Annuaire d'articles
25.1.3 Inspection du capteur de télémétrie
25.1.4 Vérification avant déverrouillage
25.1.7 Paramètres de fonctionnement normaux
25.1.8 Exemple vidéo (Copter-3.4)
25.1.1 Test du capteur
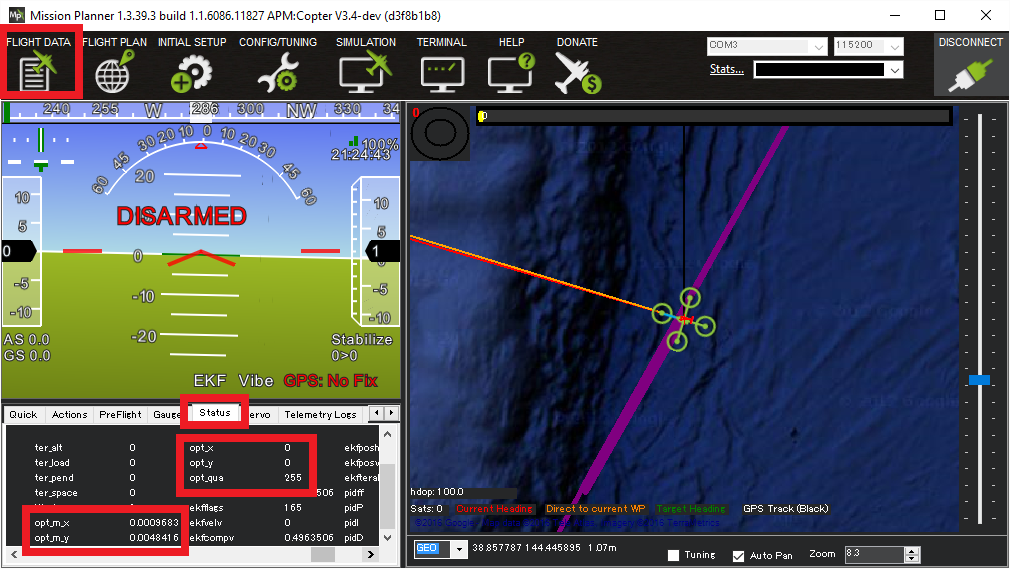
Après avoir connecté les capteurs au pilote automatique , utilisez Mission Planner pour vous connecter au pilote automatique et ouvrez l' onglet Statut de l'écran Données de vol . Si le capteur est en cours d'exécution, vous verrez que les valeurs opt_m_x , opt_m_y et opt_qua sont toutes différentes de zéro.
25.1.2 Calibrage du capteur
1. Connectez le pilote automatique etréglez LOG_DISARMED sur 1 pour garantir que la fonction d'enregistrement lorsqu'elle est verrouillée est activée.
2. Trouvez un endroit avec une surface texturée et beaucoup de lumière (lumière naturelle ou fort éclairage incandescent).
3. Retirez l'hélice (la sécurité avant tout).
4. Mettez l'avion sous tension et placez le niveau loin de votre corps et de vos yeux.
5. En une seconde environ, l'avion effectue une rotation de -15 à +15 degrés autour de l'axe de roulis et inversement. Répétez 5 à 10 fois. Lors de la rotation, le centre du capteur et l'arrière-plan restent immobiles en fermant un œil.
6. Répétez autour de l’axe de tangage de l’avion.
7. Téléchargez le journal flash de données et tracez les données OF.flowX , OF.bodyX et IMU.GyrX . Ça devrait être comme ça.
