"
De nos jours, les dispositifs intelligents capables de se déplacer de manière autonome, tels que les robots et la conduite autonome, se développent de plus en plus vite, les algorithmes de contrôle deviennent de plus en plus complexes et les systèmes de perception de plus en plus puissants. Le capteur IMU, qui mesure le mouvement et l'attitude des objets contrôlés, constitue un élément important du système de perception et évolue également dans le sens d'un faible coût et d'une haute précision. Dans ce numéro technique, nous avons invité Wang Qi, un ingénieur de Xiaomi , à discuter de l'IMU comme sujet principal. De ce qu'est l'IMU à son principe de fonctionnement, combiné à des applications spécifiques, nous montrerons le « capteur de position » du robot sous plusieurs angles.
»
1. Qu'est-ce que l'IMU ?
Notre corps effectue constamment divers mouvements, comme se tenir debout, s'asseoir, se coucher, etc. Les mots « debout », « assis » et « couché » ici sont très importants pour nous. C'est une chose naturelle, mais avez-vous Avez-vous déjà remarqué une chose : comment savoir si nous sommes « debout », « assis » ou « couchés » ?
En fait, il existe dans notre corps un organe très discret mais extrêmement important, le récepteur de position, qui est la clé du mouvement et de l'équilibre normaux du corps. Imaginez, après avoir tourné en rond plusieurs fois, ne nous sentons-nous pas étourdis, voire incapables de marcher dans les cas graves ? Bien que notre vision, notre ouïe, notre toucher, etc. fonctionnent tous normalement à ce moment-là, il existe en réalité un problème avec les récepteurs de position, de sorte que le corps ne peut pas ressentir sa posture actuelle et ne peut pas maintenir son équilibre.
De même, il existe un tel capteur de position sur le robot - IMU, qui est utilisé pour mesurer les informations de mouvement et de posture du robot. Son processus de travail est également le même que celui du capteur de position, et les résultats de mesure sont rapportés au mouvement du robot. module de contrôle (cervelet). ), le module de contrôle de mouvement prend des décisions sur la base de ces informations et donne des instructions aux terminaux d'exécution (mains, jambes, pieds) pour contrôler le mouvement du robot.
Au sens étroit, IMU fait référence à une unité de mesure inertielle , qui peut mesurer l'accélération sur trois axes et la vitesse angulaire sur trois axes d'un objet se déplaçant dans un espace tridimensionnel, puis obtenir l'attitude de l'objet grâce à la fusion de données et autres algorithmes ; en utilisation réelle, IMU fait généralement référence aux capteurs qui mesurent le mouvement et l'attitude des objets contrôlés , notamment IMU, VRU, AHRS, etc. au sens étroit. Pour les robots, la qualité des données IMU détermine directement les performances de mouvement du robot. En fait, l'IMU n'est pas seulement utilisée dans le domaine de la robotique, mais a également des applications dans de nombreux domaines, allant des avions, missiles et engins spatiaux aux téléphones mobiles, bracelets électroniques, etc.
2. Comment l'IMU détecte-t-elle la posture ?
▍Quelle est la posture ?
L'attitude est la rotation d'un objet par rapport aux axes d'un système de coordonnées. De manière générale, lorsque nous parlons de posture, nous faisons référence à la rotation d'un objet par rapport à son propre système de coordonnées, mais nous pouvons calculer sa posture par rapport à d'autres systèmes de coordonnées grâce à la transformation de rotation. Par exemple, sur l'image, deux personnes voient un objet au sol. A pense qu'il vaut 6 et B pense qu'il vaut 9. Afin de résoudre ce problème, nous avons établi un système de coordonnées pour A et B et l'objet au sol. . Il est stipulé que l'objet au sol est 6 et la direction initiale de x. Le crochet pointant vers 6, la direction x du système de coordonnées de A et B est parallèle à la direction x de l'objet, et la direction y est verticalement vers le haut. De cette façon, grâce à la conversion de coordonnées, l'objet au sol ressemble à 6 à A, et l'objet au sol ressemble à 6 à B, mais c'est juste " 6 retourné".
