1. Téléchargez Anaconda
Miroir Tsinghua : Index de /anaconda/archive/ | Station miroir du logiciel Open Source de l'Université Tsinghua | Miroir Open Source Tsinghua

Le fichier Anaconda3-2023.03-Linux-x86_64.sh téléchargé est illustré dans la figure :
 Faites un clic droit sur le dossier et cliquez sur Ouvrir dans le terminal :
Faites un clic droit sur le dossier et cliquez sur Ouvrir dans le terminal :

Entrez la ligne de commande suivante :
bash Anaconda3-2023.03-Linux-x86_64.sh
Tapez oui et appuyez sur Entrée

Ensuite, il y a un tas d'accords, continuez à appuyer sur la touche Entrée pour sauter

Arrêtez d'appuyer sur Entrée lorsqu'une nouvelle question se présente

Tapez oui et appuyez sur Entrée

Appuyez sur la touche Entrée pour sélectionner le répertoire d'installation par défaut (par défaut, un dossier nommé anaconda3 est créé dans le répertoire personnel de l'utilisateur comme adresse d'installation) et attendez la fin de l'installation.
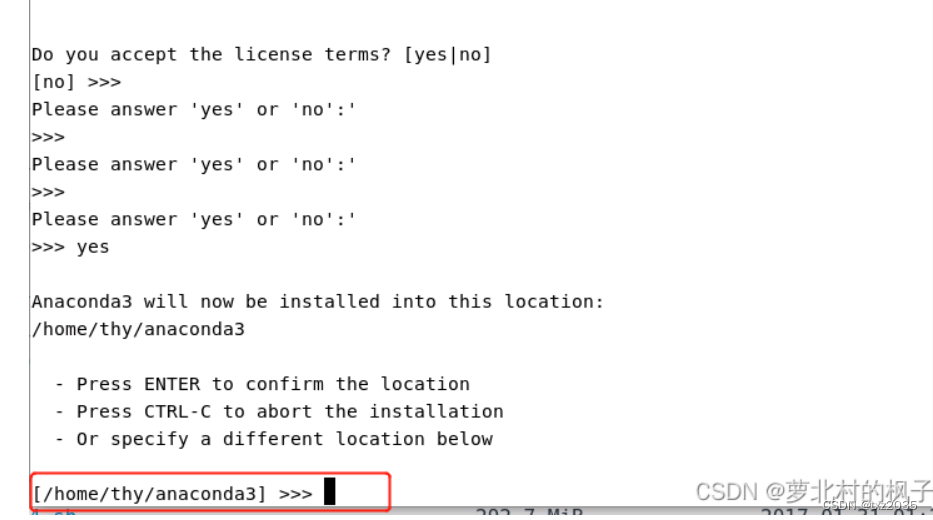
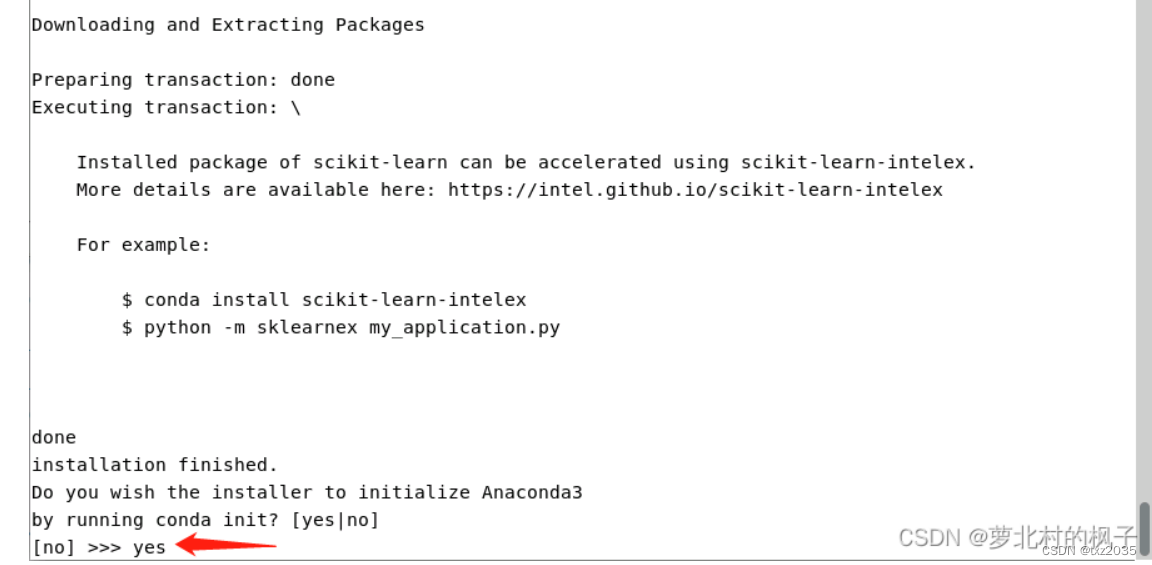
Tapez oui et appuyez sur Entrée ( appuyez sur non !!!! )
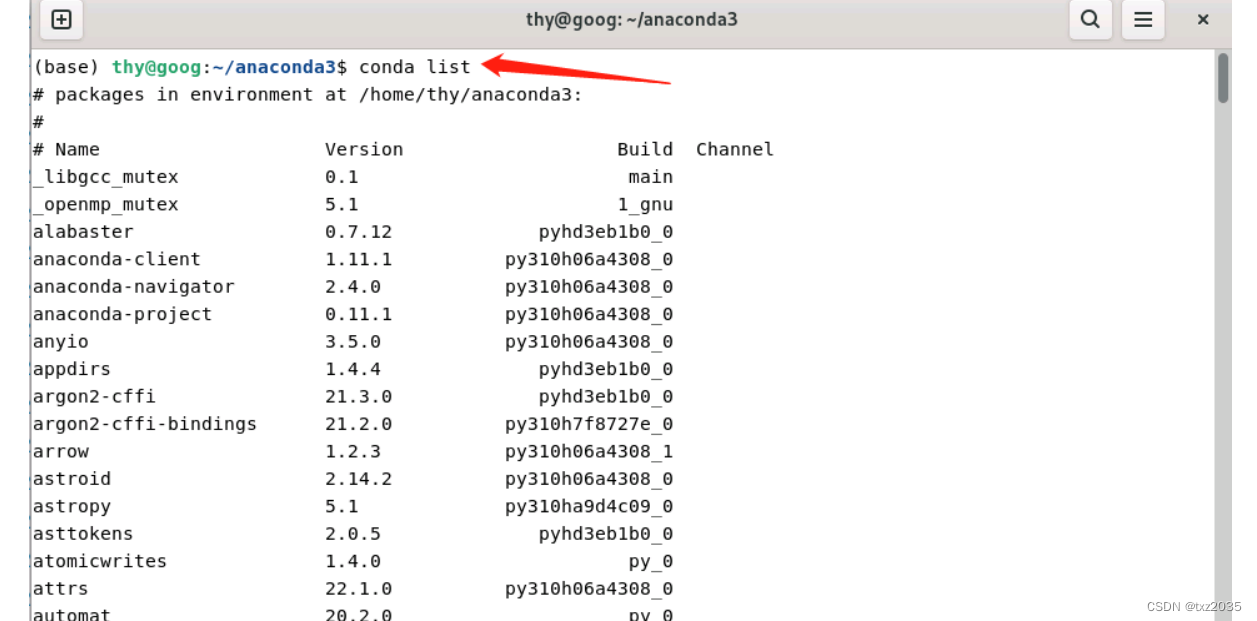
Entrez dans la liste conda, vous pouvez voir le package installé par anaconda et vérifier que l'installation d'anaconda est terminée
Deuxièmement, téléchargez pycharm
https://www.jetbrains.com/pycharm/

