エアクッションサスペンション車両(問I)【高等専門学校群】
1. タスク
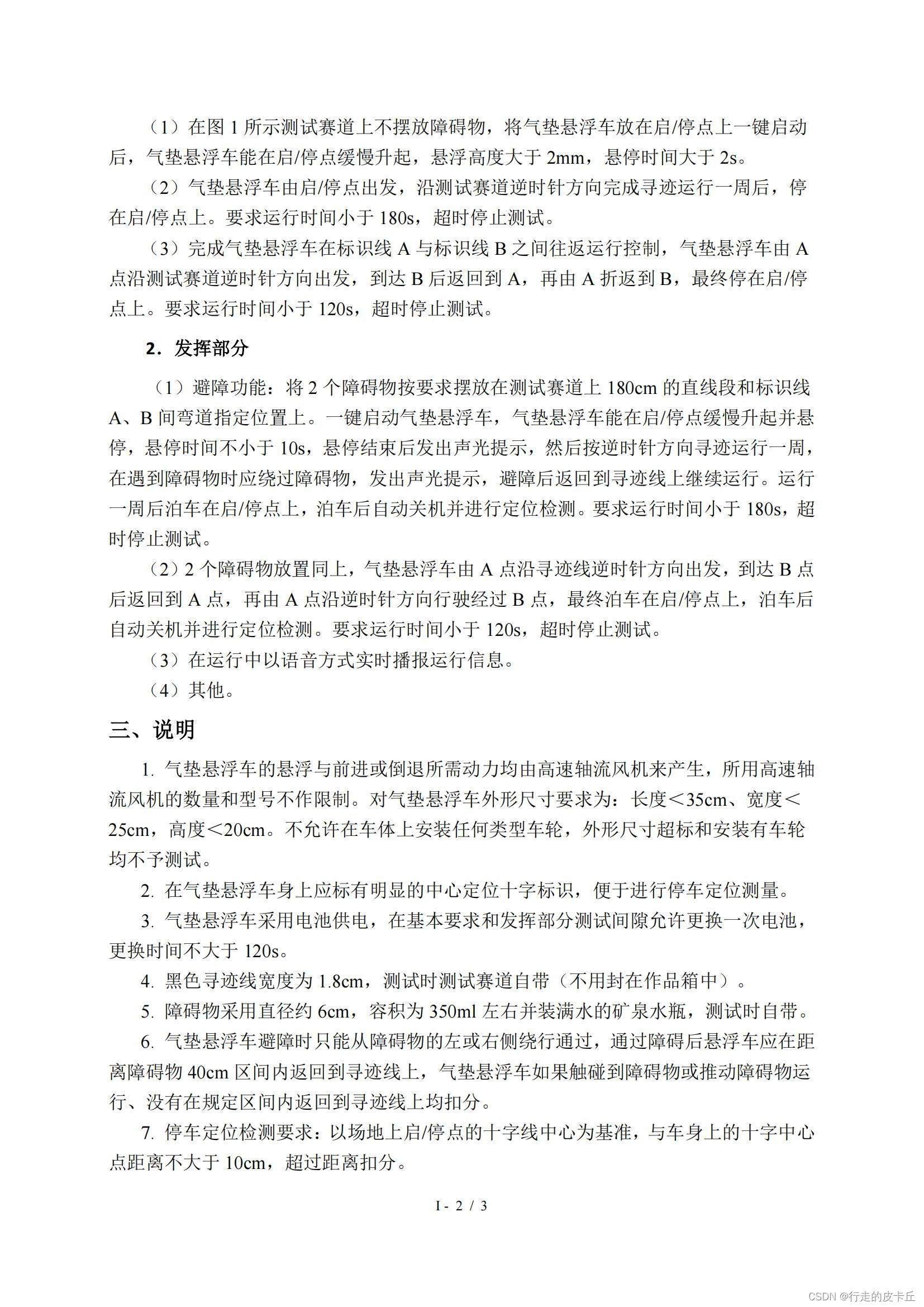
高速軸流ファンによって駆動されるエアクッション サスペンション車両を設計および構築します。サスペンション車両のテストトラックを図 1 に示します。

2. 要件
1. 基本部分
- (1) 図 1 のテストコース上には障害物がなく、エアクッションサスペンションカーをスタート/ストップポイントに置き、ワンクリックでスタートします。エアクッションサスペンションカーはスタート/ストップ時にゆっくりと上昇します。サスペンションの高さが 2mm を超えるポイントでは、ホバリング時間が 2 秒を超えます。
- (2)エアクッションサスペンション車両は、発停点から発進し、試験線路に沿って反時計回りに1週間の追従動作を完了し、発停点で停止する。実行時間は 180 秒未満である必要があり、テストはタイムアウト後に停止します。
- (3) 標線Aと標線Bの間を往復走行するエアクッションサスペンション車両の制御が完了します。エアクッションサスペンション車両は、A地点から試験路の反時計回り方向にスタートし、Bに到達し、 Aに戻り、AからBに戻り、最後にスタート/ストップポイントで停止します。実行時間は 120 秒未満である必要があり、テストはタイムアウト後に停止します。
2. 遊びの部分
- (1)障害物回避機能:テストコース上の180cm直線区間および区画線AとBの間のカーブの指定位置に、必要に応じて2つの障害物を設置します。