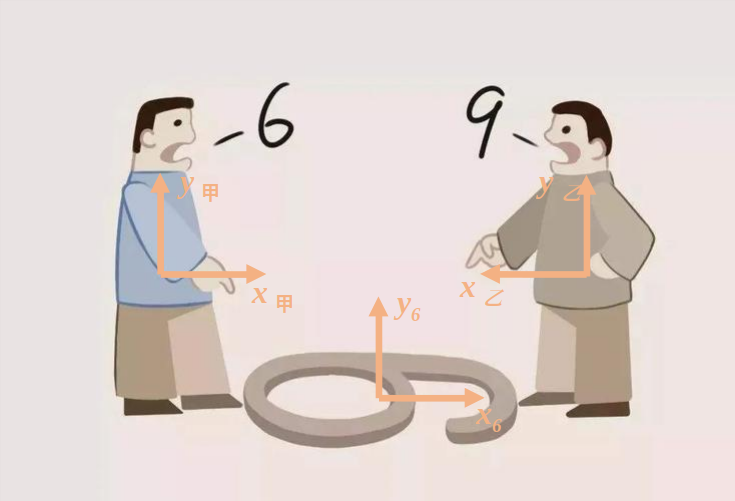 Figure 1 Posture relative des objets
Figure 1 Posture relative des objets
Nous utilisons un langage mathématique pour décrire le contenu ci-dessus. En prenant le système de coordonnées bidimensionnel comme exemple, nous utilisons deux valeurs d'angle pour représenter la posture et la posture relative de chaque objet (unité : deg). Premièrement, les postures de A, B et des objets au sol par rapport à leur propre système de coordonnées. Tous sont :
La posture de l'objet 6 par rapport à A, c'est-à-dire la posture de l'objet aux yeux de A est :
D'abord
La posture de l'objet 6 par rapport à B, c'est-à-dire la posture de l'objet aux yeux de B est :
Deuxième
La méthode ci-dessus pour exprimer la posture est en fait la méthode de représentation de l'angle d'Euler la plus intuitive en matière de représentation de la posture. Dans l'espace cartésien tridimensionnel, l'angle de rotation de l'objet autour de trois axes est utilisé pour représenter l'attitude de l'objet :
Il est généralement défini que l'angle de rotation autour de l'axe x est l'angle de roulis (roulis), l'angle de rotation autour de l'axe y est l'angle de tangage (tangage) et l'angle de rotation autour de l'axe z est l'angle de lacet (lacet), comme le montre la figure 2.

Figure 2 L'angle d'Euler représente l'attitude
Source de l'image : https://www.youtube.com/watch?v=UpSMNYTVqQI
Bien que les angles d'Euler soient intuitifs, ils présentent certaines limites lorsqu'ils sont utilisés pour exprimer des postures. La définition de l'ordre de rotation affectera les résultats de la rotation. Par exemple, l'objet 6 de la figure 2 tourne d'abord de 90 degrés autour de x, puis de 90 degrés autour de y. , et d'abord autour de y. Les résultats obtenus en tournant de 90 degrés puis en tournant de 90 degrés autour de x sont différents ; un autre exemple est le problème de blocage du joint universel qui se produit pendant la rotation, qui est également causé par la séquence de rotation.
En réalité, la plupart des rotations du corps rigide s’effectuent en une seule fois. Par exemple, si nous voulons prendre un selfie, notre tête doit être inclinée de 45 degrés vers le haut pour que la photo soit belle. Lorsque la tête est tournée, elle doit tourner autour d'un certain axe à un certain angle et atteindre directement le 45 degrés. posture en diagonale vers le haut, au lieu de tourner d'abord horizontalement de 45 degrés, puis de tourner vers le haut de 45 degrés. Par conséquent, l'attitude peut également être exprimée par un angle d'axe ou un quaternion, qui « atteint directement une certaine attitude ».
L'attitude est représentée par l'angle de l'axe. L'axe est l'axe de rotation et est représenté par un vecteur tridimensionnel. L'angle est l'angle de rotation autour de l'axe de rotation. Par conséquent, l'angle de l'axe peut être exprimé comme suit :
Les quaternions sont définis dans un espace à quatre dimensions et possèdent de nombreuses bonnes propriétés lorsqu'ils sont utilisés pour représenter la posture d'objets, mais ils ne sont pas très intuitifs. La représentation des quaternions est la suivante :
La relation de conversion entre le quaternion et l'angle de l'axe est la suivante :
où est l'angle de rotation, et est l'axe de rotation, afin que nous puissions sentir comment le quaternion représente la posture de côté.
De plus, les méthodes d'expression de la posture incluent la matrice cosinus directionnelle, l'algèbre de Lie du groupe de Lie, etc., qui ne seront pas présentées ici.
▍Le principe de la mesure de l'attitude par l'IMU
Prenons l'exemple de l'unité de mesure inertielle (MEMS IMU). Elle se compose d'un accéléromètre à trois axes et d'un gyroscope à trois axes. Elle peut mesurer l'accélération et la vitesse angulaire d'un objet se déplaçant dans un espace tridimensionnel. Alors, comment pouvons-nous utiliser l'accélération ou la vitesse angulaire pour obtenir l'attitude de l'objet ? Un drap de laine ?