Sélectionnez la version Linux à télécharger
terminal ouvert
Notez que la version est installée selon sa propre version
Entrez dans l'ordre : S'il y a une erreur, cela signifie que le chemin de téléchargement de votre package compressé n'est pas dans Téléchargements, recherchez le package compressé et cd-le vous-même.
Téléchargements de CD
sudo tar -xvf pycharm-community-2022.3.3.tar.gz -C /opt/
Une fois la décompression terminée
cd /opt/pycharm-community-2021.1.1/bin/
./pycharm.sh
Troisièmement, créez un environnement virtuel
créer créer -n openpcdet python=3.8
Activez l'environnement virtuel :
conda active openpcdet
Chaque version correspond à pytorch et torchvision :
Versions précédentes de PyTorch | PyTorch
Installer Python
pip install torch==1.8.1+cu111 torchvision==0.9.1+cu111 torchaudio==0.8.1 -f https://download.pytorch.org/whl/torch_stable.html -i https://pypi.tuna .tsinghua.edu.cn/simple
Vérifiez que l'installation a réussi :
python
importation torche
print(torch.__version__)
print(torch.cuda.is_available())
Quatrièmement, téléchargez cmake : l'adresse de téléchargement officielle est : https://cmake.org/download/
tar -xvzf cmake-3.22.4-linux-x86_64.tar.gz
sudo mv cmake-3.22.4-linux-x86_64 /opt/cmake-3.22.4
# Créer un lien symbolique
sudo ln -sf /opt/cmake-3.22 .4/bin/* /usr/bin/
Vérifiez la version de cmake :
cmake --version