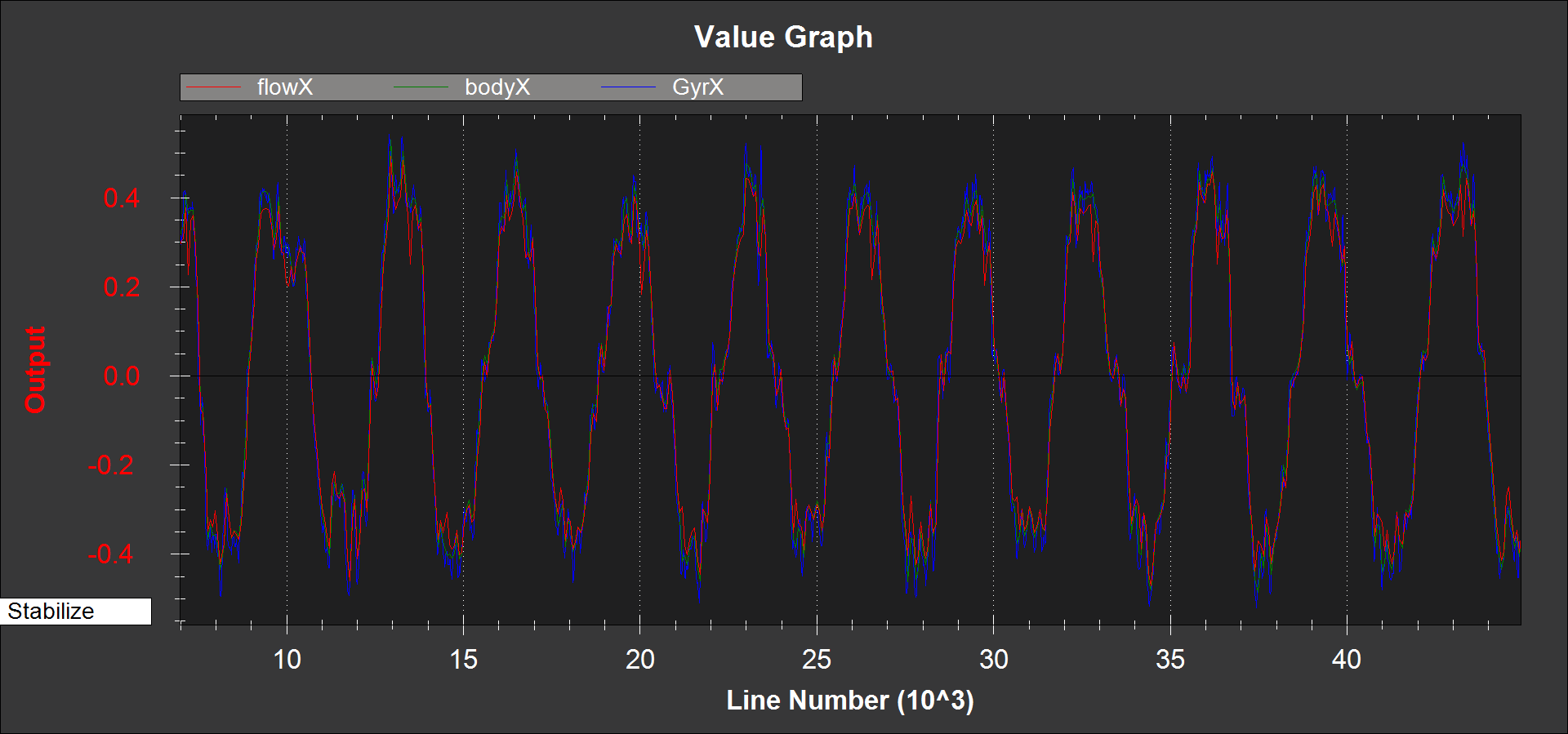
8. Si OF.flowX est plus grand ou plus petit que OF.bodyX , vous pouvezl'ajuster en modifiant le paramètre FLOW_FXSCALER .
9. Si OF.bodyX n'est pas lié à IMU.GyrX ou a des signes opposés, il se peut queparamètre FLOW_ORIENT_YAW soit mal défini ou que le capteur de débit ne soit pas orienté vers le bas.