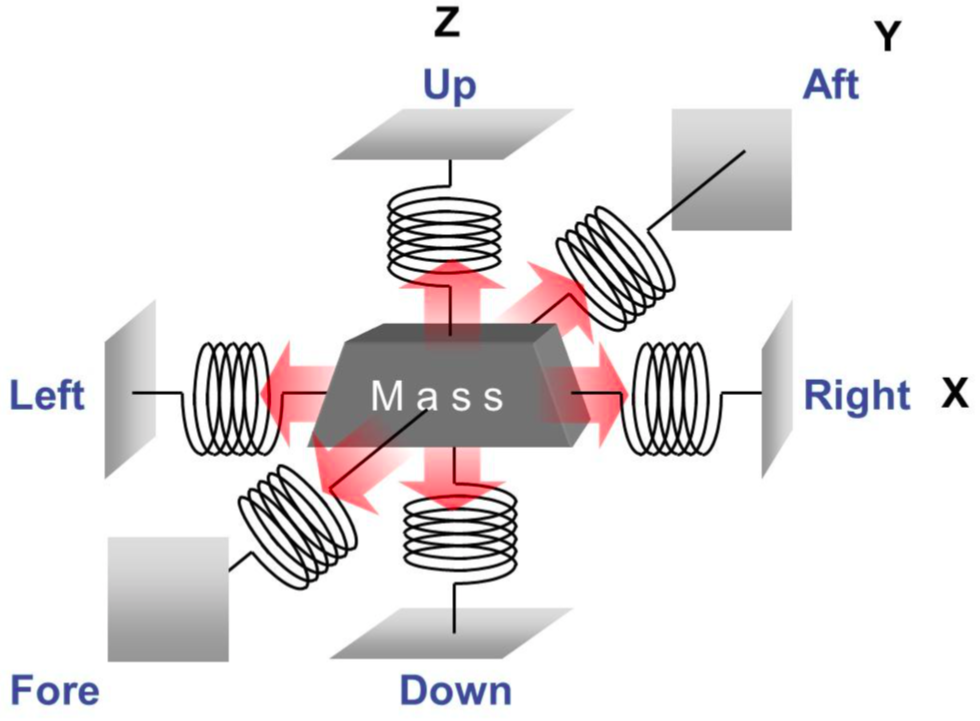
Figure 3 Principe de fonctionnement de l'accéléromètre
Source de l'image : https://www.zhihu.com/question/19769131/answer/886359013
Le principe de l'accéléromètre MEMS mesurant l'accélération est en fait la deuxième loi de Newton. Comme le montre la figure 3, l'inertie générée lorsqu'un objet de masse se déplace entraînera la déformation des parties porteuses de force des deux côtés. Dans MEMS, des tensions changeantes sont utilisées pour mesurer cela. déformation. C'est-à-dire qu'il y a deux plaques de condensateur fixes des deux côtés et une plaque de condensateur mobile au milieu, ce qui équivaut à un objet avec une masse. De cette façon, la déformation peut être reflétée sur les changements de capacité des deux côtés. , et l'objet peut être obtenu par conversion analogique-numérique et d'autres méthodes.L'accélération du mouvement.
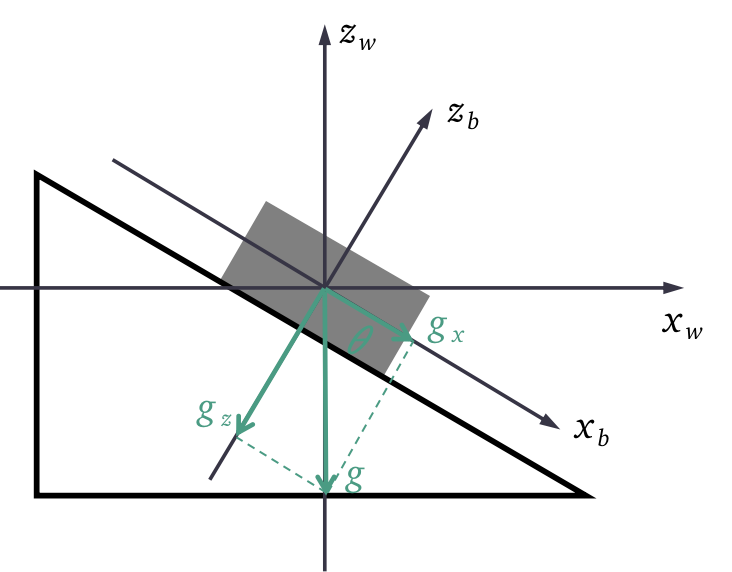
Figure 4 Principe de mesure de l'attitude d'accélération
Lorsque l'IMU est au repos, l'accélération mesurée par l'accéléromètre est l'accélération de la gravité. Grâce à cette propriété, l'axe z du système de coordonnées mondial est défini comme étant parallèle à l'accélération de la gravité et vers le haut. Basé sur la synthèse et décomposition des forces, la position relative de l'objet par rapport au monde peut être obtenue. L'attitude du système de coordonnées. Comme le montre la figure 4, lorsque l'objet tourne selon un angle, l'accéléromètre peut mesurer la composante de l'accélération de la gravité sur l'axe des x, calculant ainsi l'angle inclus, c'est-à-dire l'angle de rotation de l'objet autour de l'axe y. De la même manière, on peut également obtenir l'objet autour de l'axe X. L'angle de rotation de l'axe, c'est le principe de base de l'attitude de mesure d'accélération. Cependant, l'accéléromètre MEMS actuel présente un bruit à haute fréquence et l'attitude calculée à partir de l'accélération sur une courte période est inexacte.