Cinq, installez spconv
Voir la version :
nvidia-smi
Version CUDA : 12.0
miroirs / traveller59 / spconv · GitCode
pip installer spconv-cu120
git clone https://github.com/traveller59/spconv.git --recursive
cd spconv/
pip installer pccm
python setup.py bdist_wheel
cd ./dist
pip install * -i https://pypi.tuna.tsinghua.edu.cn/simple
Vérifiez que l'installation a réussi :

Sixièmement, téléchargez OpenPCDet et installez les dépendances
Créez un dossier et ouvrez une fenêtre de commande dans le dossier
git clone https://github.com/open-mmlab/OpenPCDet.gitActiver l'environnement virtuel : conda activate openpcdet
Entrez le chemin où se trouvent les exigences :
cd dianyun
cd OpenPCDet
Télécharger les dépendances :
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple

mettre en œuvre:
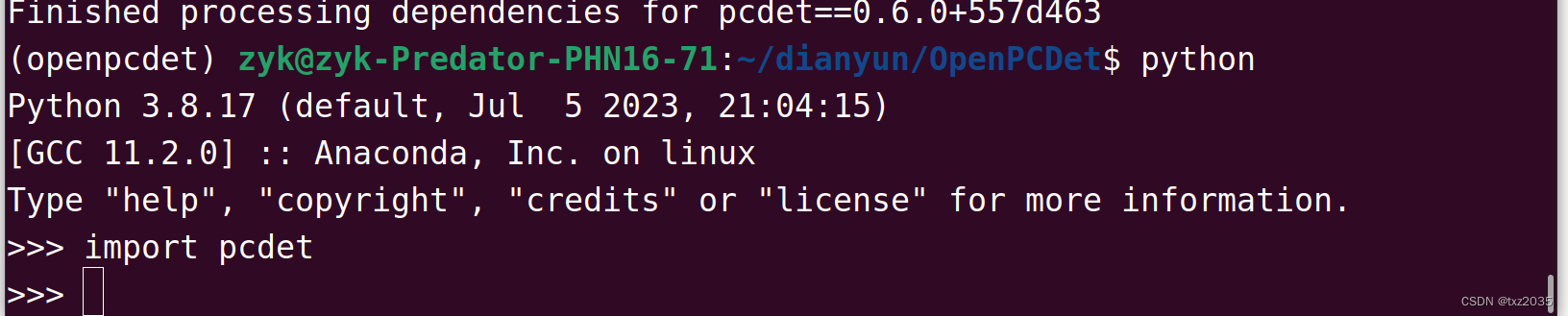
python setup.py develop Vérifiez que l'installation a réussi :
python
importer pcdet
Sept : entraînement et tests des kitti
préparer les données
1. Établissez une connexion douce
cd OpenPCDet/data/kitti
ln -s /home/zyk/desktop/kitti_3D/training formation
ln -s /home/zyk/desktop/kitti_3D/testing
format de l'ensemble de données