10. Tracez les données OF.flowY , OF.bodyYband et IMU.GyrY . Ça devrait être comme ça.
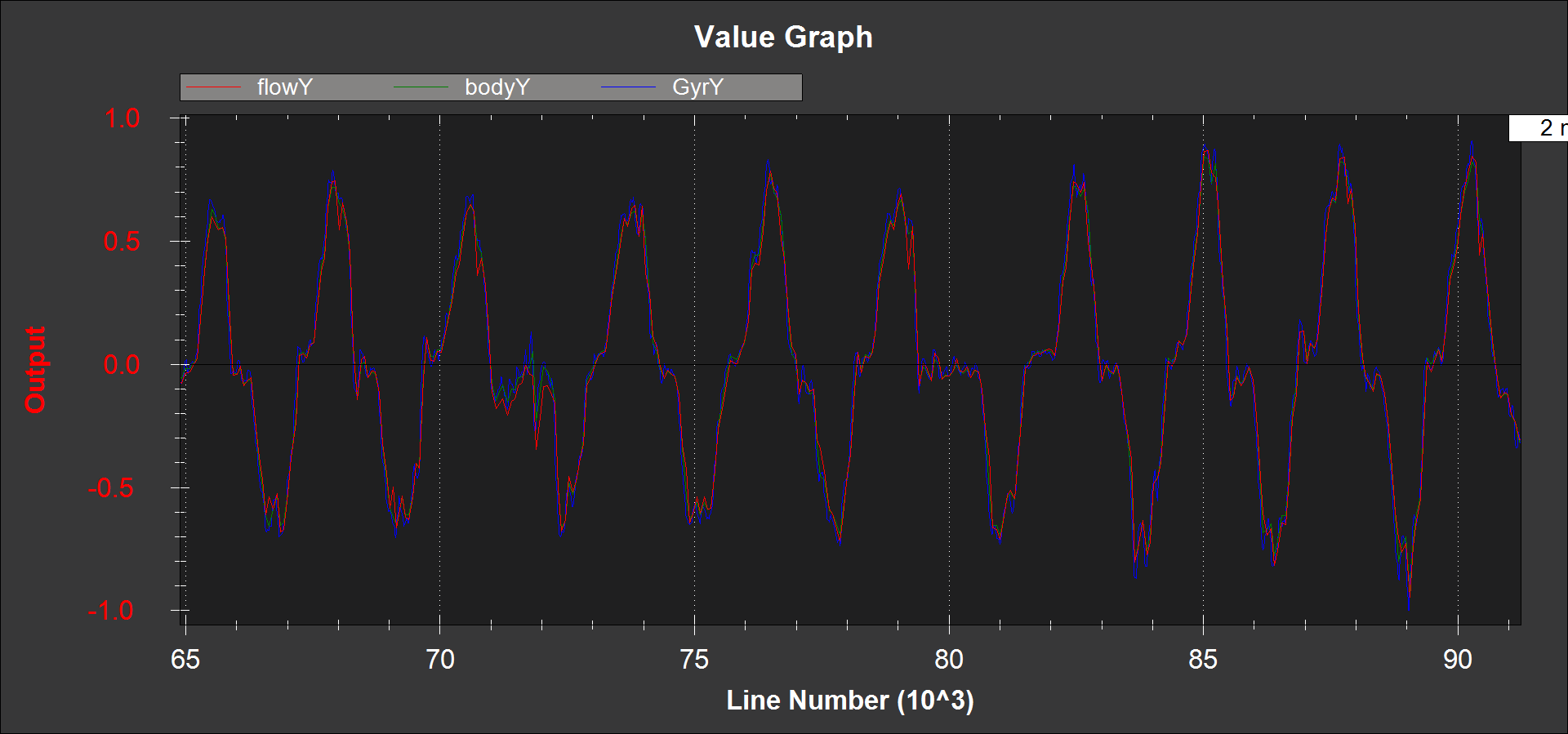
11. Si OF.flowY est plus grand ou plus petit que OF.bodyY , il peutêtre ajusté en modifiant le paramètre FLOW_FYSCALER .
12. Si OF.bodyY n'est pas lié à IMU.GyrY ou a des signes opposés, le paramètre FLOW_ORIENT_YAW peut être mal défini ou le capteur de débit n'est pas orienté vers le bas.