Le gyroscope mécanique traditionnel utilise le principe de conservation du moment cinétique, c'est-à-dire que la direction de l'axe de rotation d'un gyroscope rotatif à grande vitesse reste inchangée lorsqu'il n'est pas affecté par des forces externes. C'est la nature à axe fixe du gyroscope. , et sa précession est essentiellement due à l'axe fixe. Évidemment, cette méthode n'est pas réaliste si elle est appliquée aux MEMS, c'est pourquoi une autre méthode est utilisée pour mettre en œuvre le gyroscope MEMS.
Figure 5 L'axe fixe et la précession du gyroscope
Source de l'image : https://www.youtube.com/watch?v=n_6p-1J551Y
Le principe du gyroscope MEMS mesurant la vitesse angulaire est qu'un objet en rotation générera une force de Coriolis lorsqu'il aura un mouvement radial. Sa direction est perpendiculaire au plan formé par la direction de la vitesse radiale et la direction de la vitesse angulaire de rotation, et son amplitude est :
est la masse de l'objet, est la vitesse angulaire de rotation de l'objet et est la vitesse du mouvement radial de l'objet.
Dans les MEMS, il existe des plaques capacitives orthogonales radiales et tangentielles. La plaque capacitive radiale applique une tension oscillante pour entraîner le mouvement de la masse. Lorsque l'objet tourne pour générer une vitesse angulaire, l'objet produit un déplacement tangentiel en raison de la force de Coriolis. Cela provoque la tension de la plaque du condensateur tangentiel à changer, puis l'accélération de Coriolis est obtenue par conversion analogique-numérique et d'autres méthodes. La vitesse angulaire de l'objet peut être calculée selon la formule ci-dessus.
Figure 6 Principe de fonctionnement du gyroscope MEMS
Source de l'image : Basics丨Comment fonctionne un gyroscope MEMS ? - Comité de robotique de la Société chinoise d'automatisation
Le principe du calcul nous dit que l'intégrale de la vitesse angulaire est l'angle. On peut donc directement intégrer la vitesse angulaire sur trois axes mesurée par le gyroscope pour obtenir l'angle de rotation de l'objet autour des trois axes. Cependant, le gyroscope MEMS réel comportera diverses erreurs dues à des raisons telles que le processus, la température, les vibrations, etc. Ces erreurs rendront l'angle obtenu par le gyroscope de plus en plus imprécis au fur et à mesure de son intégration. Le résultat final est que l'objet est clairement dans le "Debout", mais l'IMU lui dit qu'il est "couché". Quelle est la solution ?
▍Calcul d'attitude IMU
Nous avons constaté que même si l'attitude obtenue par accélération est inexacte à court terme, il n'y a pas d'erreur intégrale et on peut lui faire confiance à long terme ; bien que l'attitude obtenue par vitesse angulaire ait une erreur intégrale à long terme, elle peut être confiance à court terme. Donc, si nous y croyons tous les deux un peu, ne serions-nous pas en mesure d’adopter une position à long terme, stable et précise ? À partir de là, nous avons découvert la méthode de fusion de données la plus simple :
Bien entendu, cette méthode de fusion simple ne peut pas être utilisée directement dans l'IMU dans la pratique. En raison des caractéristiques de bruit du capteur, etc., il est difficile d'ajuster les paramètres pour obtenir la convergence. Voici juste un exemple. Or, la méthode de fusion de données repose sur cette idée simple : croire un peu ici et un peu là, mais il faut utiliser des méthodes scientifiques pour arriver à « croire un peu ici et croire un peu là ».
La fusion de données IMU est également appelée calcul d'attitude. Les algorithmes couramment utilisés incluent le filtrage complémentaire (filtre complémentaire), le filtrage bayésien (filtre bayésien), etc. L'algorithme Mahony est largement utilisé dans le filtrage complémentaire, et son principe complémentaire est similaire au pid ; il existe également l'algorithme Madgwick basé sur l'optimisation de la descente de gradient, etc. L'algorithme classique du filtrage bayésien est le filtre de Kalman (KF) et ses algorithmes dérivés, tels que le filtre de Kalman étendu (EKF), le filtre de Kalman à état d'erreur (ESKF), le filtre de Kalman étendu auto-adaptatif (AEKF), etc. Par rapport à la méthode de filtrage complémentaire, le filtrage de Kalman fusionne les données basées sur le modèle bayésien et peut obtenir une estimation impartiale de la cible.