├── ImageSets
│ ├── test.txt
│ ├── train.txt
│ └── val.txt
├── test -> /home/zyk/desktop/kitti_3D/testing testing
└── formation ->/home /zyk/desktop/kitti_3D/formation# formation
├── calib
├── image_2
├── label_2
└── velodyne
# test
├── calib
├── image_2
└── velodyne
prétraitement des données
2. Préparer les données :
générer le fichier de données pkl et le dossier gt_database
ouvrez la commande ici
Activez l'environnement :
python -m pcdet.datasets.kitti.kitti_dataset create_kitti_infos tools/cfgs/dataset_configs/kitti_dataset.yaml
Sept, test de formation
Prenons la démo comme exemple
outils cd
python demo.py --cfg_file cfgs/kitti_models/pv_rcnn.yaml --ckpt ckpts/kitti/pv_rcnn_8369.pth --data_path /home/neo/data/kitti/vel/000000.bin
Ou ouvrez pycharm et modifiez ces chemins de fichiers
'--cfg_file', type=str, default=r'/home/zyk/OpenPCDet/tools/cfgs/kitti_models/pointpillar.yaml'
'--data_path', type=str, default=r'/home/zyk/OpenPCDet/data/kitti/testing/velodyne/000009.bin'
'--ckpt', type=str, default=r'/home/zyk/OpenPCDet/tools/pointpillar_7728.pth', help='specify the pretrained model') 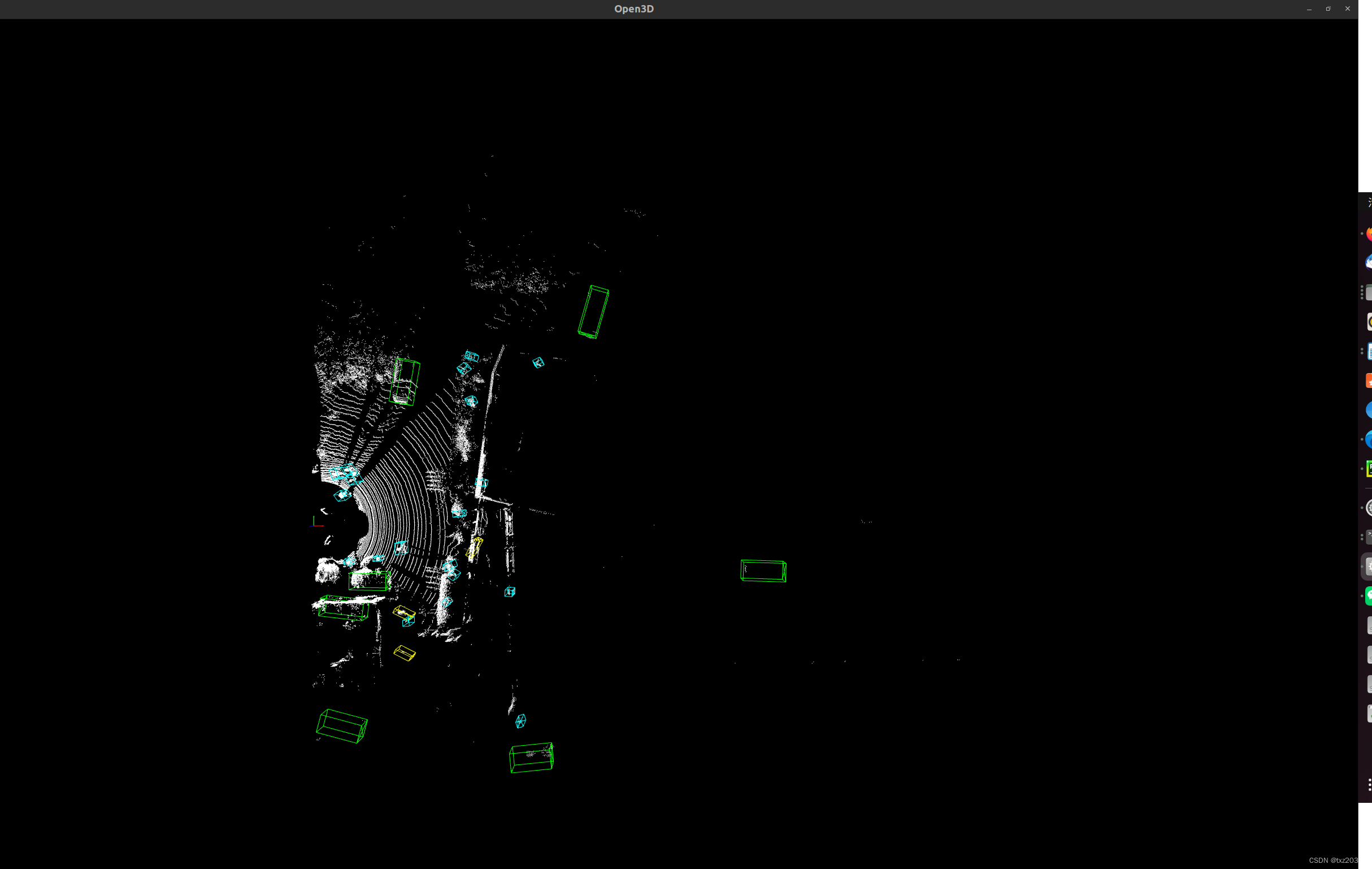
