社会的な力モデル(ソーシャルフォースモデル、SFM)
1998年、「歩行者ダイナミクスのための社会的な力モデル」に掲載されたダーク・ヘルビングの理論モデルは、提案しました。本論文では、この論文をHelbingの理論モデルの除去は、解釈を詳細に説明しました。
三つのに必要な力:
(ターゲットの方向に作用する力)目標速度1.所望の加速
仮定する歩行者のニーズを可能な限り目標位置に到達するために
、ターゲットへの歩行者通路は、一般にポリゴンの進歩に沿ってエッジとして抽象化することができます
、...、
:=
。歩行者でいるものとする
、目標方向が式に従って計算することができます
。
ここでは歩行者がスピードを希望しました:
私たちは、この力派生式に来ることができます。
エンティティ間の反発力を維持する2.(常にエンティティとエンティティとの間の一定の距離を保ちます)
ここで、各歩行者のプライバシーの範囲は、局所作用として解釈することができます。エンティティが近すぎる場合、それは効果が反発、それはベクトルで表すことができるβ他の歩行者が発生します。
我々は、斥力ポテンシャルを仮定等、Bの減少単調関数である移動点の方向に楕円形等電位線です。その理由は、他の歩行者は、アカウントにスペースの次の動きの必要性を取るということです。Bは楕円の半短軸を表します。
ここで、
歩行者がβ段階のステップサイズを。
また、歩行者はまだ建物、壁、通り、および他の障害物の境界から一定の距離を保ちます。彼らは歩行者に注意を払うだろうので、より多くの歩行者が怪我のリスクを減らす、彼は近い国境に歩いて、より不快感を感じることが、例えば、壁に実行しないように注意してください。したがって、一種類反発効果を引き起こす境界Bは、この力は、以下のように表すことができます。
3.魅力(おそらくエンティティ間で、それは周囲の環境とのエンティティの間であってもよいです)
位置にモデル化で魅力
:
利息の減少に起因して、魅力は通常、時間tにわたって減少しています。しかし、引力と斥力効果のみの動きの所望の方向に適用されるため、上記式
で知覚の場合。歩行者は、C(0 <C <1)にはほとんど影響の背後に配置されます。このような認識の効果を説明するために(すなわち、ビュー2の有効角度
)、我々は正しい方向依存重みを導入する必要があります。
要約すると、歩行者の行動と誘致力の除外は、次のとおりです。
これで、歩行者の総電力を得ることができます:
この社会的な力モデルが出て導出されています。
変数である変動ランダムな変動。一の態様では、これらの変動は、二つまたはぼかし同様の複数の代替動作(同じ右または障害の左側によって例えばユーティリティ)に由来します。異常な運動の法則からの一方、偶発的または意図的な変動歩行者。
そして、歩行者の最大速度の有無を検討し、その推定本物の運動モデルは、次のとおりです。
その中でも、
群衆の中にSFMのアプリケーション異常検知
以下は、2009年に発表されたラミンMehranら、論文「ソーシャルフォースモデルを使用して異常な群集行動検出」からの抜粋です

ここで、単に方法挙げ記事の話:グリッド像点に重ね、及び時間次元に基づいてオプティカルフローの平均値を算出する第一と。次に、画素オプティカルフロー追跡運動に基づいて、モデルへの社会的力モデルとここで、それらの間の相互作用力を計算する(ここでもパニック因子Helbingの導入に基づいて、社会的力モデルを改善2000年に作られました)。次いで、ランダムに通常の移動パターンをモデル化するために力の流れに複数の領域を選択します。最後に、正常または異常な分類の単語の方法のバッグ。

画像ショー集団の使用は、フローチャートためSFM異常検出方法を行います。

正常および異常紙試験結果を用いて、上記の方法は、正しく分類されています。
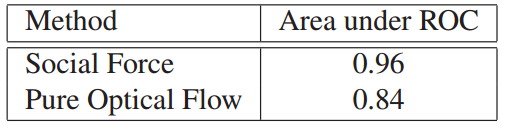
異常検出UMNデータセットROC面積、コントラスト純粋なオプティカルフロー、上の図は、より良好な社会力モデルを実行します。

ネットワークデータセット上のROC計算結果は、依然として、オプティカルフローと比較して多くの利点をその社会的力モデルを示します。
時間効果で2009年に提案された方法は、非常に良いです。社会的な力モデルのアプリケーションは、まだ多くの研究者が社会的な力モデルを含め、群衆の異常検出領域の後ろに徹底した調査を行うことを続けている2012 Y Zhangらの知覚属性導入しながら、(属性を意識した)は、異常検出観衆を作ったに基づきます社会的混乱や統計的特性を使用して混雑した属性プロパティは、社会的行動の本当の状況を説明します。セマンティックな特性によって強化知覚は社会的勢力のモデルに基づいて改善されています。この方法は、他のいくつかの方法の利点を持っています。
参考資料
1. Helbing D、モルナーP。歩行者ダイナミクスのための社会フォースモデル[J]。フィジカルレビューE統計物理学プラズマの流体&関連学際トピックス、1998、51(5):4282。
2. Helbing D、FarkasのIJ、Vicsek T。シミュレーション力学は、エスケープ・パニック[J]の特長。社会レンス電子出版、2000、407(6803):487から90。
3. Mehran R、大山A、シャーM。社会的な力モデルを使用して異常な群集挙動検出コンピュータビジョンとパターン認識(CVPR 2009)、20-25 2009年6月の[C] // 2009 IEEEコンピュータ学会大会、マイアミ、フロリダ、USA。IEEE、2009。
4.張Y、秦L、ヤオH、ら。社会的属性を意識した力モデルに基づく異常な群集行動検出画像処理上の[C] // IEEE国際会議。IEEE、2012。