ワンクリックでエアクッションサスペンションカーを始動します エアクッションサスペンションカーはゆっくりと上昇し、開始/停止点でホバリングできます ホバリング時間は10秒以上です ホバリング完了後、警報音が鳴ります障害物に遭遇すると、障害物を回避し、音と光で警告し、障害物を回避した後、追跡ラインに戻り、走行を続けます。1週間の走行後、スタート/ストップポイントに駐車し、駐車後は自動的にシャットダウンして位置検出を行います。実行時間は 180 秒未満である必要があり、テストはタイムアウト後に停止します。
- (2) 上記のように 2 つの障害物を配置し、エアクッションサスペンション車は A 点から追従線に沿って反時計回りにスタートし、B 点に到達して A 点に戻り、A 点から反時計回りに走行して点を通過します。 B、最後に駐車、開始/停止地点では駐車後に自動的にシャットダウンし、位置検出を行います。実行時間は 120 秒未満である必要があり、テストはタイムアウト後に停止します。
- (3) 運転中は音声による運行情報をリアルタイムに放送。
- (4) その他。
3. 説明
-
- エアクッションサスペンション車両のサスペンションや前後進に必要な動力は高速軸流ファンで発生しますが、高速軸流ファンの数や機種は限定されません。エアクッションサスペンション車両の寸法は、長さ <35cm、幅 <25cm、高さ <20cm です。いかなる種類のホイールも車体に装着することは認められず、外形寸法が規格を超えている場合やホイールを装着した場合は試験が実施されない。
-
- エアクッションサスペンション本体には、駐車位置測定を容易にするために、明確な中央位置決め十字マークを付ける必要があります。
-