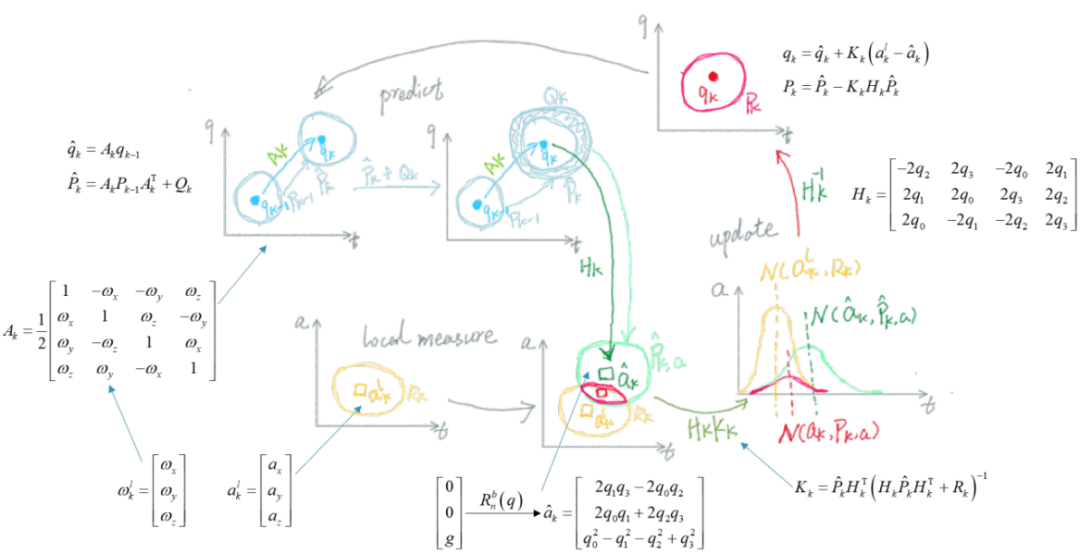
Figure 7 Calcul d'attitude IMU basé sur un filtre de Kalman étendu [1]
Comme le montre la figure 7, en prenant comme exemple le filtre de Kalman étendu pour la solution d'attitude, une itération en boucle fermée est effectuée sur le quaternion. Le filtrage de Kalman est principalement divisé en deux parties : la prédiction et la mise à jour. Nous présenterons brièvement les deux parties respectivement.
La première est la partie prédiction, qui prédit l'attitude et sa matrice de covariance. La prédiction ici est une prédiction intégrale utilisant la vitesse angulaire mesurée par le gyroscope. L'équation de transition d'état est dans la figure, qui peut être obtenue grâce à l'équation différentielle des quaternions. .
Vient ensuite la partie mise à jour, où les valeurs prédites et les valeurs observées sont comparées et comparées pendant la mise à jour. La valeur prédite ici est l'attitude obtenue dans la partie prédiction, et la valeur observée est la composante à trois axes de l'accélération de la gravité mesurée avec un accéléromètre. Comment faire une différence dans la comparaison entre l'attitude et l'accélération ? Nous avons pensé que dans l'analyse ci-dessus, l'accélération peut être utilisée pour obtenir l'attitude, afin que la différence entre l'attitude et l'attitude puisse être faite ; de la même manière, nous pouvons également convertir l'attitude en accélération, afin que la différence puisse également être faite. . Le rôle de la matrice de mesure est ici, elle peut transformer le vecteur prédit de l'espace de prédiction vers l'espace d'observation. Étant donné que la transformation de l'espace de prédiction en espace d'observation est généralement une relation non linéaire et ne satisfait pas l'hypothèse de distribution gaussienne du filtre de Kalman, dans EKF, le développement de Taylor du premier ordre de l'équation de transformation est utilisé pour approximer cette relation linéaire, et le la matrice de mesure est l'équation de transformation La matrice jacobienne.
L'équation de conversion de l'espace de prédiction vers l'espace d'observation est illustrée à la figure 7. Elle contient deux significations, l'une consiste à convertir l'attitude prédite en accélération prédite et l'autre à convertir l'accélération prédite en système de coordonnées où l'accélération prédite est observée. l'accélération est localisée. S'il n'y a pas d'erreur dans l'attitude prédite, alors lorsque l'attitude prédite est utilisée pour convertir l'accélération gravitationnelle dans le système de coordonnées d'observation, elle doit coïncider complètement avec l'accélération observée, car l'accélération observée est l'accélération gravitationnelle dans le système de coordonnées d'observation. , et c'est précisément à cause de l'attitude prédite qu'il y a une erreur, qui conduit finalement à un écart entre l'accélération prédite et l'accélération observée. Ce que fait le filtre de Kalman, c'est effectuer une moyenne pondérée des deux pour obtenir une estimation non biaisée de l'accélération, puis utilisez l'inverse de la matrice de mesure pour convertir l'accélération en attitude, obtenant ainsi une estimation impartiale de l'attitude. C'est le principe de base de l'EKF pour le calcul d'attitude IMU.
▍ Que fait l'AHRS ?
