STM32F103ZET6シリアル通信
記事のディレクトリ
序文
STM32の学習は3つのバージョンに分けることができます。
1.登録バージョン
2.ライブラリ関数バージョン
3.HALライブラリバージョン
個人的な理由により、STM32を学習するためにライブラリ関数バージョンを選択します。
ヒント:ソフトウェアのインストールなどの問題は説明されません!!!
一、串口通信
1はじめに


2.関連パラメータ

3.回路図

2.シリアルポート構成の一般的な手順

3つの関連するソースコード
1.uart_init関数
コードは次のように表示されます。
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
2.USART1_IRQHandler関数
コードは次のように表示されます。
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}

3.main.c関数
コードは次のように表示されます。
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "beep.h"
#include "key.h"
#include "usart.h"
#define LED1 PBout(5)
#define LED2 PEout(5)
#define Beep PBout(8)
int main(void)
{
u16 t;
u16 len;
u16 times=0;
//u8 key;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init();
LED_Init();
Beep_Init();
KEY_Init();
uart_init(115200);
while(1)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
printf("\r\n您发送的消息为:\r\n\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART1, USART_RX_BUF[t]);//向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
printf("\r\n\r\n");//插入换行
USART_RX_STA=0;
}else
{
times++;
if(times%5000==0)
{
printf("\r\n精英STM32开发板 串口实验\r\n");
printf("正点原子@ALIENTEK\r\n\r\n");
}
if(times%200==0)printf("请输入数据,以回车键结束\n");
if(times%30==0)LED1=!LED1;//闪烁LED,提示系统正在运行.
delay_ms(10);
}
}
}
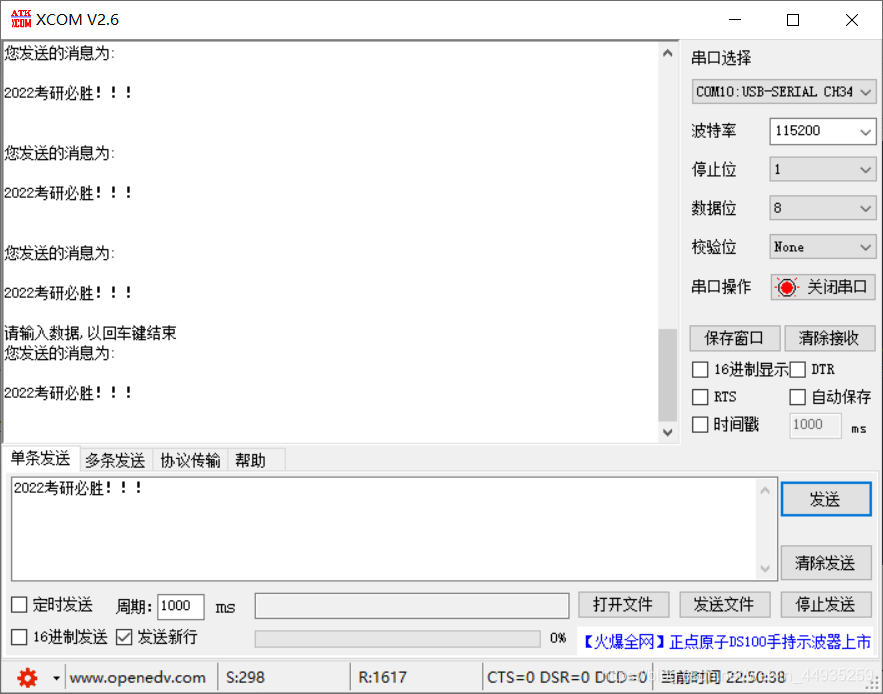
4.実験結果
総括する
ソースコードと関連する関数入力パラメータの意味を皆さんが注意深く理解できることを願っています!!!
この部分にはたくさんのコンテンツが含まれていますので、少し時間を取って理解していただければ幸いです。