25.1.3 Inspection du capteur de télémétrie
Consultez le journal flash du test d'étalonnage du capteur de débit pour obtenir des informations sur EKF5.meaRng . Vérifiez les éléments suivants :
1. Peut effectuer une mesure de plage continue.
2. La distance qu'il affiche au sol est de 10 cm de la valeur attendue (rappelez-vous que lorsque le véhicule roule ou tangue, la distance mesurée augmentera car le laser est mesuré sur une pente).
25.1.4 Vérification avant déverrouillage
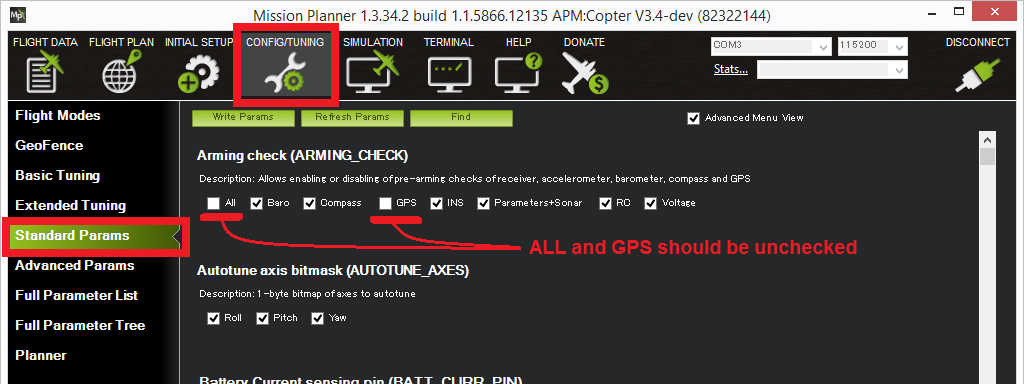
Pour permettre le déverrouillage et le décollage à Loiter sans GPS , la vérification du déverrouillage GPS doit être désactivée comme indiqué dans l'image ci-dessous. Décochez " Tous " et " GPS " et cochez toutes les autres options.
Étant donné que les données du sonar/télémètre doivent être bonnes pour activer le flux optique, des vérifications supplémentaires avant le déverrouillage doivent être effectuées.
Lorsque l'avion est verrouillé, l'avion doit être soulevé directement à une hauteur d'au moins 50 cm mais pas plus de 2 m (si le télémètre affiche une distance supérieure à 2 m , le pilote automatique doit être redémarré ).
Lorsque la vérification du déverrouillage échoue, le message d'erreur est " PreArm: check range finder ".
Cette vérification peut être désactivée en décochant la coche de déverrouillage « Paramètres/Sonar ».
25.1.5 Premier vol
1. Pour EKF2 , définissez EK2_GPS_TYPE = 0 ; pour EKF3 , définissez EK3_SRC1_VELXY = 0 (nous ne voulons pas que EKF utilise le flux optique à ce stade).
2. Survolez dans des conditions STABILIZE ou AltHold (rotor) à un petit angle d'inclinaison dans une plage de hauteur de50 cm à 3 m , oudes conditions QSTABILIZE ou QHOVER (aile fixe quadrotor).
3. Téléchargez le journal flash etdessinez ce qui suit dans Mission Planner .
4. EKF5.meaRng doit être associé aux changements d'altitude de l'avion.
5. OF.flowX et OF.flowY devraient changer.
6. OF.bodyX et OF.bodyY doivent être cohérents avec IMU.GyrX et IMU.GyrY .
25.1.6 Deuxième vol
!Attention
Pour effectuer ce vol en toute sécurité, une distance d'au moins 15 m est requise autour de l'avion. Si l'estimation de la vitesse du flux optique est inexacte, vous ne recevrez que peu d'avertissements et l'avion pourrait très rapidement s'incliner jusqu'à l'angle d'inclinaison maximal.