Dans le processus de mesure de l'attitude de l'IMU ci-dessus, nous avons constaté que l'accélération gravitationnelle n'a qu'une projection sur le plan xz et le plan yz, et sur le plan xy, quelle que soit la façon dont elle tourne, la projection de l'accélération gravitationnelle n'est qu'un point et l'angle de rotation autour de l'axe Z ne peut pas être calculé. Par conséquent, l'IMU ne peut mesurer la rotation autour de l'axe Z qu'en s'appuyant sur l'intégrale de vitesse angulaire. Comme nous l'avons dit précédemment, l'intégrale de vitesse angulaire sera avoir des erreurs d'intégration à long terme. Alors comment corriger la rotation autour de l'axe z ? La réponse est d'utiliser un magnétomètre.
Nous avons mentionné plus tôt que l'IMU généralisée inclut l'AHRS. AHRS fait référence au système de référence d'attitude et de cap, qui comprend des gyroscopes à trois axes, des accéléromètres et des magnétomètres à trois axes basés sur MEMS. Il intègre des algorithmes de fusion de données internes et peut directement produire ses propres informations d'attitude. L'AHRS à dix axes dispose également d'un baromètre pour mesurer l'altitude.
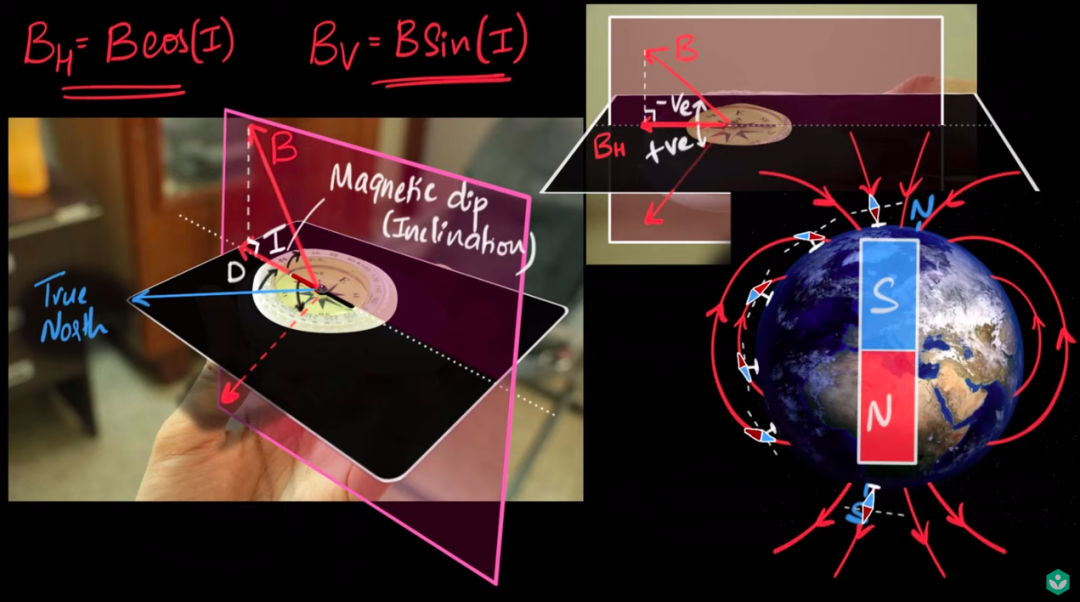
Figure 8 Le magnétomètre mesure le champ géomagnétique
Source de l'image : https://www.youtube.com/watch?v=qXVLXrOB8Ag&feature=youtu.be
Un magnétomètre peut mesurer la taille et la direction du champ géomagnétique. La plupart du temps, la direction du champ géomagnétique forme un certain angle avec la direction de la gravité. Par conséquent, l'angle de rotation d'un objet autour de l'axe z peut être calculé grâce à la projection du champ géomagnétique sur le plan xy. Le principe est le même que l'attitude de mesure de l'accélération gravitationnelle est la même, puis les données peuvent être fusionnées avec l'angle obtenu en intégrant la vitesse angulaire. Grâce à l'AHRS à neuf axes, une mesure d'attitude stable et à long terme de l'objet peut être obtenue. C'est également l'IMU utilisée aujourd'hui dans la plupart des commandes de robots. Cependant, aux pôles terrestres, la direction du champ magnétique est presque parallèle à la gravité, et la méthode de calcul de l'attitude à travers le champ magnétique échoue également. L'AHRS peut être considéré comme dégénérant en six axes. De plus, en raison de la faible intensité du champ géomagnétique, la méthode d'utilisation d'un magnétomètre échouera également dans des environnements soumis à de fortes interférences magnétiques.
De plus, il existe un système de navigation inertielle (INS), qui intègre le GPS et détecte non seulement sa propre posture, mais fournit également une position stable, une vitesse et d'autres informations, ce qui rend sa fonction plus puissante.