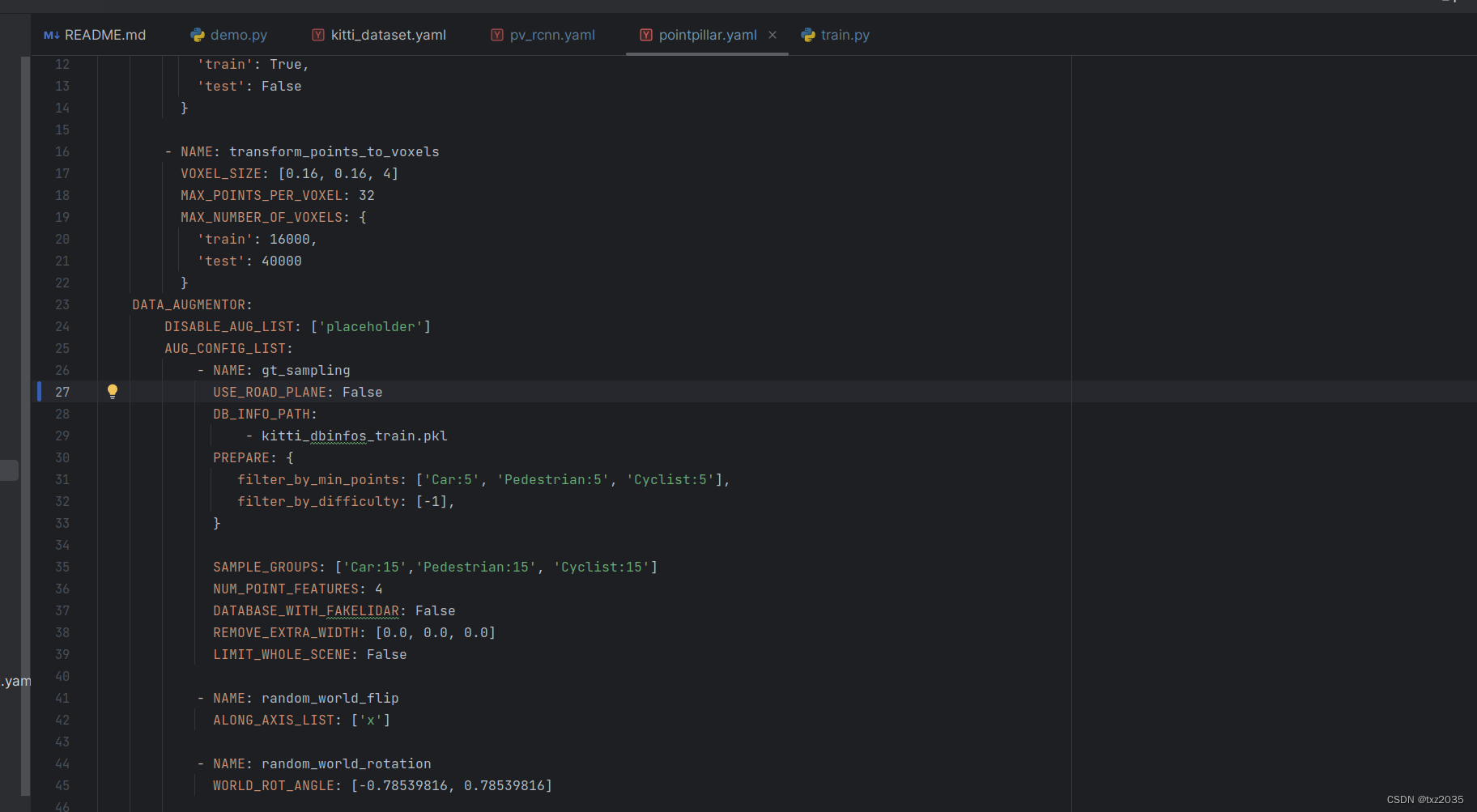
Reproduire le pilier ponctuel :
Erreur : KeyError : 'road_plane'
S'il n'y a pas de données de plan routier, définissez le champ USE_ROAD_PLANE dans pointpillar.yaml :
USE_ROAD_PLANE: False
Regardez la fonction de perte :
pip installer tensorboardX
pip installer tensorflow
Ensuite, ouvrez le terminal pour activer l'environnement virtuel de pcdet dans /home/juzhen/OpenPCDet/output/cfgs/kitti_models/pointpillar_pyramid_aug/default/tensorboard (c'est-à-dire sous le dossier events.out.tfevents.), et saisissez :
Remplacez-le par le vôtre :
tensorboard --logdir= /home/juzhen/OpenPCDet/output/cfgs/kitti_models/pointpillar_pyramid_aug/default/tensorboard


Faites un clic droit pour ouvrir l'URL dans la case rouge pour afficher la visualisation de la fonction de perte pendant le processus de formation (cliquez simplement dessus) : http://localhost:6006/

Si le contenu vous est utile, n'hésitez pas à l'aimer, merci !
Reportez-vous au lien d'origine : Étapes détaillées d'Ubuntu pour installer Anaconda (Ubuntu22.04.1, Anaconda3-2023.03)_ubuntu anaconda_Blog Fengzi du village de Luobei-Blog CSDN