1. Pour EKF2 , définissez EK2_GPS_TYPE = 3 ; pour EKF3 , définissez EK3_SRC1_VELXY = 5 et EK3_SRC1_POSXY = 0 pour que EKF ignore le GPS et utilise le capteur de débit.
2. Assurez-vous que les modes Loiter et Hover sont disponibles sur l'émetteur.
3. Définissez «l' origine EKF » sur la carte de la station de contrôle au sol. Faites un clic droit dans le planificateur de mission , sélectionnez « Définir le point de départ ici » et sélectionnez le paramètre « Définir l'origine EKF ici ».
4. Décollez en état Loiter et élevez le giravion/quadplan à une hauteur d'environ 1 m .
5. Si l'avion commence à accélérer ou présente un mouvement de tangage ou de roulis irrégulier, passez en vol stationnaire et atterrissez. Vous devrez télécharger le fichier journal et le partager sur les forums pour découvrir pourquoi.
6. S'il reste en position, félicitations, vous avez réussi et vous pouvez maintenant commencer à essayer de changer la hauteur et dele déplacer en mode Loiter .
25.1.7 Paramètres de fonctionnement normaux
Pour EKF2 :
1. Vérifiez EK2_ENABLE = 1 , activez EKF2 .
2. Réglez EK2_FLOW_DELAY en fonction du capteur de débit optique .
3. Pour utiliser uniquement le capteur de débit optique sans GPS , réglez EK2_GPS_TYPE sur 3 ; pour utiliser le GPS avec le capteur de débit optique, réglez-le sur 0 .
Pour EKF3 :
!Remarque
Le firmware ArduPilot 4.1 et versions ultérieures active et utilise EKF3 par défaut .
1. Vérifiez EK3_ENABLE = 1 , activez EKF3 .
2. Définissez AHRS_EKF_TYPE = 3 pour utiliser EKF3 .
3. Définissez EK3_SRC_OPTIONS = 0 pour désactiver FuseAllVelocities .
4. Réglez EK3_FLOW_DELAY en fonction du capteur de flux optique .
5. Réglez EK3_SRC1_POSXY = 3 (position horizontale principale du GPS ,utilisez uniquement le capteur de débit optique lorsqu'il est réglé sur 0 ).
6. Définissez EK3_SRC1_VELXY = 5 (vitesse horizontale principale d'OpticalFlow).
7. Réglez EK3_SRC1_POSZ = 1 (position verticale principale du baromètre).
8. Réglez EK3_SRC1_VELZ = 0 (pas de capteur de vitesse verticale maître).
9. Réglez EK3_SRC1_YAW = 1 (lacet principal/cap de la boussole).
- De plus, le GPS peut fonctionner avec OpticalFlow en utilisant la fonction de commutation de source lumineuse EKF .
- Pour plus d'informations sur la commutation de source EKF , voir Transitions GPS/Non-GPS .
!Remarque
Lorsque le giravion dispose d'un capteur de flux optique (ainsi qu'un télémètre) activé et spécifié comme seule source de position horizontale (par exemple, `EK3_SRCx_VELXY`=OpticalFlow et `EK3_SRCx_POSXY`=None ), et que l'avion est orienté par le pilote nécessitant un estimation de la position Lorsque vous volez en mode de contrôle (c'est-à-dire Loiter ou PosHold ), l'avion ne montera pas au-dessus de l' altitude maximale du télémètre spécifiée dans `RNGFNDx_MAX_CM . Il s'agit d'un mécanisme de sécurité, sinon la sécurité intégrée de l'EKF se déclencherait lorsque l'avion volait en dehors de la portée du télémètre .