2. Quelques applications de l'IMU
▍Le rôle de l'IMU chez les robots à pattes
L’application la plus importante de l’IMU dans les robots à pattes est le contrôle de la boucle fermée. L'objectif du contrôle de mouvement d'un robot à pieds est de contrôler le mouvement du robot pour atteindre une position spécifiée. Par exemple, lorsque le robot est en marche, l'objectif principal du contrôle est de le maintenir en équilibre et de ne pas tomber. Uniquement sur cette base L'action de courir peut-elle être réalisée, tout comme un humain. Si vous tombez, vous ne pourrez certainement pas courir. Plus précisément, l'attitude du corps du robot est contrôlée par les données renvoyées par l'IMU pour garantir que son roulis Les angles de tangage et de lacet restent aux positions attendues.

Figure 9 Robot Iron Egg en mouvement
Source de l'image : https://www.mi.com/cyberdog
Nous avons mentionné la fusion de données plus tôt et nous n'avons introduit la fusion de données qu'au sein de l'IMU. Il existe généralement de nombreux capteurs sur les robots, tels que des capteurs visuels, lidar, ultrasons, TOF, etc. Une variété de capteurs forment ensemble le système de perception du robot, tout comme nos récepteurs humains visuels, auditifs, tactiles et autres. Semblable à l'IMU, divers capteurs ont leurs limites. Par exemple, le SLAM visuel est facilement affecté par l'occlusion de l'image, les changements d'éclairage, les interférences d'objets en mouvement, les scènes à texture faible, etc., et est facilement perdu lors d'un mouvement rapide. Le SLAM laser manque d'informations sémantiques , etc. Par conséquent, une variété de capteurs sont nécessaires pour la fusion des données.
L'IMU peut réaliser une estimation d'attitude lors d'un mouvement rapide, effectuer une fusion de données avec d'autres capteurs et fournir à d'autres capteurs des informations préalables précises. Par exemple, la fusion de l'IMU et du capteur visuel peut obtenir la posture initiale du capteur visuel et réduire l'erreur provoquée par le mouvement de la source de détection ; en même temps, l'IMU peut également être utilisée pour interpoler et lisser l'image. image visuelle. À son tour, le capteur visuel lui-même présente des caractéristiques telles que la non-dérive et la mesure directe de la translation et de la rotation, qui peuvent être utilisées pour calibrer la dérive de l'IMU et améliorer la précision de l'IMU. Grâce à des « avantages complémentaires », la fusion multicapteurs fournit un système de détection stable et fiable pour les robots, qui est un élément indispensable du système robot intelligent.
▍Le rôle de l'IMU dans d'autres domaines
Nous prenons ici comme exemples plusieurs sociétés IMU qui sont à la pointe du monde en matière de technologie industrielle pour présenter certaines applications de l'IMU dans d'autres domaines.
>>>> Xsens
Xsens est une société néerlandaise qui se concentre sur le développement et la production de capteurs inertiels, de systèmes de navigation inertielle et d'équipements de capture de mouvement. Ses produits sont principalement utilisés dans des domaines tels que l'analyse du mouvement, la mesure de la posture, la réalité virtuelle, l'interaction homme-machine et la rééducation médicale. Les produits Xsens sont principalement divisés en trois catégories : les capteurs inertiels (AHRS, IMU), les systèmes de navigation inertielle (INS) et les dispositifs de capture de mouvement (MVN). Parmi eux, les capteurs inertiels sont principalement utilisés pour mesurer des grandeurs physiques telles que l'accélération, la vitesse angulaire et l'intensité du champ magnétique des objets, et peuvent être utilisés pour la mesure d'attitude, l'analyse de mouvement et la navigation. Les systèmes de navigation inertielle sont basés sur des capteurs inertiels et combinent géomagnétisme, pression atmosphérique et GPS. et d'autres capteurs pour obtenir une mesure d'attitude et une navigation de haute précision ; l'équipement de capture de mouvement est utilisé pour capturer la trajectoire de mouvement du corps humain ou des objets, et peut être utilisé dans des domaines tels que la réalité virtuelle et le mouvement. capturer.

Figure 10 Équipement MTi AHRS de Xsens
Source de l'image : https://www.movella.com/
L'équipement de capture de mouvement optique traditionnel nécessite un lieu de capture de mouvement dédié, utilisant des caméras à grande vitesse réparties pour capturer les points réfléchissants attachés au corps humain, puis post-traitement pour restaurer les mouvements du corps. La capture de mouvement optique est principalement utilisée pour une haute précision. données de mouvement, tels que la production de jeux, le tournage de films, etc. Bien que ce type de système de capture de mouvement soit très précis, il est coûteux et peu pratique. Par conséquent, dans certains domaines tels que la réalité virtuelle et la récupération médicale, les systèmes de capture de mouvement inertiels sont désormais utilisés pour calculer et restituer les mouvements du corps humain en temps réel à l'aide des données d'attitude. renvoyé par l’IMU.
