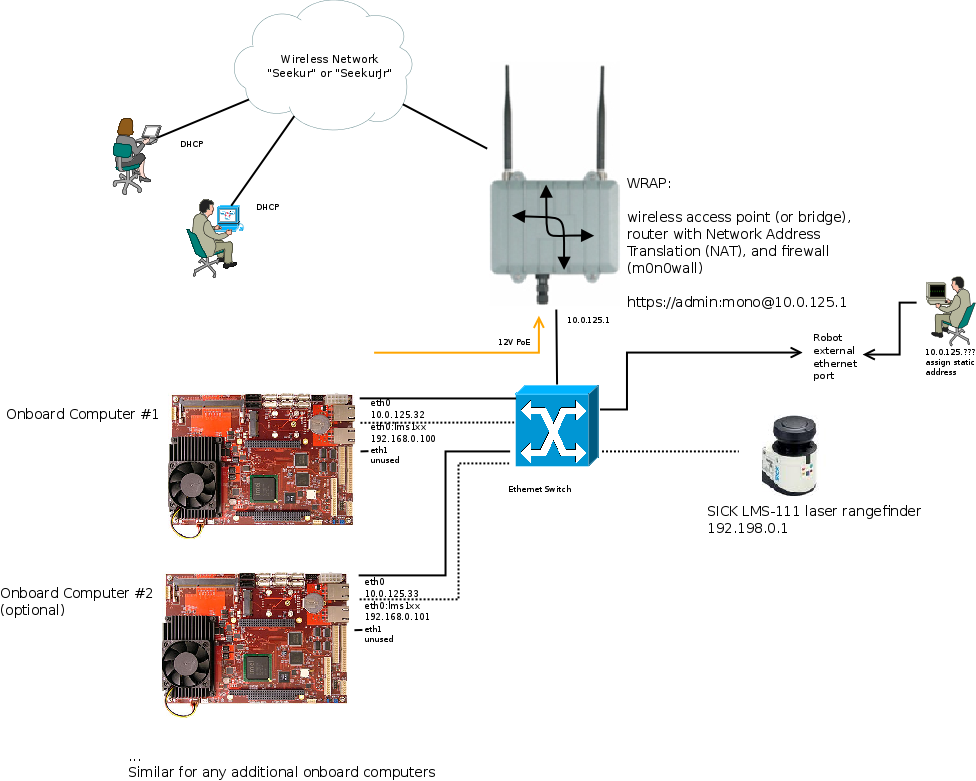
- ブリッジを介して外側のネットワークに接続されたレーザのスイッチを介して接続されたコンピュータ、(アクセスポイント、ZTE WAPのように廊下)車載
- Ubuntuでは、ネットワークインタフェースの設定は、ネットワークマネージャを介して行われます。GUIインターフェイスを使用して設定を変更するには、デスクトップのステータスバーにネットワークステータスアイコンをクリックして、「編集接続」を選択します。「有線接続2」または「Secondaryイーサネット接続」または「内部イーサネット接続」を選択します。メインのIPアドレスに加えて、マスク192.168.255.255とゲートウェイ192.168.0.1で、192.168.0.4にIPアドレスを設定します。
レーザ単独を使用して
- それでも唯一のイーサネット接続を導入ここでは、イーサネットを使用することができますし、シリアルポートは、Ubuntuの中で、レーザーを接続するには2つの方法があります
- 以太网连接方式接线还是和Windows下一样,依然要手动设定电脑的IP,使电脑和激光在同一网段。
在Ubuntu下“编辑连接”——“以太网”——“添加”创建一个名为lms511的有线连接,手动设定子网掩码为255.255.255.0,手动设定IP为192.168.0.10(192.168.0.2~192.168.0.254都行),这样此IP与LMS5xx设备IP就处于同一网段了 - 这时用sicktoolbox2就可以读取激光的数据了
使用ROS包
<launch>
<arg name="urdf" default="$(find amr_robots_description)/urdf/pioneer3at.urdf" />
<param name="robot_description" textfile="$(arg urdf)" />
<node pkg = "rosaria" type = "RosAria" name = "RosAria">
<param name="port" value="/dev/ttyUSB0" type="string"/>
<param name="publish_aria_lasers" value="true"/>
<param name="zsstart_pose_x" value="0.0"/>
<param name="zsstart_pose_y" value="0.0"/>
<param name="zsstart_pose_th" value="0.0"/>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
</launch>