25.1.8 Exemple vidéo (Copter-3.4)
25.1.9 Étalonnage en direct
Copter-4.2.0 contient des procédures d'étalonnage en vol :
1. Réglez RCx_OPTION = 158 (étalonnage du flux optique) pour permettre le démarrage de l'étalonnage à partir du commutateur auxiliaire .
2. Réglez l'EKF3 pour qu'il utilise le GPS (par défaut).
- EK3_SRC1_POSXY = 3 (GPS)
- EK3_SRC1_POSZ = 1 (Baro)
- EK3_SRC1_VELXY = 3 (GPS)
- EK3_SRC1_VELZ = 3 (GPS)
- EK3_SRC1_YAW = 1 (Boussole)
- EK3_SRC_OPTIONS = 0 (Désactiver FuseAllVelocities)
3. Pilotez l'avionen mode Loiter sur au moins 10 m (le plus haut sera le mieux, mais dans les limites du télémètre).
4. Tirez l'interrupteur auxiliaire vers le haut pour démarrer l'étalonnage.
5. Utilisez les manettes de roulis et de tangage pour faire basculer l'avion d'avant en arrière dans les directions de roulis et de tangage.
6. Vérifiez l'onglet « Informations » du GCS pour connaître la sortie suivante confirmant la fin de l'étalonnage.
FlowCal : démarré
DébitCal : x : 0 % y : 0 %
DébitCal : x : 66 % y : 6 %
FlowCal : x : 100 % y : 74 %
FlowCal : échantillons collectés
FlowCal : scalarx : 0,976 ajustement : 0,10 <-- les valeurs « d'ajustement » inférieures sont meilleures
FlowCal : scalaire : 0,858, ajustement : 0,04
FlowCal : FLOW_FXSCALER=30,00000, FLOW_FYSCALER=171,0000
7. Faites atterrir l'avion et configurez EKF3 pour utiliser OpticalFlow .
- EK3_SRC1_POSXY = 0 (Aucun)
- EK3_SRC1_VELXY = 5 (flux optique)
- EK3_SRC1_POSZ = 1 (Baro)
- EK3_SRC1_VELZ = 0 (Aucun)
- EK3_SRC1_YAW = 1 (Boussole)
- EK3_SRC_OPTIONS = 0 (Désactiver FuseAllVelocities)
8. Testez à nouveau l'avion pour vérifier ses performances.
Une autre façon d'éviter l'atterrissage et la modification des paramètres de l'EKF3 entre l'étalonnage et les tests consiste à configurer des transitions GPS/Non-GPS afin que le pilote bascule manuellement entre le GPS et le flux optique en vol. En supposant que le pilote utilise l'entrée de télécommande 8 ( interrupteur à 2 positions) pour lancer l'étalonnage et l'entrée de télécommande 9 ( interrupteur à 3 positions) pour basculer entre le GPS et le flux optique, la liste complète des paramètres est la suivante :
- RC8_OPTION = 158 (étalonnage Optflow)
- RC9_OPTION = 90 (EKF Pos Source) le niveau bas est GPS, le milieu est OpticalFlow, le niveau haut est inutilisé
- EK3_SRC1_POSXY = 3 (GPS)
- EK3_SRC1_POSZ = 1 (Baro)
- EK3_SRC1_VELXY = 3 (GPS)
- EK3_SRC1_VELZ = 3 (GPS)
- EK3_SRC1_YAW = 1 (Boussole)
- EK3_SRC2_POSXY = 0 (Aucun)
- EK3_SRC2_VELXY = 5 (flux optique)
- EK3_SRC2_POSZ = 1 (Baro)
- EK3_SRC2_VELZ = 0 (Aucun)
- EK3_SRC2_YAW = 1 (Boussole)
- EK3_SRC_OPTIONS = 0 (Désactiver FuseAllVelocities)
!Remarque
Pour utiliser l'étalonnage en vol, EKF3 doit être activé . Il s'agit du paramètre par défaut pour ArduPilot 4.1 et supérieur.