- エアクッションサスペンション車はバッテリーを駆動しており、バッテリーの交換は基本要件と性能試験の間に1回のみ許可されており、交換時間は120秒以内です。
-
- 黒いトレースラインの幅は1.8cmで、テスト時にテストトラックが付属します(作業ボックスに封入する必要はありません)。
-
- 障害物は試験時に持参する直径約6センチ、容量約350ミリリットルの水を入れたミネラルウォーターのボトル。
-
- 障害物を回避する場合、エアクッションサスペンション車両は障害物の左側または右側のみを迂回することができ、障害物を通過した後、ホバービークルは障害物から40cm以内の追跡線に戻る必要があります。障害物に触れたり、障害物を押したり、指定された間隔内に追跡ラインに戻らなかったりすると減点されます。
-
- 駐車位置検出要件:フィールド上のスタート・ストップ地点の十字線の中心を基準とし、車体上の十字線の中心点からの距離が10cm以内であること。距離が距離を超える。
-
- エアクッションサスペンション車両は、ホバリング時間、サイクル操作、回避すべき障害物の数、安定駐車などの運行情報を音声モジュールでブロードキャストする必要があります。
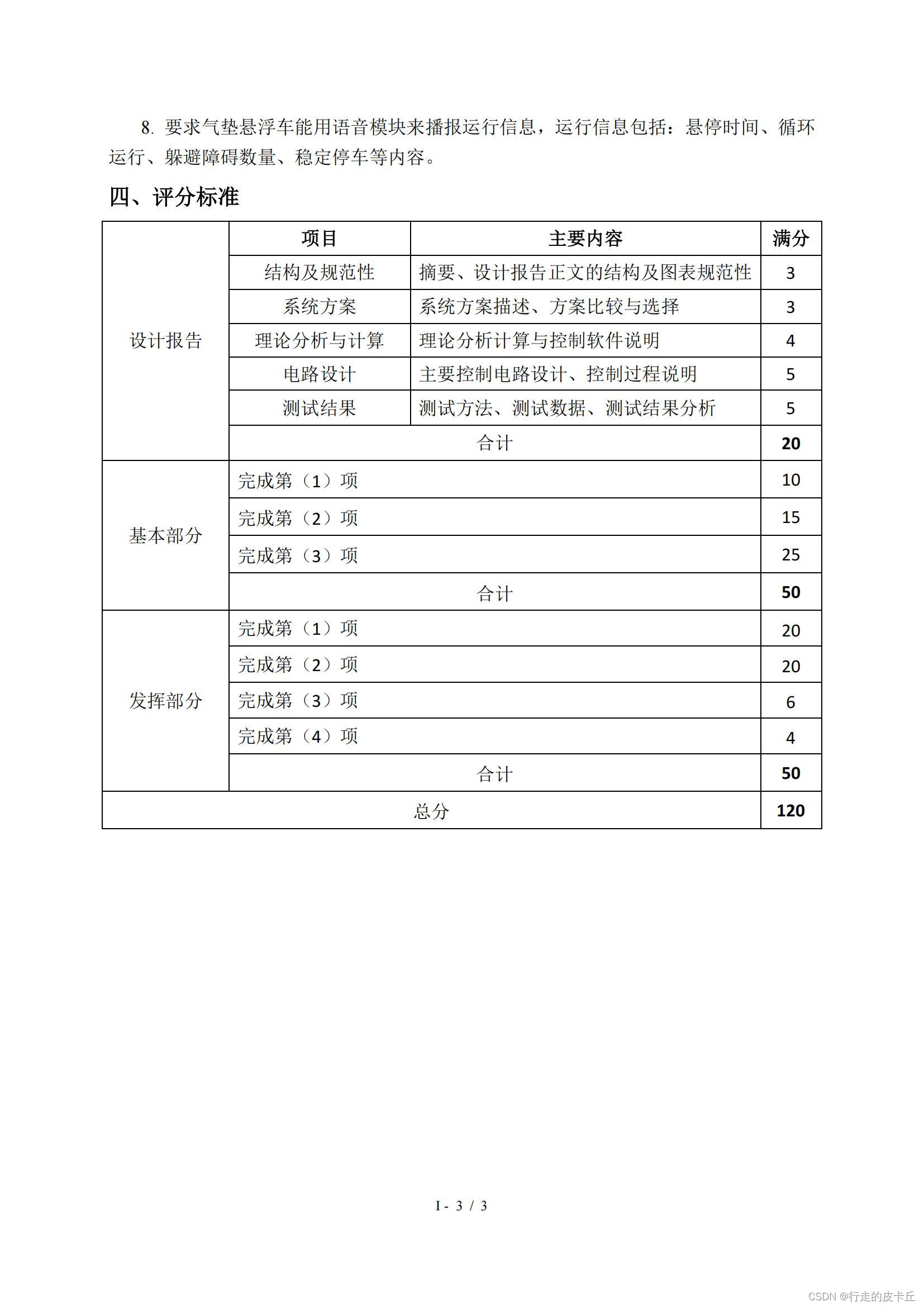
4. 採点基準

優れた作品のオープンソース リファレンス (出典: Lichuang Open Source Platform)
- 嘉里荘: https://lceda.cn/
- LiChuang オープンソース プラットフォーム: https://oshwhub.com/
- 【2023年電子コンペティション】2023年全国大学生電子デザインコンペティション