Xsens MVN Link est un produit de la série de capture de mouvement de Xsens, qui peut réaliser une capture de mouvement sans équipement externe. Il n'a besoin que de capteurs portés sur le corps pour obtenir des données, sans avoir besoin d'installer des caméras et autres équipements externes. L'une des technologies clés consiste à utiliser l'IMU pour détecter les données de posture du corps humain ou d'autres objets en temps réel, et les transmettre à l'appareil pour rejouer l'action ou effectuer un autre post-traitement. application d'équipements de capture de mouvement inertiel.
Source vidéo : https://mp.weixin.qq.com/s/_rWwnZ2vy2ZfjXcq_b-v3A
>>>> Microdéformation
Microstrain est une entreprise américaine spécialisée dans la R&D et la production de capteurs inertiels et de systèmes de navigation inertielle. Ses produits sont principalement utilisés dans l'aérospatiale, la défense nationale, le contrôle d'automatisation, l'analyse de mouvement et d'autres domaines. Les produits de Microstrain sont réputés pour leur haute précision, leur grande stabilité et leur grande fiabilité, et sont largement utilisés dans divers domaines. Ses clients comprennent de nombreuses entreprises et institutions bien connues, telles que Boeing, Lockheed Martin, le département américain de la Défense et la NASA. attendez.
Les produits RTK de Microstrain sont des solutions de positionnement dynamique en temps réel basées sur la technologie du système de positionnement global (GPS). Ils utilisent des récepteurs GPS et des IMU de haute précision pour fournir des informations de positionnement et de navigation très précises. Ils sont actuellement utilisés dans l'arpentage et la production de cartes, les bâtiments. Il a des applications dans la surveillance, le transport, l'agriculture, etc.
Les systèmes RTK peuvent être grossièrement divisés en plusieurs types en termes d'application : Système UAV RTK : ce système peut fournir des capacités de positionnement de haute précision pour les drones, prendre en charge une variété de systèmes de commandes de vol et est léger, facile à installer et à utiliser ; RTK fixe système : ce système peut fournir des capacités de positionnement de haute précision pour les équipements fixes, tels que la surveillance des bâtiments, la surveillance des ponts, l'exploration géologique et d'autres domaines ; Système RTK mobile : ce système peut fournir des capacités de positionnement de haute précision pour les appareils mobiles, tels que la navigation des véhicules , navigation maritime et navigation robotique.

Figure 11 Équipement RTK 3DM de Microstrain
Source de l'image : https://www.microstrain.com/
La vidéo ci-dessous montre très bien la précision de positionnement du 3DM RTK de Microstrain. Les ingénieurs ont conçu une voiture capable de naviguer de manière autonome, y ont installé un tube lumineux LED à changement de couleur et ont utilisé une photographie à longue exposition pour restaurer la trajectoire de mouvement de la voiture. S'appuyant sur les capacités de perception en temps réel de haute précision de RTK, la voiture a réussi à restaurer plusieurs œuvres d'art et sa précision de positionnement a atteint le niveau centimétrique. La précision de l'angle de lacet de l'IMU a joué un rôle clé dans la croisière directionnelle de la voiture.
Source vidéo : https://youtu.be/iVUTnPN4m-Y
6. Résumé
Cet article présente brièvement le capteur de posture du système de perception du robot et son principe de fonctionnement. Bien qu'il semble discret, il joue un rôle très important. De nos jours, les dispositifs intelligents capables de se déplacer de manière autonome, tels que les robots et la conduite autonome, se développent de plus en plus vite, les algorithmes de contrôle deviennent de plus en plus complexes et les systèmes de perception de plus en plus puissants. En tant qu'élément important du système de perception, l'IMU peut être vue dans tous les domaines, de l'électronique civile à l'aérospatiale. Son prix varie de quelques dollars au niveau civil à des dizaines ou des millions au niveau stratégique. Les IMU sont également dans le sens d'un faible coût. et haute précision.
Bien entendu, les capacités d’un seul capteur sont limitées et seule la fusion de plusieurs capteurs peut maximiser leurs effets respectifs. La perception par fusion multicapteurs est devenue l'un des sujets brûlants dans des domaines tels que la robotique et la conduite autonome.Avec les algorithmes traditionnels de fusion de données et l'apprentissage en profondeur et d'autres méthodes, la précision du système de perception s'améliore progressivement. On pense que les robots pourront entrer dans des milliers de foyers à l'avenir, s'appuyer sur leurs puissantes capacités sensorielles pour interagir avec les gens, devenir l'un des principaux acteurs de la production sociale et apporter du confort à la vie humaine.
les références:
[1] Sabatelli S, Galgani M, Fanucci L, et al. Un filtre de Kalman à deux étages pour le suivi de l'orientation avec un processeur intégré dans 9-D IMU[J].IEEE Transactions on Instrumentation and Measurement, 2013, 62(3) :590-598.

